本文主要是介绍【数据结构与算法】常见排序算法(Sorting Algorithm),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 相关概念
- 1. 冒泡排序(Bubble Sort)
- 2. 直接插入排序(Insertion Sort)
- 3. 希尔排序(Shell Sort)
- 4. 直接选择排序(Selection Sort)
- 5. 堆排序(Heap Sort)
- 6. 快速排序(Quick Sort)
- 6.1 hoare快排(最早的快排方法)
- 优化快排(重要)
- 1. 减少函数递归的栈帧开销(虽然不用,但必须了解)
- 2.三位取中法取基准值(重点)
- 6.2 挖坑法快排
- 6.3 双指针法快排
- 6.4 非递归快排
- 快速排序的排序速度比较(包含测试代码)
- 7. 归并排序(Merge Sort)

相关概念
- 排序:所谓排序,就是使一串记录,按照其中的某个或某些关键字的大小,递增或递减的排列起来的操作。
- 稳定性:说简单点就是有相同值时,排序后这些相同值互相顺序没发生变化则称为稳定的排序算法。假定在待排序的记录序列中,存在多个具有相同的关键字的记录,若经过排序,这些记录的相对次序保持不变,即在原序列中,r[i]=r[j],且r[i]在r[j]之前,而在排序后的序列中,r[i]仍在r[j]之前,则称这种排序算法是稳定的;否则称为不稳定的。
- 内部排序:数据元素全部放在内存中的排序(重点)。
- 外部排序:数据元素太多不能同时放在内存中,根据排序过程的要求不能在内外存之间移动数据的排序(了解)。
常见排序算法时间、空间、稳定性:
- 直接插入排序:O(n2),正常情况下最快的O(n2)排序算法,稳定。
- 希尔排序:O(n1.3),比O(n*log2n)慢一点点,不稳定。
- 直接选择排序:O(n2),比冒泡快,比插入慢,不稳定。
- 堆排序:O(n*log2n),不稳定。
- 冒泡排序:O(n2),稳定。
- 快速排序: O(n*log2n),不稳定,空间O(log2n)。
- 归并排序 O(n*log2n),稳定,空间O(n)。
排序不特别说明,则排序以升序为例。
时间复杂度不特别说明,则默认最坏时间。
空间复杂度不特别说明,则默认O(1)。
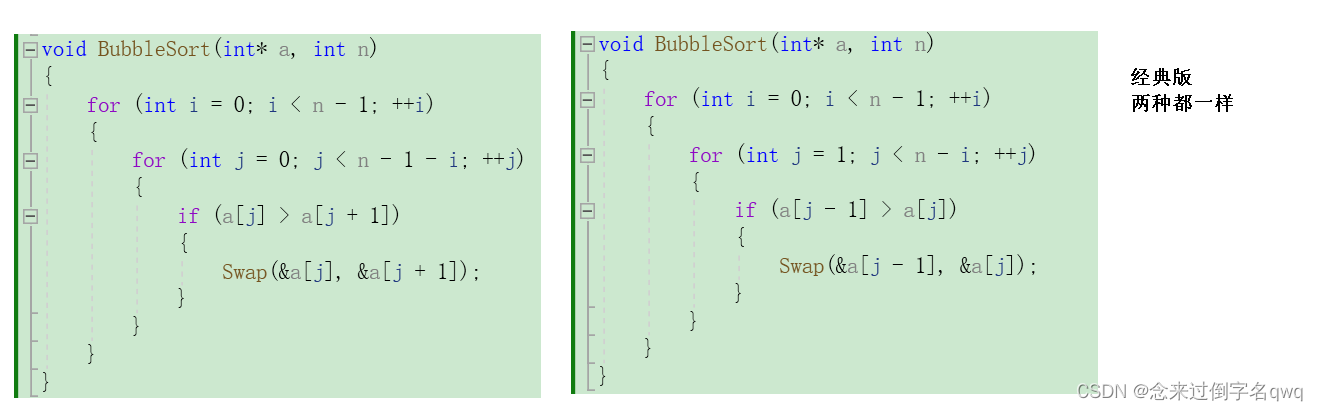
1. 冒泡排序(Bubble Sort)
思想:两两比较,再交换。前一个值比后一个值大,交换两个值。

优化冒泡排序,冒泡排序优化版:
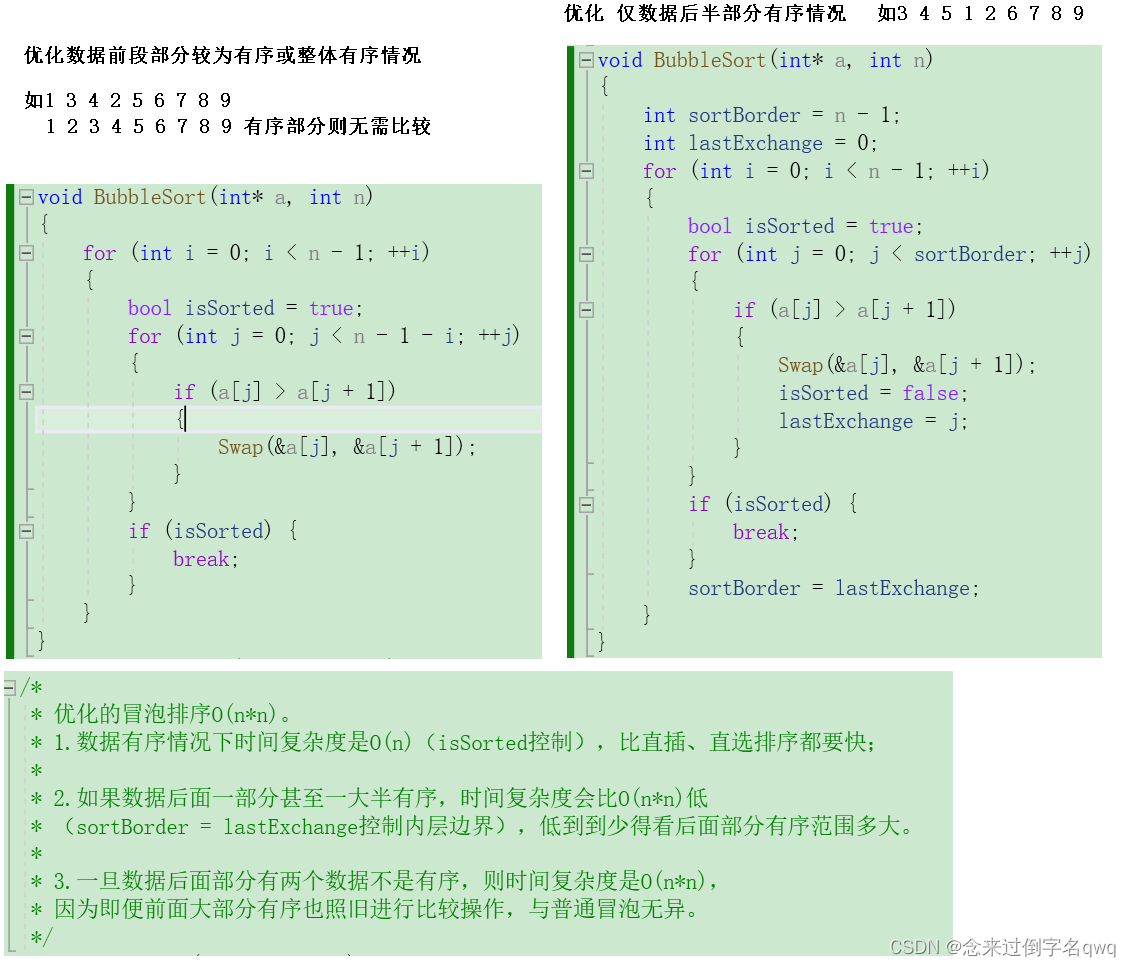
void BubbleSort(int* a, int n)
{int sortBorder = n - 1;int lastExchange = 0; for (int i = 0; i < n - 1; ++i) {bool isSorted = true; for (int j = 0; j < sortBorder; ++j) {if (a[j] > a[j + 1]) {Swap(&a[j], &a[j + 1]);isSorted = false;lastExchange = j;}}if (isSorted) {break;}sortBorder = lastExchange;}
}
void Swap(int* px, int* py)
{int tmp = *px;*px = *py;*py = tmp;
}
2. 直接插入排序(Insertion Sort)
思想:类似将扑克牌排序的过程,数据越有序,排序越快。
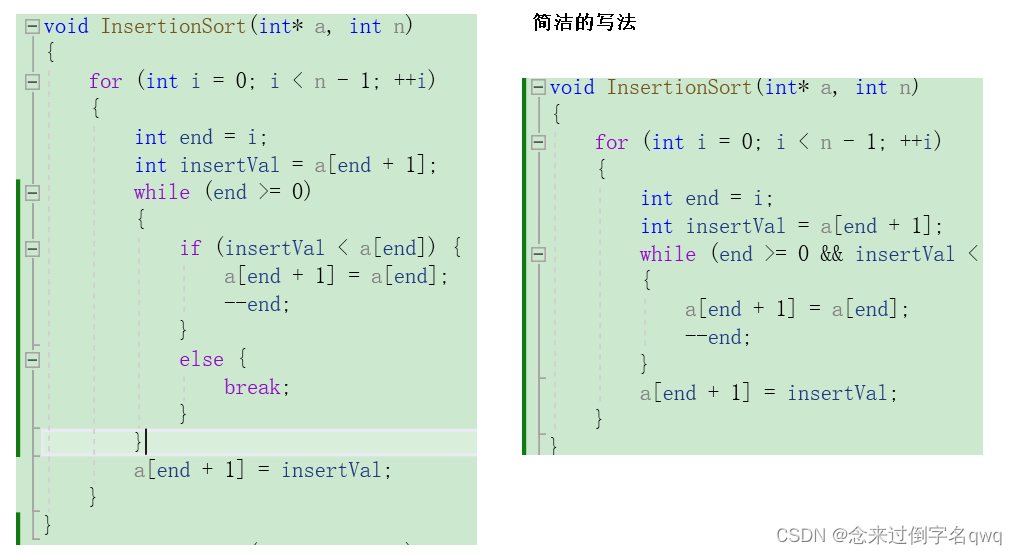
void InsertionSort(int* a, int n)
{for (int i = 0; i < n - 1; ++i){int end = i;int insertVal = a[end + 1];while (end >= 0 && insertVal < a[end]){a[end + 1] = a[end];--end;}a[end + 1] = insertVal;}
}
直接插入排序O(n*n),n方的排序中,直接插入排序是最有价值的。其它的如冒泡,直接选择排序等与直接插入排序一样N方的排序都是五十步和百步的区别,总体来看没啥区别,都不如直接插入排序,看以下几点分析以及排序时间比较,再就是大家自己编一串数据走查一下排序过程即可发现。
1.排升序而数据大致是降序,或排降序而数据大致是升序情况下,直接插入排序的时间复杂度是O(n*n),因为比较挪数据次数是等差数列之和。
2.数据大致有序,且排序顺序与数据顺序一致情况下,直接插入排序的时间复杂度是O(n),因为比较挪数据次数较少(不进入while循环)。比如排升序,而数据也大致也是升序状态(较为有序 或 直接就是有序的)。
3.虽然直接插入排序与冒泡排序的时间复杂度是同一个量级,但不谈上面第一种情况,
正常大多都是数据随机排列情况下前者比后者快很多,这时比较挪数据次数不会是等差数列之和,中间一般多少会有一部分是有序的,有那么几趟是不进入while循环的,比较挪数据次数当然是比等差数列之和要少的。虽然还是O(n*n)的量级,但明显是比冒泡快,至于快多少则是看有序的数据多不多(极限就是第二种情况)。
10w个数据 排序速度对比:
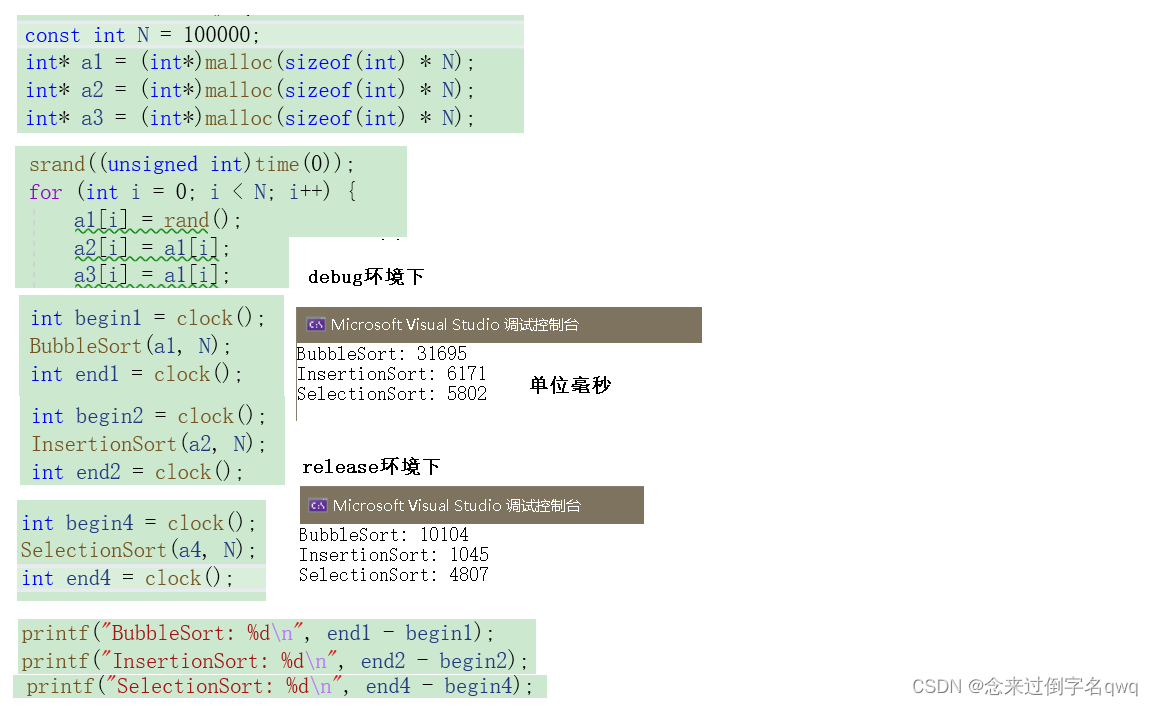
release环境是发布版本环境,对代码是有很大优化的,优化点大致是:
- 相比于debug环境,release环境生成的目标文件包含很少调试信息甚至没有调试信息。
- 减少了很多消耗性能或不必要的操作,不对代码进行边界检查,空指针检查、assert断言检查等。
- 特别是对递归优化巨大,也就是对函数栈帧的创建/栈的消耗优化很大,比如对于debug环境下栈溢出的程序,切换成release则不会造成栈溢出。
博主水平有限,不知道更多相关细节或是底层原理,如有错误恳请指正。
3. 希尔排序(Shell Sort)
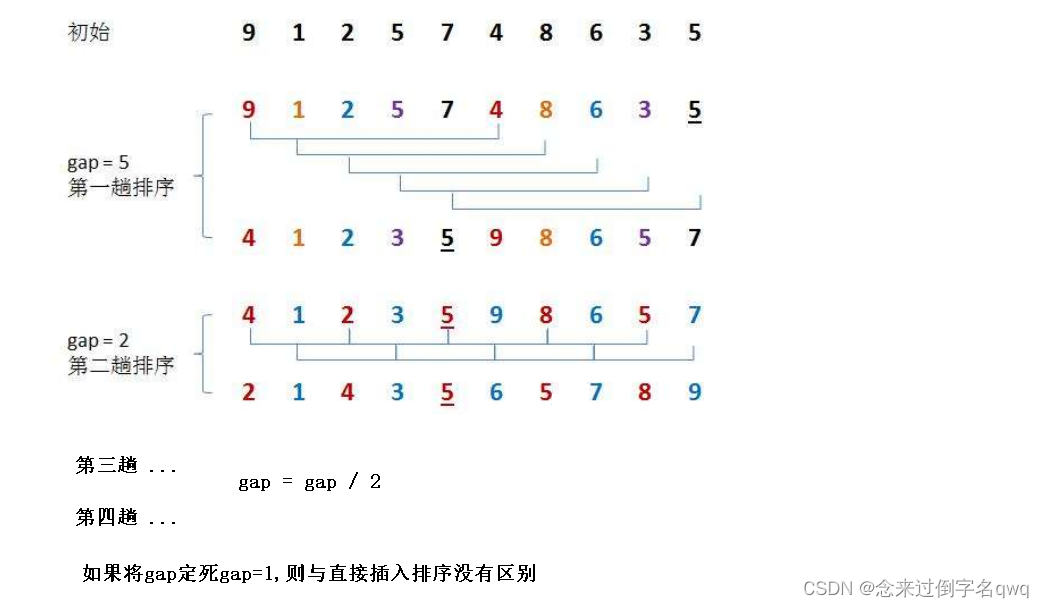
希尔排序是直接插入排序的优化版,对于直接插入排序而言,数据越有序,排序越快,希尔排序正是借助直接插入排序的特点进行了优化。
思想:先对数据分组进行几次预排序(对数据分组进行直接插入排序),使数据形成较为有序的情况,最后整体进行一趟直接插入排序即可完成排序。
void ShellSort(int* a, int n)
{int gap = n; while (gap > 1) {gap = gap / 3 + 1; // gap / 2也可for (int j = 0; j < n - gap; ++j) {int end = j;int insertVal = a[end + gap];while (end >= 0 && insertVal < a[end]) {a[end + gap] = a[end];end -= gap;}a[end + gap] = insertVal;}}
}
-
希尔排序不好计算确切的时间复杂度,有牛人通过大量实验证明平均时间复杂度大致为O(n^1.3),比O(n*logn)要慢一点点,但两者差不多是同一量级。
-
gap>1时是预排序,gap=1时等于直接插入排序。
-
gap的取值,gap/2或gap/3+1是当前主流,也被认为是gap最好的取值。gap相当于划分多少组进行预排序,如果定死gap=1则与直接插入排序无异。gap/2或gap/3+1则是划分每组多少个数进行预排序,gap/3+1中的+1是因为要保证最后一组排序时gap=1进行直接插入排序操作。严格来说只要能保证最后一趟gap=1,无论gap除以几加几,都算是希尔排序。
-
每一组预排序后,都会逐渐加大数据的有序情况。后面几组预排序虽然每组划分的数据多了(gap逐渐减小间隔变小了),也就是比较次数变多了,但经过前面的预排序后数据渐渐有序,实际不会进行过多的比较挪数据操作,每前一次预排序都为后一次预排序减轻压力。
速度对比(毫秒):
4. 直接选择排序(Selection Sort)
每一次从待排序的数据元素中选出最小(或最大)的一个元素,存放在序列的起始位置,逐步向后存放。
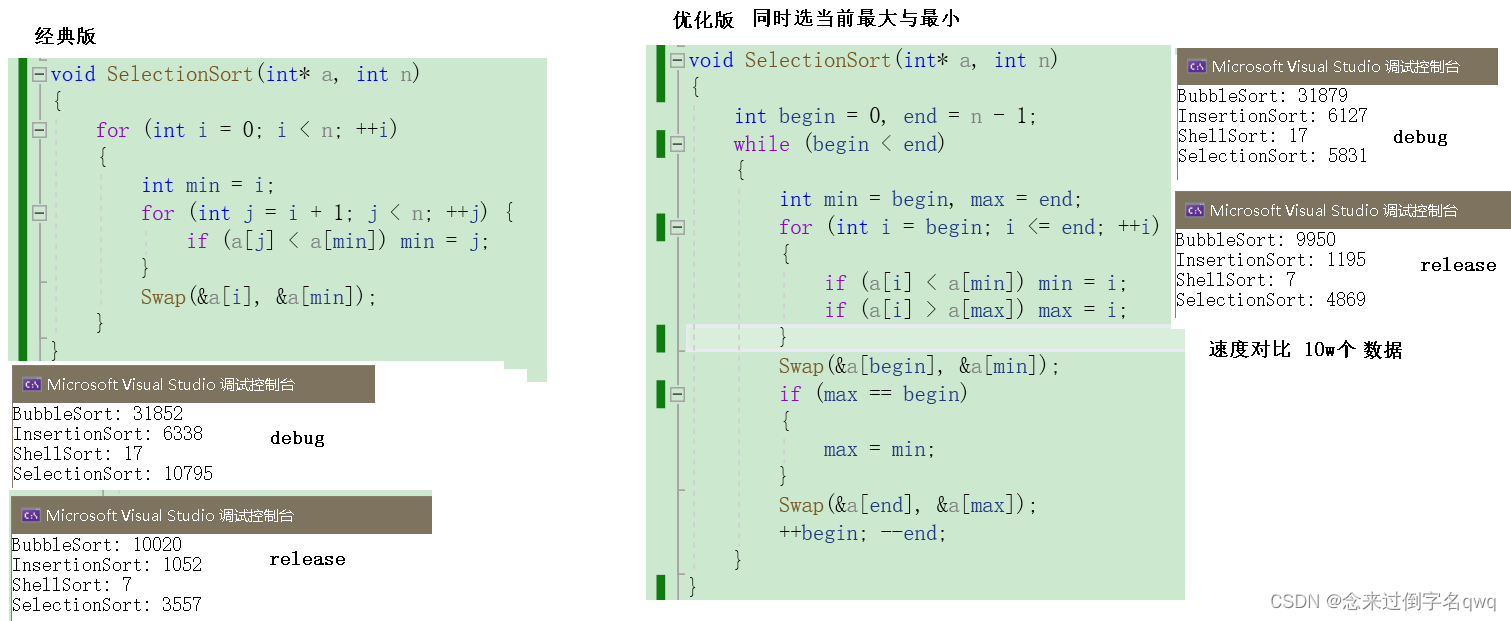
数据较为有序的情况下,直接选择排序选要比冒泡、直接插入排序慢。
void SelectionSort(int* a, int n)
{int begin = 0, end = n - 1;while (begin < end){int min = begin, max = end;for (int i = begin; i <= end; ++i){if (a[i] < a[min]) min = i;if (a[i] > a[max]) max = i;}Swap(&a[begin], &a[min]);if (max == begin){max = min;}Swap(&a[end], &a[max]);++begin; --end;}
}
在优化版中,必须有这样一个判断max==begin,并更新max的下标值!最小的数a[min]换到了左边begin位置,如果最大的数的下标max正好等于begin,那就出现这种问题:最大的数a[max]已经被换到min下标位置了,即a[min]才是最大数;而本来a[max]是最大的数,由于max==begin,而经过前面a[begin]与a[min]交换的影响,导致a[begin]/a[max]变成了最小的数,不加判断并更新max的后果是把最小的数放在右边end位置了。
5. 堆排序(Heap Sort)
了解堆请看:文章 堆 / 堆排序 / TopK问题(Heap)
时间复杂度O(nlog2n),排序速度与希尔差不多。也可以向上调整建堆,但比向下调整建堆要慢一些。
void HeapSort(int* a, int n)
{for (int parent = (n - 1 - 1) / 2; parent >= 0; --parent) {AdjustDown(a, n, parent);}for (int end = n - 1; end > 0; --end){Swap(&a[0], &a[end]);AdjustDown(a, end, 0);}
}
/* 将堆向下调整为大堆 */
void AdjustDown(int* a, int size, int parent)
{int child = parent * 2 + 1; // 选出较大子节点child = child + 1 < size && a[child + 1] > a[child]? child + 1 : child;while (child < size && a[child] > a[parent]){Swap(&a[child], &a[parent]);parent = child; // 重复往下child = parent * 2 + 1;child = child + 1 < size && a[child + 1] > a[child]? child + 1 : child;}
}
parent初始为最后一个非叶子节点(多一个 -1 的原因),
向下调整(建大堆),往堆顶方向走把所有非叶子结点调整一遍。
堆顶最大值与堆底较小值交换,然后排除这个堆底的最大值(a[end]),
剩下的作为堆,从堆顶较小值开始向下调整为大堆(–end一步步排除新的最大值a[end])。
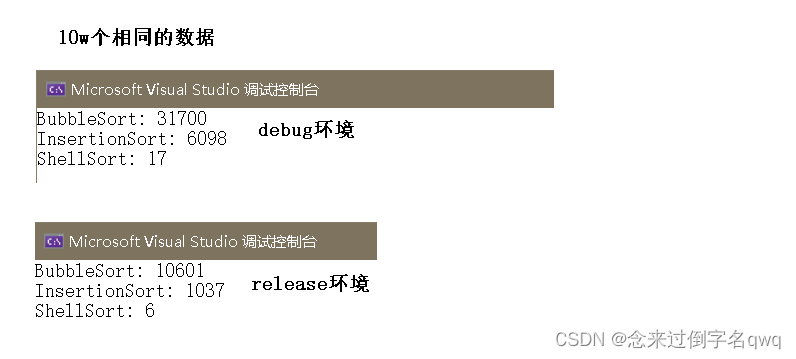
10w个数据,排序速度对比:
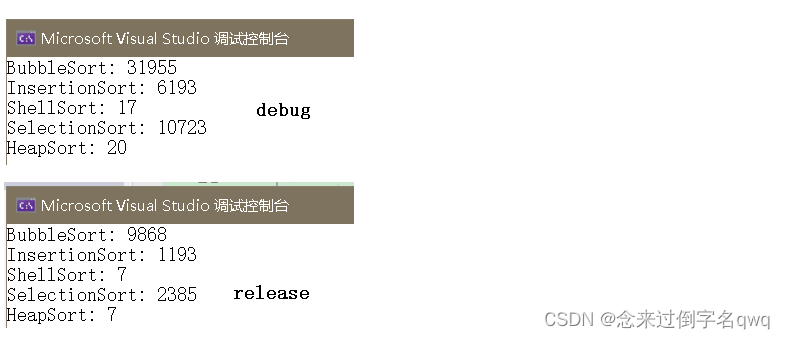
堆排序时间复杂度严格来算:
- 向上调整建堆O(nlogn) + 排序O(nlong):O(2n*2logn)。
- 向下调整调整建堆O(n) + 排序O(nlogn):O(2n*logn)。
所以说希尔排序O(n1.3)比O(n*log2n)要慢些,但却是同一量级。不过堆排序的时间复杂度严格来说比真正的O(nlog2n)要慢一点点,所以希尔排序与堆排序的速度相同。
6. 快速排序(Quick Sort)
快速排序是Hoare于1962年提出的一种二叉树结构的交换排序方法。
6.1 hoare快排(最早的快排方法)
基本思想:取待排序数据中的某个元素作为基准值,将数据分割成两子序列,左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值,然后左右子序列重复该过程进行分割,直到所有元素都排列在相应位置上为止。
// 1.hoare递归(最早的快排方法)
void QuickSort1(int* a, int begin, int end)
{if (begin < end) {int left = begin;int right = end;int keyi = begin; // 基准值(下标)while (left < right) { /* 必须加上left<right防止内循环越界;>=而不是>,<=而不是<,防止重复值死循环。*/while (left < right && a[right] >= a[keyi]) {--right; // 找小的}while (left < right && a[left] <= a[keyi]) {++left; // 找大的}Swap(&a[left], &a[right]);}Swap(&a[left], &a[keyi]);QuickSort0(a, begin, left - 1); // 左区间序列QuickSort0(a, left + 1, end); // 右区间序列}
}
基准值的取法:
- 取序列第一个数据,需要右指针right先走(学习时往往采用的方式,上面动图演示也是基于这个方式);或取序列最后一个数据,需要左指针left先走(本质与前者没区别)。
- 三位取中法:key、left和right中取第二大的值作为基准值。(这是优化版,推荐)
优化快排(重要)
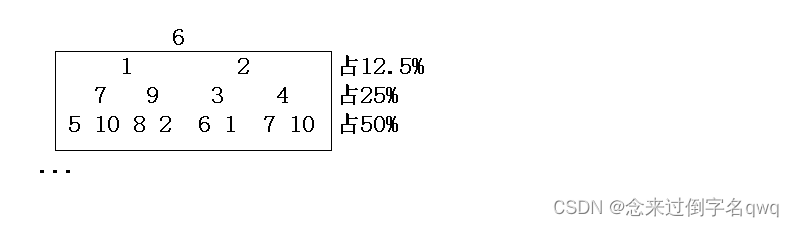
1. 减少函数递归的栈帧开销(虽然不用,但必须了解)
优化hoare快排的递归开销:递归树最后两三层(小区间)改用插入排序,减少大量函数栈帧内存消耗。该优化在debug环境下确实能优化,在逻辑上也确实能优化,但release环境同样也对递归进行了优化,而且优化力度只会更大,所以小区间使用插入排序减少递归栈帧的优化方案或许起不到效果。
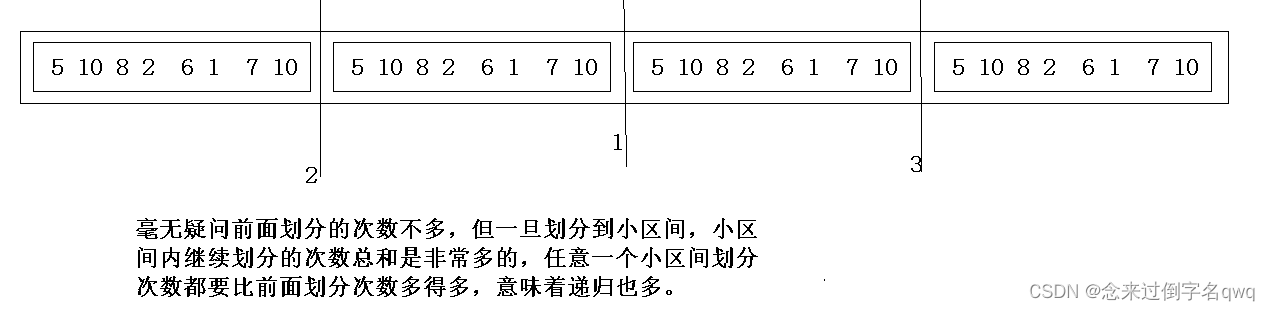
例如一颗满二叉树,可以看到最后两三层的数量是最多的:
对于hoare快排划分左右区间同理:
#define RECUR_MAX 10
void QuickSortX(int* a, int begin, int end)
{if (begin < end){if (end - begin + 1 <= RECUR_MAX){InsertionSort(a, end - begin + 1);}else{int left = begin;int right = end;int keyi = begin; // 基准值(下标)while (left < right){ /* 必须加上left<right防止内循环越界;>=而不是>,<=而不是<,防止重复值死循环。*/while (left < right && a[right] >= a[keyi]) {--right; // 找小的}while (left < right && a[left] <= a[keyi]) {++left; // 找大的}Swap(&a[left], &a[right]);}Swap(&a[left], &a[keyi]);QuickSort0(a, begin, left - 1); // 左区间序列QuickSort0(a, left + 1, end); // 右区间序列}}
}
2.三位取中法取基准值(重点)
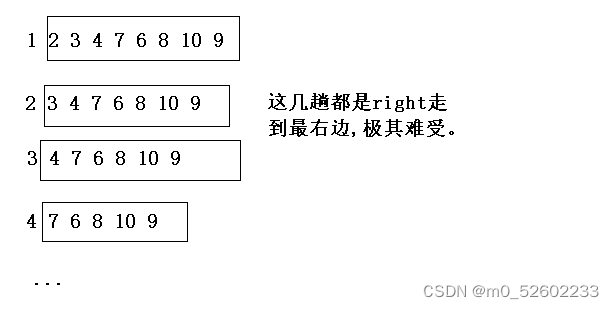
该优化提升非常大,主要是优化对较为有序的数据进行排序的情况。先看例子:一个较为有序的序列 1 2 3 4 7 6 8 10 9 对于这组数据,对于现在没有使用三位取中的快排而言,前面几趟排序是比较难受的。
比如第一趟,right一直不到比key要大的值,找最后搞得–right来到了key的位置,这就导致没有左区间,右区间从2开始,数据越是有序,快排速度越慢,最慢时退化到O(n2)。
解决办法就是不要直接取第一位作为基准值,从begin、mid和end之间选出第二大的值作为基准值。
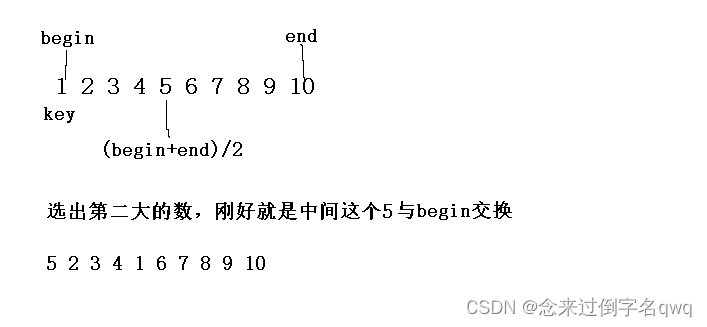
每趟排序前先三位取中做交换,这样就不至于面对这种情况,每趟排序right都走到最右边。
6.2 挖坑法快排
该方法思想与hoare版差不多,算是hoare版的改进,可能更好理解一些,但排序速度比起hoare版没啥大变化,差不多。
void QuickSort2(int* a, int begin, int end)
{if (begin < end){if ((end - begin) + 1 <= RECUR_MAX) {InsertionSort(a + begin, (end - begin) + 1);}else{int midi = MidIndex(a, begin, end);Swap(&a[begin], &a[midi]);int left = begin;int right = end;int key = a[begin];int pos = begin;while (left < right){while (left < right && a[right] >= key) {--right;}a[pos] = a[right];pos = right;while (left < right && a[left] <= key) {++left;}a[pos] = a[left];pos = left;}a[pos] = key;QuickSort2(a, begin, pos - 1);QuickSort2(a, pos + 1, end);}}
}
6.3 双指针法快排
void QuickSort3(int* a, int begin, int end)
{if (begin < end){int midi = MidIndex(a, begin, end);Swap(&a[begin], &a[midi]);int keyi = begin;int pre = begin;int cur = begin + 1;while (cur <= end){if (a[cur] <= a[keyi]) {++pre;Swap(&a[pre], &a[cur]);}++cur;}Swap(&a[keyi], &a[pre]);keyi = pre;QuickSort3(a, begin, keyi - 1);QuickSort3(a, keyi + 1, end);}
}
6.4 非递归快排
需要借助栈实现,本质与递归一样,递归也是栈帧的开辟与销毁。
快速排序的排序速度比较(包含测试代码)
500w个数据,毫秒为单位:
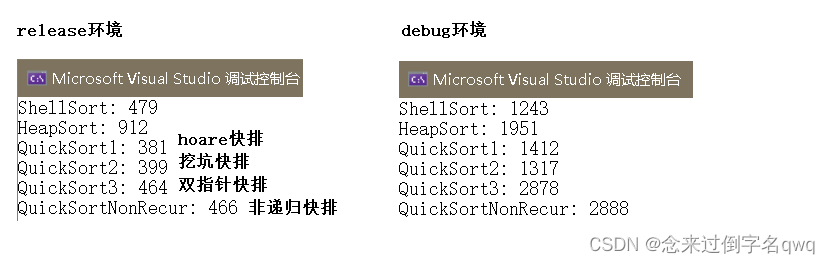
1000w个数据:
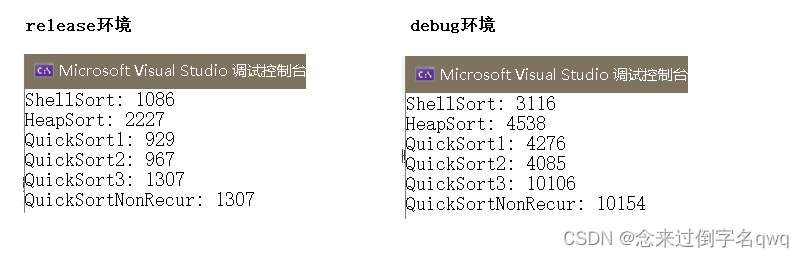
#include "Sort.h"void TestPerformance();int main() {TestPerformance();
}void TestPerformance() {const int N = 10000000;//int* a1 = (int*)malloc(sizeof(int) * N);//int* a2 = (int*)malloc(sizeof(int) * N);int* a3 = (int*)malloc(sizeof(int) * N);//int* a4 = (int*)malloc(sizeof(int) * N);int* a5 = (int*)malloc(sizeof(int) * N);int* a6 = (int*)malloc(sizeof(int) * N);int* a10 = (int*)malloc(sizeof(int) * N);int* a11 = (int*)malloc(sizeof(int) * N);int* a12 = (int*)malloc(sizeof(int) * N);srand((unsigned int)time(0));for (int i = 0; i < N; i++) {//a1[i] = rand();//a2[i] = a1[i];a3[i] = rand();//a4[i] = a1[i];a5[i] = a3[i];a6[i] = a3[i];a10[i] = a3[i];a11[i] = a3[i];a12[i] = a3[i];}//int begin1 = clock();//BubbleSort(a1, N);//int end1 = clock();//int begin2 = clock();//InsertionSort(a2, N);//int end2 = clock();int begin3 = clock();ShellSort(a3, N);int end3 = clock();//int begin4 = clock();//SelectionSort(a4, N);//int end4 = clock();int begin5 = clock();HeapSort(a5, N);int end5 = clock();int begin6 = clock();QuickSort1(a6, 0, N - 1);int end6 = clock();int begin10 = clock();QuickSort2(a10, 0, N - 1);int end10 = clock();int begin11 = clock();QuickSort3(a11, 0, N - 1);int end11 = clock();int begin12 = clock();QuickSort3(a12, 0, N - 1);int end12 = clock();//printf("BubbleSort: %d\n", end1 - begin1);//printf("InsertionSort: %d\n", end2 - begin2);printf("ShellSort: %d\n", end3 - begin3);//printf("SelectionSort: %d\n", end4 - begin4);printf("HeapSort: %d\n", end5 - begin5);printf("QuickSort1: %d\n", end6 - begin6);printf("QuickSort2: %d\n", end10 - begin10);printf("QuickSort3: %d\n", end11 - begin11);printf("QuickSortNonRecur: %d\n", end12 - begin12);
}7. 归并排序(Merge Sort)
这篇关于【数据结构与算法】常见排序算法(Sorting Algorithm)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









