本文主要是介绍41、网络编程/TCP.UDP通信模型练习20240301,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、编写基于TCP的客户端实现以下功能:
通过键盘按键控制机械臂:w(红色臂角度增大)s(红色臂角度减小)d(蓝色臂角度增大)a(蓝色臂角度减小)按键控制机械臂
1.基于TCP服务器的机械臂,端口号是8888, ip是Windows的ip;
查看Windows的IP:按住Windows+r 按键,输入cmd , 输入ipconfig。
2.点击软件中的开启监听;
3.机械臂需要发送16进制数,共5个字节,协议如下
0xff 0x02 x y 0xff
0xff:起始结束协议,固定的;
0x02:控制机械手臂协议,固定的;
x:指定要操作的机械臂0x00 红色摆臂0x01 蓝色摆臂
y:指定角度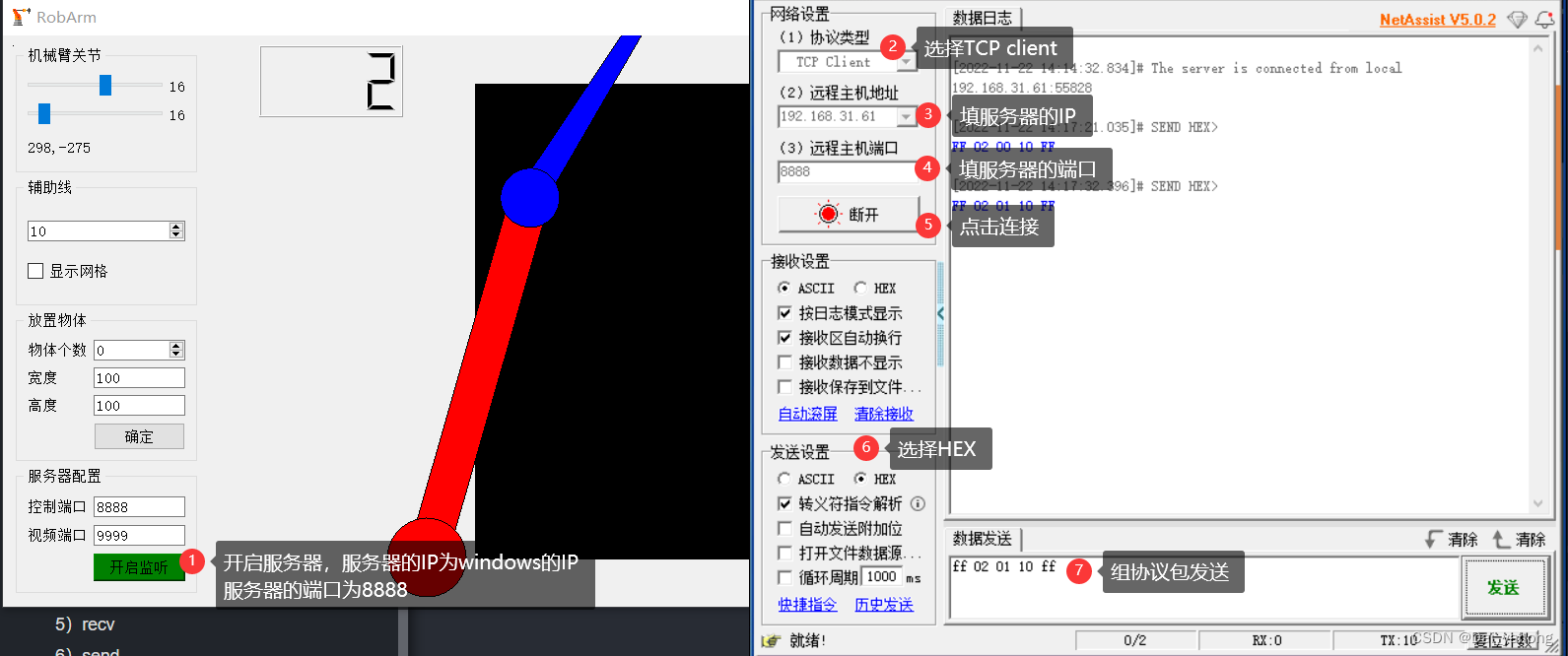
代码:
#include<myhead.h>
#define SER_IP "192.168.125.64" //服务器IP
#define SER_PORT 8888 //服务器端口号
int main(int argc, const char *argv[])
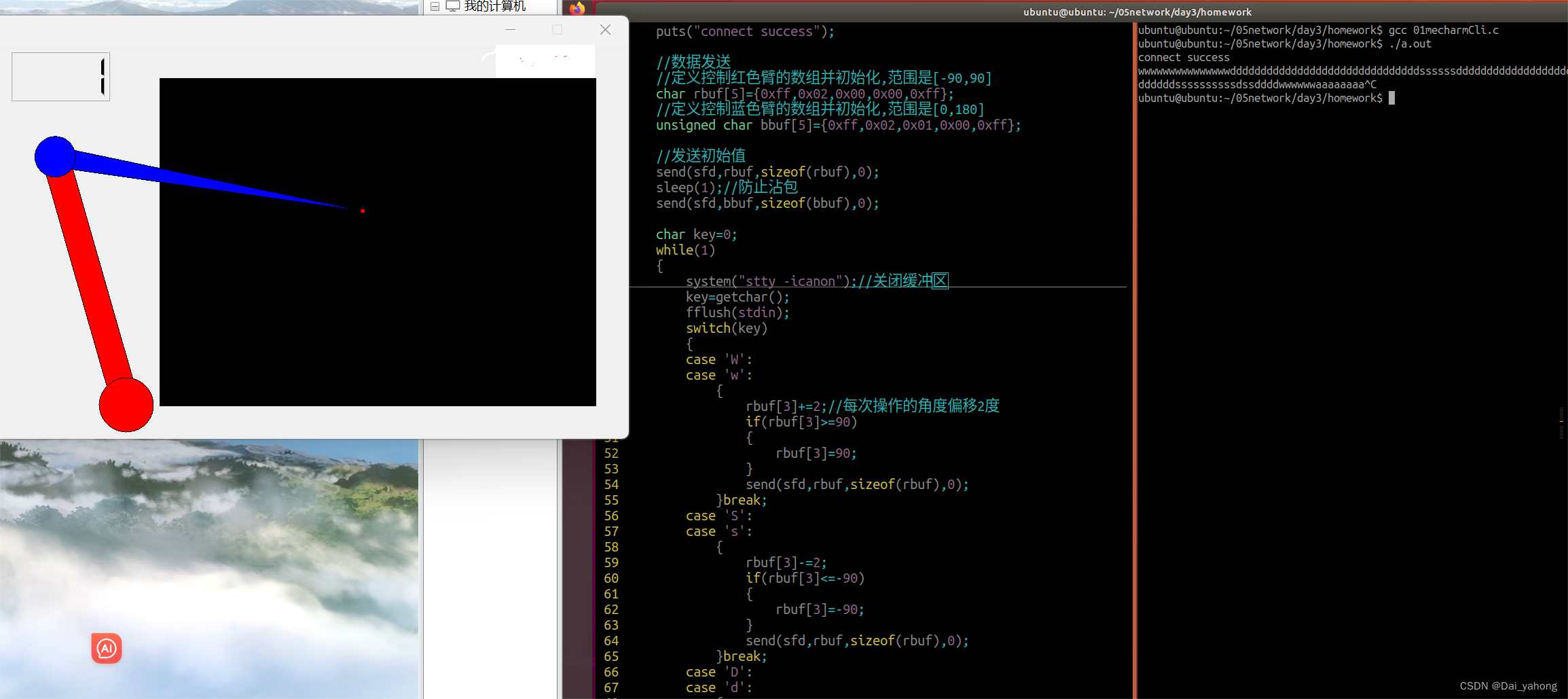
{//创建套接字文件int sfd=socket(AF_INET,SOCK_STREAM,0);if(sfd==-1){perror("socket error");return -1;}//定义结构体存储服务器地址struct sockaddr_in sin;sin.sin_family=AF_INET;sin.sin_port=htons(SER_PORT);sin.sin_addr.s_addr=inet_addr(SER_IP);//连接服务器if(connect(sfd,(struct sockaddr*)&sin,sizeof(sin))==-1){perror("connect error");return -1;}puts("connect success");//数据发送//定义控制红色臂的数组并初始化,范围是[-90,90]char rbuf[5]={0xff,0x02,0x00,0x00,0xff};//定义控制蓝色臂的数组并初始化,范围是[0,180]unsigned char bbuf[5]={0xff,0x02,0x01,0x00,0xff};//发送初始值send(sfd,rbuf,sizeof(rbuf),0);sleep(1);//防止沾包send(sfd,bbuf,sizeof(bbuf),0);char key=0;while(1){system("stty -icanon");//关闭缓冲区key=getchar();fflush(stdin);switch(key){case 'W':case 'w':{rbuf[3]+=2;//每次操作的角度偏移2度if(rbuf[3]>=90){rbuf[3]=90;}send(sfd,rbuf,sizeof(rbuf),0);}break;case 'S':case 's':{rbuf[3]-=2;if(rbuf[3]<=-90){rbuf[3]=-90;}send(sfd,rbuf,sizeof(rbuf),0);}break;case 'D':case 'd':{bbuf[3]+=2;if(bbuf[3]>=180){bbuf[3]=180;}send(sfd,bbuf,sizeof(bbuf),0);}break;case 'A':case 'a':{bbuf[3]-=2;if(bbuf[3]>180)//无符号整数小于零后会向255循环{bbuf[3]=0;}send(sfd,bbuf,sizeof(bbuf),0);}break;}}close(sfd);return 0;
}
运行:
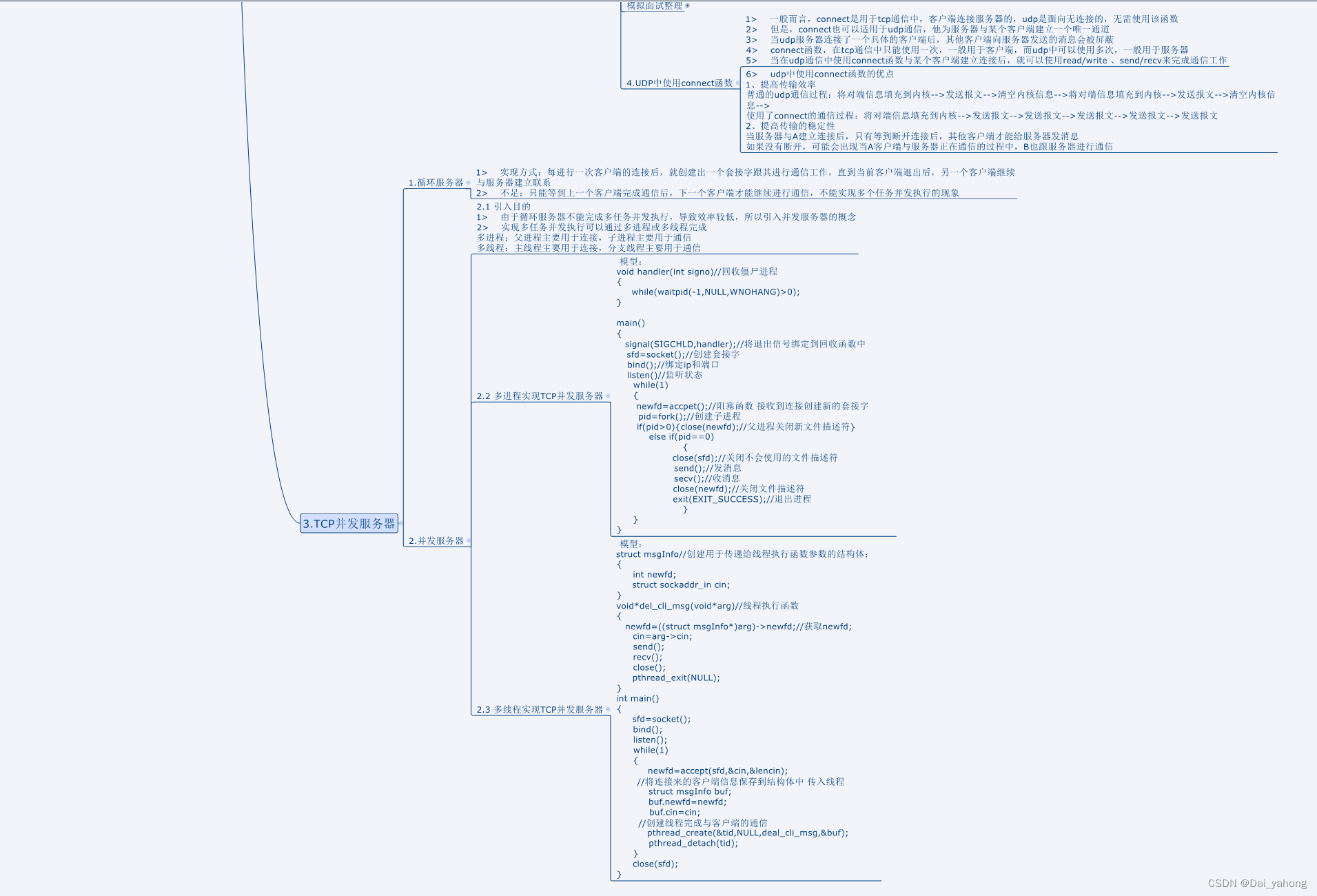
思维导图
这篇关于41、网络编程/TCP.UDP通信模型练习20240301的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







