本文主要是介绍霍尔,磁编码器(AS5600 ,AS5048A),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
霍尔编码器:
STM32Cube HAL库——霍尔编码器测速(电机转速测量)-CSDN博客
霍尔编码器(Hall Encoder)是一种用于测量旋转位置和方向的传感器。它通过感应磁场变化来测量旋转轴的位置和方向。
霍尔编码器通常由霍尔传感器、磁极和信号处理电路组成。磁极固定在旋转轴上,随着轴的旋转,磁场的变化被感应到,传感器可以测量这些变化并将它们转化为数字信号。这个数字信号表示旋转轴相对于一个参考位置的旋转角度和方向。
霍尔编码器是一种通过磁电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。由霍尔码盘和霍尔元件组成。霍尔码盘是在一定直径的圆板上等分地布置有不同的磁极。霍尔码盘与电动机同轴,电动机旋转时,霍尔元件检测输出若干脉冲信号,为判断转向,一般输出两组存在一定相位差的方波信号。



霍尔编码器和磁编码器的关系:
霍尔编码器是一种基于霍尔效应的传感器,利用电流通过导体时产生的磁场变化来检测位置和运动。它由霍尔元件和信号处理电路组成,当磁场作用于霍尔元件时,会产生电压信号。
磁编码器则是一种利用磁场变化来测量位置和运动的设备。它通常由一个磁头和一个磁盘或磁带组成,磁头感知磁场变化并将其转换为电信号。磁编码器具有高分辨率、精确度和稳定性,广泛应用于机械工程、自动化控制和精密测量等领域。
虽然霍尔编码器和磁编码器都用于测量位置和运动,但它们的工作原理和应用领域不同。霍尔编码器基于霍尔效应检测磁场变化,适用于需要快速响应和无接触检测的场合;而磁编码器则利用磁场变化进行测量,主要用于需要高精度测量和控制的领域。
霍尔传感器和编码器的关系:
伺服电机,自带了霍尔传感器,通常还需要配编码器。
霍尔传感器是一种基于霍尔效应的磁传感器,它可以直接检测磁场的变化。在电机控制中,霍尔传感器通常用于检测转子的位置,从而确定电机的运行状态。当电机旋转时,转子上的永磁体会改变霍尔传感器周围的磁场,进而产生霍尔电压。这个电压信号可以被转换为数字信号,用于控制电机的运行。
编码器则是一种将旋转或线性运动转换为数字信号的设备。它通常由一个旋转盘或线性轨道以及一个或多个光电传感器组成。当旋转盘或线性轨道移动时,光电传感器会检测到标记或刻度的通过,从而产生脉冲信号。这些脉冲信号可以被计数和解释,以确定旋转或线性运动的位置和方向。
三种编码器:
光学编码器,磁编码器,电容式编码器
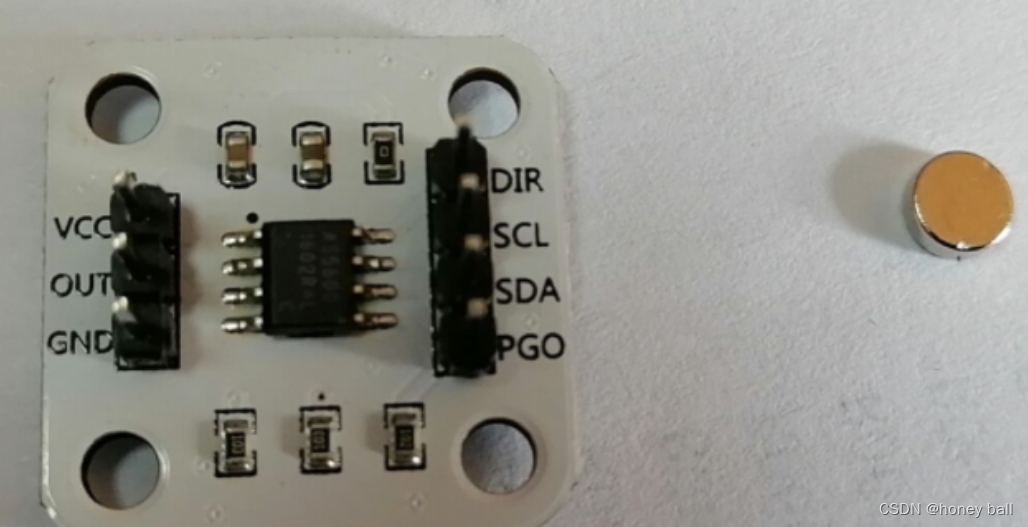
AS5600 磁编码器:
AS5600 磁编码器使用心得及总结-CSDN博客


2.磁编码器(适用于小型,低转速电机上的编码器)
磁性旋转编码器依赖于三个主要组件:磁盘,传感器和调节电路。
磁盘已磁化,其圆周上有许多磁极。传感器检测磁盘旋转时磁场的变化,并将此信息转换为正弦波。传感器可以是感应电压变化的霍尔效应器件,也可以是感应磁场变化的磁阻器件。调节电路对信号进行倍增,分频或内插以产生所需的输出。磁铁和磁编码器是不用接触的,AS5600这类廉价的磁编码器,便宜,耐用,没有物理接触磨损也没有LED灯,甚至可以没有阻力。
AS5600、磁铁:

磁编码器固定的位置很重要!!!要使用磁编码器,那就需要安装AS5600,以及把配套磁铁给贴在电机轴的位置。磁铁和磁编码器的最大距离不应超过1mm,超过就无法检测出!!!

磁环:个人理解,就是与磁编码器配合使用的那个磁铁,给霍尔传感器提供磁场的
这篇关于霍尔,磁编码器(AS5600 ,AS5048A)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







