本文主要是介绍2013年Anthrob——打印的拟人机器人,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Anthrob – A Printed Anthropomimetic Robot,2013 13th IEEE-RAS International Conference on
Humanoid Robots (Humanoids). October 15 - 17, 2013. Atlanta, GA
Michael J¨antsch†, Steffen Wittmeier†, Konstantinos Dalamagkidis, Alexander Panos, Fabian Volkart and Alois Knoll.
摘要:
拟人机器人不同于传统的方法,它利用人体内部结构的复制,如肌肉、肌腱、骨骼和关节[1]。这类机器人的突出例子是东京大学JSK实验室开发的机器人,以及由欧盟资助的项目开发的机器人,它们将认知体现在一个复杂的工程机器人(Eccerobot)身上。然而,这些机器人的高度复杂性以及它们缺乏传感器,迄今未能在控制领域提供所需的新见解。
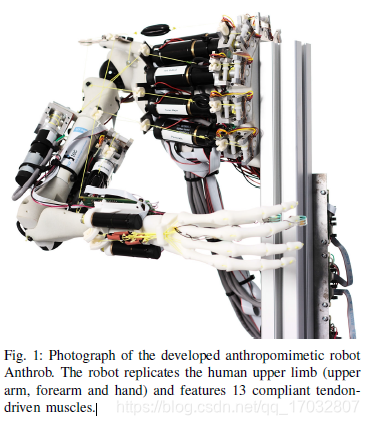
因此,我们开发了简化但有感觉的人形机器人。该机器人复制了人类的上肢,并具有13个顺从肌腱驱动的单关节和双关节肌肉以及一个球形肩关节。只要有可能,选择性激光烧结(SLS)被用于机器人部件的生产,以降低生产成本,并实现尖端技术,如肌腱管或固态关节。
关键词:肌腱驱动机器人,拟人机器人,生物力学,生物机器人
1.介绍:
在过去的十年中,人们对人类友好型机器人的兴趣越来越大,特别是在服务或康复机器人领域,在这些领域,可能的影响会导致严重的伤害甚至死亡。这些是(i)使用额外的传感器来预测冲击,(ii)使用更复杂的控制策略,如关节扭矩控制,以减少不可避免的碰撞[3]的严重性,或(iii)通过模仿人类肌肉系统来利用顺应性肌腱驱动驱动的概念。
特别是肌腱驱动的方法在过去的十年中变得越来越流行,一个高度复杂的肌腱驱动机器人的子类已经出现。这个子类以前所未有的细节水平复制人类骨骼和肌肉系统,因此有时被称为肌肉骨骼或拟人机器人[5]。这类机器人的突出例子是东京大学Jouhou System Kougaku实验室自2002年以来建造的Kenta、Kotaro、Kojiro[6]、Kenzoh和Kenshiro[7]机器人,以及欧盟资助的Eccerobot项目在2009年至2012年期间开发的ECCEs机器人。然而,尽管这些机器人是非常令人印象深刻的人工制品,可证明的稳定控制策略到目前为止还没有开发出来。
原因是多方面的。首先,由于骨骼结构的高度复杂性和缺乏合适的传感器(例如球形关节的位置传感器),使得机器人动力学的跟踪成为不可能,因此经典反馈控制器的开发成为不可能。此外,先进的控制方法依赖于精确的动态模型来计算非线性动力学的前馈补偿。但这只有在机器人模型准确的前提下才能实现,而手工制作的ECCE至少不能满足这一前提。因此,我们简化机器人Anthrob(见图1)但传感器存在差别。它复制人类的上肢(肩、上臂和前臂),但包括一些设计简化为了简化控制器的发展前提下差别机器人的关键结构,即球形关节和多驱动肌肉。该机器人的所有骨骼部件均采用计算机辅助设计(CAD)技术构建,以提供控制器开发所需的输入数据,并有助于(重新)生产该机器人。此外,只要有可能,基于SLS粉末烧结的3D打印技术已经被用于机器人的生产零件采用尖端技术,如肌腱管或固态关节,并将生产成本降到最低。
第二部分总结了机器人的运动学(骨架)、执行器(肌肉)和传感器(受体)。机器人运动的初步结果,从低水平的肌肉控制器的使用,提出在第三节,然后在第四节的结论。
2.设计
该机器人复制了人类上肢,上肢由胸带、上臂、前臂和手[4]的骨头组成。它的大小约为人类男性身高1.7米的2/3,手臂和前臂的长度分别为200mm和180mm。此外,机器人的骨骼和肌肉被设计成能够独立于姿态在末端执行器上举起和握住质量为500 g的交互对象。
A.骨骼
肩关节复合体是人类最复杂的骨骼结构之一。它由肩关节和胸带组成。球形肩关节使肱骨相对肩胛骨在三个相互垂直的轴上运动(见图2a),而胸带有两个功能。首先,它允许肩胛骨运动,如肩胛抬高或降低[4]。其次,它扩展了肱骨运动的范围[8](例如,在手臂外展超过90)。然而,为了降低机器人运动学的复杂性,只复制了肩关节。它包括:(i)固定肩胛骨,(ii)肩胛盂(或窝)和(iii)肱骨头(或球)(见图2c)。
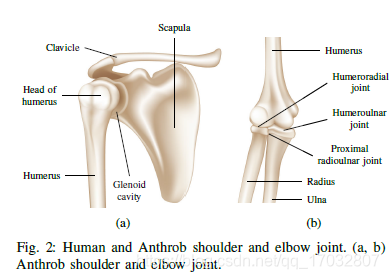
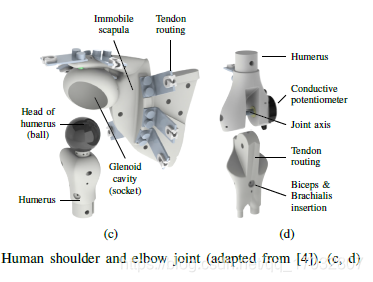
在人类的身体中,肘关节复合联合组成为:(i) 肱桡复合(球形关节肱骨和半径),(2)肱尺合(一个转动关节连接肱骨尺骨)和(iii)近端桡尺骨关节(一个枢轴关节半径和尺骨)[8],[4](见图2 b)。虽然桡尺近端关节允许内旋和外旋(尺侧半径的旋转),但肱骨桡侧关节和肱骨尺关节都有助于前臂[8]的弯曲和伸展。同样,在机器人建造过程中进行了简化来模拟这个复杂的复合关节。首先,前臂尺侧和桡骨作为单根骨,减少了肘关节可能的屈伸运动。其次,桡骨和尺骨的缺失使得肱骨桡尺近端以及肱桡关节的两个自由度失效。因此,将肘关节作为标准转动关节来实现,最大运动范围约为135度,如图2d所示。这一范围与已报道的人类数据相比较,人类的活动范围约为145度,女性和男性的[8]略有差异。
另一个极其复杂但多才多艺的人类骨骼结构是手。在解剖学上,它由指骨、腕和掌骨组成,通过远端桡尺和桡腕关节[4]与前臂相连。这种复杂的骨骼结构允许四种主要类型的握把:(i)夹紧或精密握把,(ii)动力握把,(iii)键握把和(iv)钩握把[4]。然而,为了研究机器人控制器在操纵任务中的性能,电源控制是足够的,这使设计得到了一些简化。首先,省略远端桡尺关节和桡腕关节以及相应的肌肉,通过被动但可调节的关节将手与前臂连接。这样,手的姿势在操作过程中不会改变,但如果需要,可以根据特定实验的要求来改变。其次,不需要腕中关节、腕近端与远端骨列间的关节、腕掌关节、腕与掌骨间的关节、食指、中指、无名指和小指的关节。
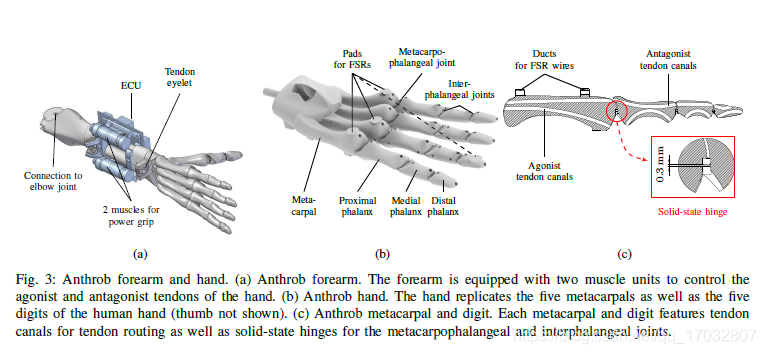
所研制的机械手如图3所示。它包括五个掌骨和五个手指及其近端、中端和远端趾骨。掌指关节和指间关节均为固态铰链。这是可能的,因为整个手是由最先进的3D打印技术,即SLS生产的。在这种类型的关节中,连接在一起的两块骨头沿着关节轴的运动是由一种非常薄的材料薄膜——0.3mm的聚酰胺2200层(PA-2200)实现的(见图3c)。需要特别注意的是,打印过程中所使用的材料层必须与所要求的连接轴平行,否则连接会断裂。这种方法不仅产生了一种非常纤细和轻便的设计,而且使仅由两部分组成手成为可能:(i)拇指和(ii)包括掌骨和腕骨在内的其余四根手指。此外,由于生产技术的原因,还可以在鉴别触摸传感器的导线中加入肌腱管和导管(见图3c和IIC分段),进一步降低了生产成本,简化了手工装配。
B.肌肉
人类上肢有50多种不同的肌肉,其中一些甚至构成多个肌肉头。然而,由于对机器人的骨骼进行了简化(参见前面的部分),并不是所有这些肌肉都需要复制才能模仿人类的动作。
例如,肩胛或锁骨的运动需要许多肩部肌肉。然而,由于这些骨头的缺失,只有与肱骨运动有关的肌肉对机器人来说是重要的。此外,一些肌肉头,如肱二头肌的长头和短头,可以合并而不失去一个显着范围的上臂运动。因此,机器人的肩关节由9块肌肉驱动,原点和插入点与人类相似。然而,必须指出的是,人类肩膀肌肉往往没有一个单一的起源和插入点,而是通过更大的表面(如冈下[4])与骨骼相连。在这些情况下,选择理想的肌肉锚点,机器人模仿其人类对手的功能(见图4,表II,和[4])。
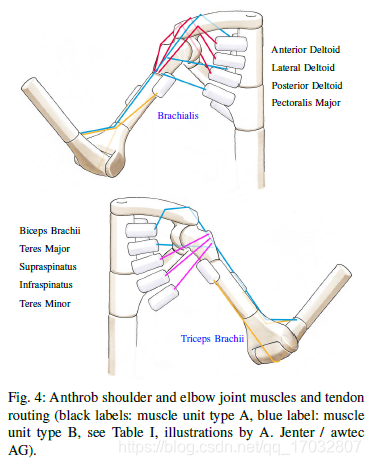
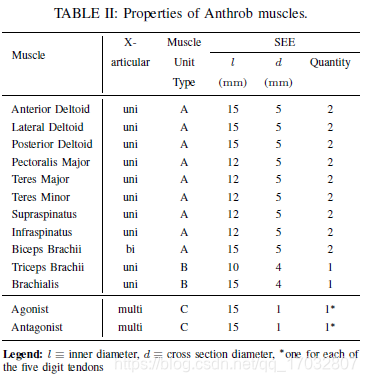
在人类身体上,三块肌肉有助于肘关节的弯曲和伸展:(i)肱肌,(ii)肱三头肌,它有单头和双关节头,(iii)肱二头肌,它只有双关节头[4],[8]。对于机器人来说,所有的三块肌肉都被模仿,但是只有肱二头肌被实现为双关节肌肉(见表二)。再次选择原点和插入点来模仿人类肌肉的功能。
机器人手部肌肉的实现与肩部和肘关节肌肉有明显的不同。主要原因是目标握力不需要每个手指都单独控制。因此,每个手指上都装备有一个激活器和拮抗肌腱,由两个肌肉同时收缩,一个肌肉为所有手指的激活器,另一个肌肉为所有手指的拮抗肌腱(见图3c)。然而,为了确保手在握力时能够适应被操纵物体的形状,10根肌腱中每根都有一个专用丁腈橡胶(NBR)环作为串联弹性元件(见表二)。
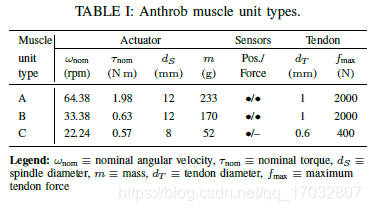
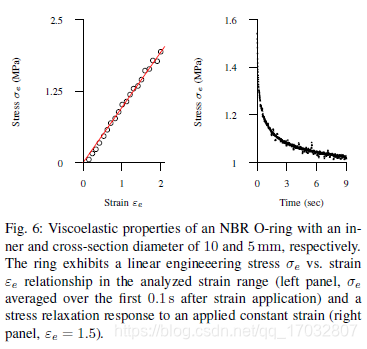
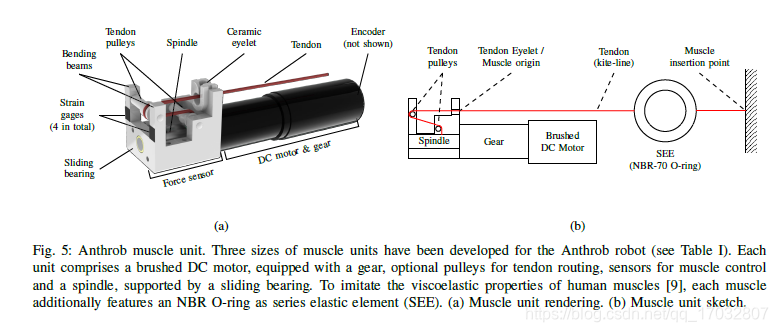
基于串联弹性执行机构[10]的原理,为拟人机器人的肌肉设计了一种模块化的肌肉单元。肌肉单元包括一个有刷直流电动机,齿轮箱、用于肌腱走线的可选滑轮、用于肌肉控制的传感器(见下文)和由滑动轴承支承的主轴,以减少传动轴上的径向力。采用超高分子量聚乙烯编织而成的两种高性能绳索作为肌腱(见表一),每条肌肉都装有NBR环,模拟人体肌肉的粘弹性特性(见[9]和图5b)。选用NBR为复合橡胶,通过对六种不同内、横截面直径不同的NBR O型环拉伸性能的实验识别,发现2.0以下的应变呈现线性粘弹性响应(图6)。粘弹性响应的特征是线性应力/应变关系和应力松弛行为(应力随着施加的恒定应变而降低),这让人想起人类肌肉肌腱单元[9]。匹配单个肌肉的力量和刚度要求,选择合适的环配置基于实验结果的每一块肌肉(见表2)。类似于其他肌肉骨骼肌肉单位使用机器人,肌肉萎缩了绕线电动机轴上的肌腱[1],[7]。因此,肌腱施加的最大线速度和力取决于主轴半径以及齿轮输出轴的最大速度和扭矩,而最大速度和扭矩又由所使用的执行机构(直流电机和齿轮)来定义。这里,三个不同的组合是用于匹配的特定力量需求肩关节,肘关节和手的肌肉(A, B和C,分别见表1和表2)。选择组合的计算最坏的肌腱力量最小杠杆臂和最大引力的肩,肘和手的肌肉在交互对象重500克。考虑了1.5的安全系数,以适应肌腱的摩擦力由于肌腱路由。
C.感受体
在人类中,感觉来自于分布在身体各处的各种受体。在机器人技术中,特别是对本体感觉(身体[11]肢体的静态位置和运动的感觉)和辨别触摸(触摸的感知和定位)起作用的感受器,对控制和操纵物体非常重要。因此,机器人已经装备了各种传感器来模拟这些受体。在人类身体中,三种类型的肌肉和关节的机械提供本体感受的反馈:(i)提供肌肉长度、速度和张力的反馈的肌梭受体,(ii)高尔基肌腱器官,感知一组肌肉纤维施加的收缩力,(iii)关节胶囊提供当前信息的机械关节位置[11]。模仿这些机械感受器的传感器也被包括在Anthrob机器人中。首先,所有肌肉单元都配备了一个编码器来测量电机的位置和速度,以及一个基于霍尔效应的电机电流传感器,集成在电子控制单元(ECUs)中。尽管可以通过电流估计直流电机的输出扭矩和肌腱力,但由于齿轮箱中的摩擦损失,这种技术只能提供可靠的数据,用于更高扭矩或更高速度下的扭矩。因此,肩关节和肘关节的所有肌肉(肌肉单元分别为A型和B型)都增加了一个定制的肌腱力传感器(见图5),便于实现状态空间肌腱力控制器。该传感器使用四个应变计,分别连接在两根弯曲梁的两侧,构成惠斯通桥,来测量弯曲梁的挠度,从而测量施加的肌腱力。此外,为了模拟关节机械感受器,在肘关节上安装了导电电位器。遗憾的是,用于球形肩关节的类似传感器是不可用的,通常使用光学替代品。例如,Urata等人为肌肉骨骼机器人Kotaro[12]开发了一种基于关节集成微型摄像机的球形关节传感器。然而,这种传感器还没有商业化。因此,我们开发了一种高速立体视觉运动捕捉系统,利用红外光和反反射标记,安装在机器人肩胛骨和肱骨上(如图1所示)来跟踪肩关节的位置和速度(见[13])。在人体中,手指无毛(无毛)皮肤、手掌表面、脚底和嘴唇上的识别受体密度最大。显然,对于物体的操作和识别,手指和手掌表面的受体尤为重要。因此,在无名指的远端指骨和机械手的三个掌骨头上安装了力敏电阻(FSRs)来测量操作时的握力(见图3b)。为了最大限度地提高FSR的灵敏度,提高指尖与被抓取物体之间的摩擦力,传感器本身的薄材料被嵌入两层橡胶材料之间。
3.结果
所有肌肉单元都由分布式、定制的电子控制单元(ECUs)控制,ECUs通过控制器区域网络(CAN)[14]、[1]接口。每个ECU能够控制两个肌肉单位和配备了一个单片机,一个CAN接口,电机驱动两个刷直流电机,几个模拟/数字转换器(a / D)用于模拟传感器连接,在电机回路中集成了两种基于霍尔效应的电流反馈测量装置(见也分段II-C)。为了在机器人运行过程中获得较高的鲁棒性,每个ECU都被实现为一个基于有限状态机(FSM)的固件的故障沉默单元。
为了促进高级联合或操作空间控制器的开发,在ECUs上开发并实现了一套四种低级肌肉控制器。这些是(i)电压控制模式,(ii)比例微分(PD)电机位置控制模式,(iii)比例积分导数(PID)电流控制模式和(iv)状态空间肌力控制器,已证明优于传统的PD方法[15]。所有控制器执行的控制频率为1千赫,这是足够的,因为看到减慢肌肉动力学。
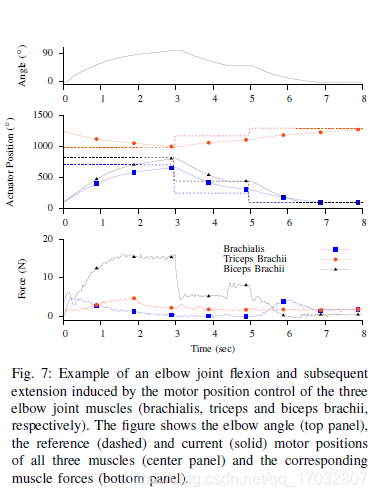
如图7所示,肘关节屈曲和伸展是由肘关节三头肌和肱二头肌的运动位置控制引起的。在这里,我们在预先定义的时间(例如在t = 3秒),同时为这三块肌肉设置了新的运动位置参考。然而,虽然使用的控制方法非常简单,但是观察到的肘关节运动是平稳的。这是形态计算[16]的一个优雅示例,因为肌肉的顺应性弥补了计时不准确,并确保前臂最终达到稳定状态。附件视频中可以看到机器人整个上肢的复合运动。
4.结论
介绍了拟人机器人Anthrob的设计与实现。机器人的骨架复制了人类上肢,主要通过3D打印来制作,降低了制作成本。此外,还特别注意忠实地再现人类肌肉系统的动态。在这里,模拟人类骨骼肌粘弹性特性的肌腱驱动、电磁驱动和顺应性肌肉被开发出来。此外,与现有的拟人机器人相比,Anthrob配备了大量的传感器来模仿人类身上发现的受体。因此,一个传感机器人平台被创造出来,它可以作为神经科学家和控制工程师的试验台。之前提出的计算肌肉控制算法已经在机器人[15]上得到了成功的验证。然而,我们也希望这个机器人的应用将不局限于机器人本身的应用,而是最终将有助于阐明我们对人类运动控制的理解。
5.致谢
导致这些结果的研究获得了欧洲共同体第七框架计划FP7/2007-2013 -挑战2 -认知系统、交互、机器人的资助。231864 - ecce机器人。
这篇关于2013年Anthrob——打印的拟人机器人的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






