本文主要是介绍网络摄像头(IPC)介绍:类型、供电、镜头、夜视等,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
IPC(Internet Protocol Camera,网络摄像头),它是一种由传统摄像机与网络技术结合所产生的新一代摄像机。它可以将视频、音频、报警及控制信号通过网络传输,接受网络监控主机(NVR或监控管理平台)的管理。
IPC可与路由器、交换机、NVR等设备组建成为监控系统。
IPC类型

IPC功能
- 视音频编码功能:可以采集数字视音频信号并进行编码压缩;
- 网络传输功能:将编码压缩的视音频信号通过网络进行传输;
- 控制云台、镜头:发出指令,通过网络对前端云台、镜头进行控制;
- 缓存功能:可以把压缩的视音频数据临时存储在本地存储设备中;
- 报警联动功能:能够接受并处理报警输入/ 输出信号;
- 移动视频分析报警功能:能够分析场景内的移动目标,通过比对预设值确定是否报警;
- 视觉参数调节功能:自动对视频的饱和度、对比度、亮度等参数进行调整;
- 编码参数调节功能:通过对视频的帧率、分辨率及码流等编码参数进行调整;
- 系统集成:可以与视频管理平台集成,实现大规模的网络视频监控功能需求。
影响IPC图像效果的几个因素

图像的效果还与ISP调优能力、镜头搭配合理性有较大关系
供电方式

镜头焦距
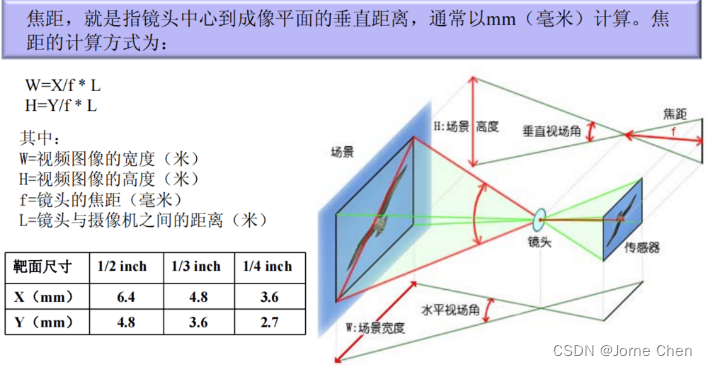
1.1英寸 ——靶面尺寸为宽12mm,高12mm,对角线17mm 1英寸 ——靶面尺寸为宽12.7mm,高9.6mm,对角线16mm 2/3英寸 ——靶面尺寸为宽8.8mm,高6.6mm,对角线11mm 1/1.8英寸——靶面尺寸为宽7.2mm,高5.4mm,对角线9mm 1/2英寸 ——靶面尺寸为宽6.4mm,高4.8mm,对角线8mm 1/3英寸 ——靶面尺寸为宽4.8mm,高3.6mm,对角线6mm 1/4英寸 ——靶面尺寸为宽3.2mm,高2.4mm,对角线4m
IPC镜头焦距有2.8mm/4mm/6mm/8mm/12mm等多种,每个IPC系列均可以选择镜头焦距,可以满足室内外各种环境的拍摄需求。一般来说,焦距越大,视场角越小,而监控距离越远。
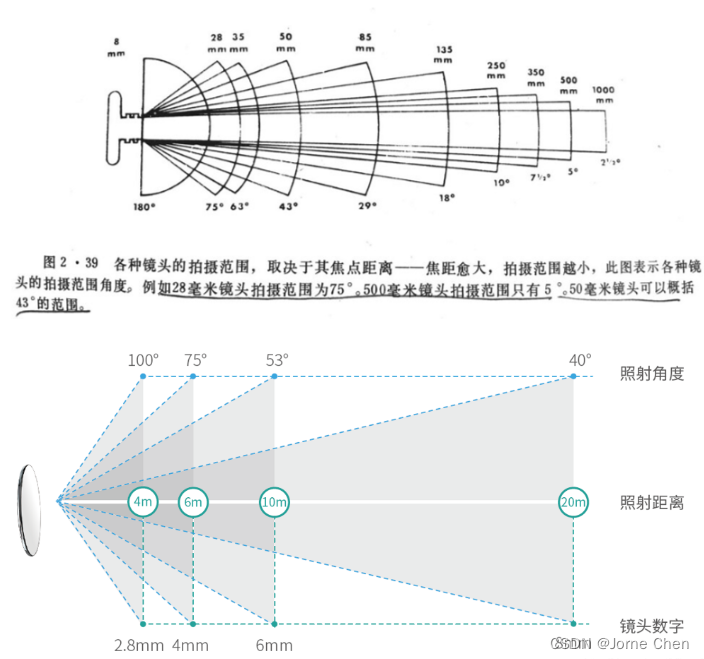
放到实际使用场景中,2.8mm焦距适用于电梯、楼梯等较为狭小的环境,4mm适用于会议室、商店稍大一些的场景等,而停车场、工厂车间、庭院等更开阔的地方则可以选用6mm以上的镜头;具体选择可以根据需要而定。

变焦类型
- 光学变焦:通过调节镜头与传感器之间的距离,来调整焦距
- 数码变焦:通过调节成像面积的大小,产生相当于调节焦距的效果。数码变焦仅是单纯的把图像放大,清晰度缺有所降低。
聚焦类型
- 手动聚焦:通过镜头上的聚焦环进行手动操作
- 自动聚焦:通过镜头本身的精密计算,在图像发生变化时,进行自动聚焦
分辨率
对于监控摄像机来说,清晰度很关键。众所周知,摄像机的分辨率越大、传感器像素越高,拍出来的图像就越清晰。常见的有100万、130万、200万、300万、400万和500万,对应的分辨率如下表:

2010年高清元年推出的还只是720P高清网络摄像机,一直到2012年,主流安企高清网络摄像机还是以130万和200万为主,300以上像素还很少。随着CMOS技术的引入,高清摄像机快速发展,300万、400万、500万、600万、1200万像素的摄像机像雨后春笋一般冒上来,这就是技术的创新带来了产品体系的创新。
目前以4K、8K为代表的超高清成为各厂家的标配。对用户而言,4K不仅仅是对视觉的体验和享受,而是4K的分辨率是1080P的4倍,如果用4K摄像机和1080P摄像机拍摄相同视场角下的同一场景,4K摄像机会用4倍于1080P摄像机所用的信息量去还原场景,画面自然更清晰、更贴近真实。从"用"的角度来讲,由于4K画面的信息量是1080P的四倍,基于更多的信息量,就能实现更准确的智能分析,4K一旦大规模部署,智能分析的准确率就能上升一个台阶,而且也会有更丰富更令人惊喜的智能应用得到实现。
夜视距离
夜视距离主要由红外灯数量决定。单灯的夜视距离为30米,双灯的夜视距离为50米,四灯的夜视距离为80米。
Sony Exmor
Exmor - Wikipedia
SNR1s
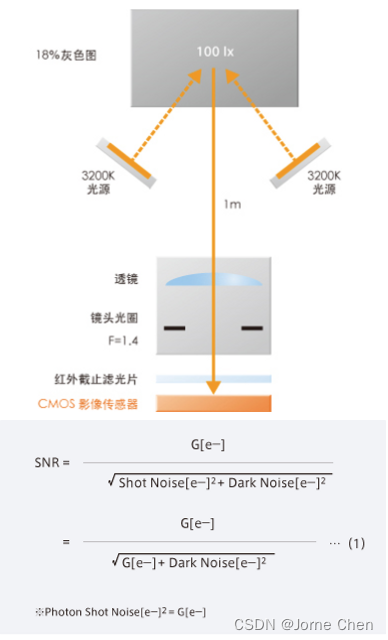
作为用于安防相机领域的CMOS图像传感器,低照度时的画质一直是其最被重视的性能。SNR1s [lx] : 该数值越小,表明在低照度下的画质越出色。
为此,索尼独树一帜地提倡并导入SNR1s的概念用于定量地评价低照度时画质的性能,使其作为仅针对安防相机领域应用的重要指标。
SNR1s的单位为[lx],该数值越小,则说明图像传感器在低照度下的画质表现越出色。
SNR1s中的SNR为“信噪比(Signal to Noise Ratio)”之意,1表示“信号与噪声的比例在该亮度下为1:1”,s则意为“安防用途专用(for Security)”。
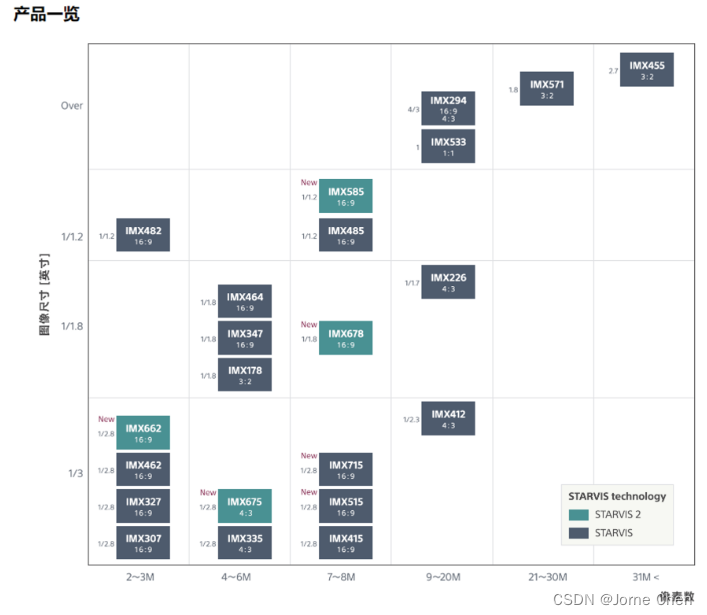
SONY 安防系列图像传感器
| 型号 | 分辨率(MP) | 图像尺寸(英寸) | 单位像素尺寸(um) | 输出接口 | SNR1s |
|---|---|---|---|---|---|
| IMX585-AAQJ1 | 8.2 | 1/1.2 | 2.9 | MIPI CSI-2 | 0.17 |
| IMX485LQJ1 | 8.2 | 1/1.2 | 2.9 | MIPI CSI-2 | 0.18 |
| IMX464LQR1 | 4.1 | 1/1.8 | 2.9 | MIPI CSI-2 | 0.18 |
| IMX482LQJ1 | 2 | 1/1.2 | 5.8 | MIPI CSI-2 | 0.07 |
| IMX662-AAQR1 | 2 | 1/2.8 | 2.9 | MIPI CSI-2 | 0.17 |
| IMX415-AAMR | 8.2 | 1/2.8 | 1.45 | MIPI CSI-2 | 0.52 |
| IMX335LLN | 5 | 1/2.8 | 2 | MIPI CSI-2 | 0.33 |
| IMX385LQR | 2.13 | 1/2 | 3.75 | MIPI CSI-2 | 0.13 |
夜视IPC


照度,即光照强度,是一种物理术语,指单位面积上所接受可见光的能量。单位:勒克斯Lux,简作Lx。安防行业所说的照度,用Lux表示。
行业内公认0.001Lux及以下称之为星光级摄像机,目前广泛应用于平安城市、金融、酒店楼宇、平安村居、港口、高速公路等项目中,无需大规模安装补光照明设施,就可以得到较好的夜间高清彩色监控画面需求。星光级照度监控技术主要受镜头、图像传感器、后端图像处理技术等因素的影响,各安企厂家也都是从利用大光圈镜头、选用大靶面传感器以及良好的图像处理技术等几个方面等几个方面进行提升。
当前出现了以AI超微光技术为代表,通过对应用场景目标图像要求的提炼,采集了海量夜间低照情况下车辆卡口、车辆电警、人员卡口以及全结构化摄像机的图像样本与模拟数据,并针对性的进行了数学建模,设计了一套从采集、标图、训练以及模型转化的端到端的深度学习模型。另外还有超星光、黑光、极光等技术。
微光,一般是指相机/摄像机采用微光成像类器件:像管、EMCCD、ICCD/ICMOS,工作照度都是能达到10-4lx以下的。
微光摄像机是微光下工作的高灵敏度电视摄像机。可利用微光、月光或火气辉光在目标上产生的照度,进行增强,并显示成可见的图像。该系统的核心是微光摄像管。微光摄像管可分成三段:(1)成像段,包括像增强器与摄像管,可将入射的光学像转换成电子像,并聚焦于靶面上;(2)电荷储存腔,可产生二次电子电导,形成放大的正电荷图样;(3)读出枪,形成电子束并扫描靶面,输出信导。经其它工作部分显山图像。可用于微光摄像,如地面微光摄像作战场监控、坦克微光瞄准及机载侦察、照相等。
低照度,一般指摄像机成像器采用低照度CCD/CMOS,其工作照度一般在10-2~10-3lx,最低很难下探到10-4lx级。
低照度摄像机是指在较低光照度的条件下仍然可以摄取清晰图像的监控摄像机。
高动态范围(HDR)
在描述一个场景的时候,动态范围(Dynamic Range)指的是其最亮部分与最暗部分的亮度比值。高动态范围的场景(High Dynamic Range Scene)指的是场景里同时存在非常明亮和非常暗淡的部分。
- 软件实现:多帧异曝光
iPhone4S首次引入,通过调节曝光时间来获得不同曝光的画面,最终通过多张不同曝光的图片来把整个动态范围包围起来,因此也被称作包围曝光(Bracketing)。基本思路是“取长补短,合为一个”,实现暗处能看见,亮处有细节,每个部分都清晰可见的效果。
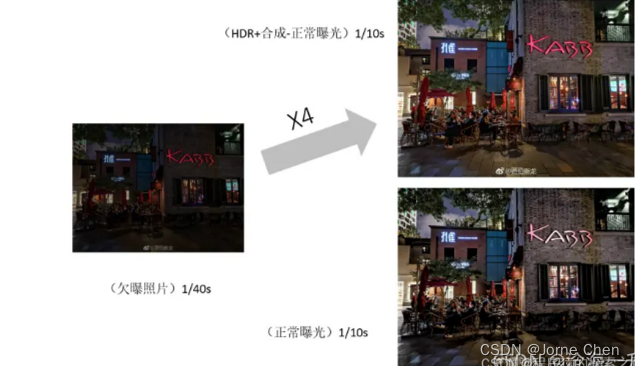
- 软件实现:多帧同曝光(HDR+)
谷歌提出,核心思路是捕获曝光不足的帧,对齐和合并这些帧以产生高比特深度的单个中间图像,并对该图像进行色调映射以产生高分辨率照片。达到“高光不过曝,暗处有细节”的效果。华为超级夜景使用此技术。

- 硬件实现:四像素拜尔阵列QHDR,sony和ov
这种特殊的排列不是为了扩充像素数,而是进行单次多张HDR。按分区进行不同时长的曝光。比如所有标号为 1 的像素曝光 1/25 秒,所有标号为 2 的像素曝光 1/20 秒,所有标号为 3 的像素曝光 1/15 秒,所有标号为 4 的像素曝光 1/10 秒,相当于在这块传感器的一个拍照周期上执行了 4 次明暗各异的曝光,获得了 4 张图片。然后用 HDR算法合成为最终图片。
- 硬件实现:隔行曝光iHDR(interlace HDR)
CMOS成像是一行一行扫描的,而iHDR技术的原理,以完整的RGGB拜尔排列作为一行,对其设置交错改变的曝光参数。比如奇数行长曝光,偶数行短曝光。扫描过程就是从上到下读完奇数行,然后再从上到下读完偶数行,使每一行都被读取(扫)一遍。
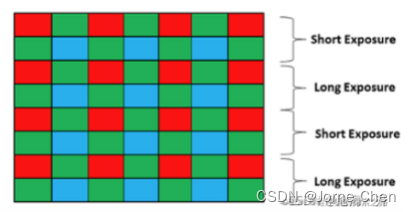
但是iHDR的问题就在于,在列方向会损失一半的分辨率。这个很好理解,iHDR用奇数行与偶数行合成为一行,从而得到HDR照片,每行像素数不变,总行数只有拍摄时的一半。因此,运用iHDR技术的设备在开启HDR功能的时候是会掉画质的。不过好在人眼对纵向分辨率的增减没有像横向分辨率那样敏感,只要不是细密斜向线条,人眼都不能明确的感知到画质下降。
- SONY HDR
固定设置的监控摄像头需要配合因时间段、状况而变化的光线条件,使摄像头始终适应照明的变化。有时会出现过亮与过暗部分同时存在的情况,此时,过亮处可能会过度曝光,而过暗处会出现暗部模糊。为了在明暗两种场景中都能清晰拍摄被摄体,调整曝光时间或增益,拍摄没有过度曝光和暗部模糊的图像的方法就是高动态范围功能。

- DOL HDR功能:图像传感器将配合暗处设定较长曝光时间并配合亮处设定较短曝光时间,再以细微的时间差分别获取图像数据,进行输出。在后段处理中进行合成。这一功能分别拍摄暗处与亮处的最佳图像,再进行合成,相比单次曝光,获取的图像更能保证动态范围。这种方法在拍摄静态被摄体时效果尤其显著。但是由于2张图像有细微的时间差,因此,在拍摄高速运动的被摄体时,有时会发生运动部位出现色差等伪影现象。
- Clear HDR功能:图像传感器会配合暗处设定较高增益并配合亮处设定较低增益,同时获取图像,再进行输出。合成在后段处理中进行。这一功能分别拍摄暗处与亮处的最佳图像,再进行合成,相比单次曝光,获取的图像更能保证动态范围。这种方法同时获取2张图像,因此即使是高速运动的被摄体也能拍摄出没有伪影的图像,也适合AI处理等。

STARVIS/ STARVIS 2
暗处的清晰拍摄技术对于监控摄像头而言是不可或缺的。搭载索尼STARVIS/ STARVIS 2技术的图像传感器,具备超越人眼的感光度,不仅能捕捉暗处被摄体的形状,连质感也能真实再现,将在低照度条件下的监控用途上发挥巨大威力。
STARVIS和STARVIS 2都是应用于安防方面的CMOS图像传感器背照式像素技术。1μ㎡具有2000mV以上(彩色规格产品、706cd/㎡ 光源成像时、F5.6、按曝光时间1s换算)的感光度,除了可见光领域,还覆盖了近红外领域,可实现画质优异的成像效果。STARVIS 2不仅具备上述性能,与相同像素尺寸的STARVIS相比,单次曝光时的动态范围提升了8dB以上(AD 12bit)。
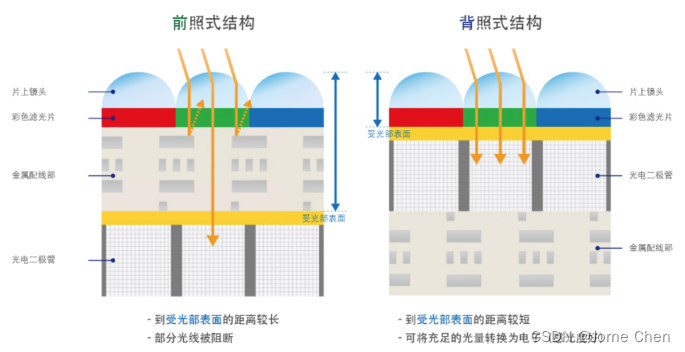
搭载STARVIS/STARVIS 2技术的图像传感器采用背照式结构,不同于前照式的图像传感器,不会受到配线、电路等障碍物的影响,能将更多光线收集到光电二极管中,因此可实现高感光度。并且,由于采用了专为监控摄像头开发的像素,即使在暗处,对于人眼和传统相机难以识别的被摄体的颜色、形状、质感、甚至指针指向的数字都能清晰捕捉。
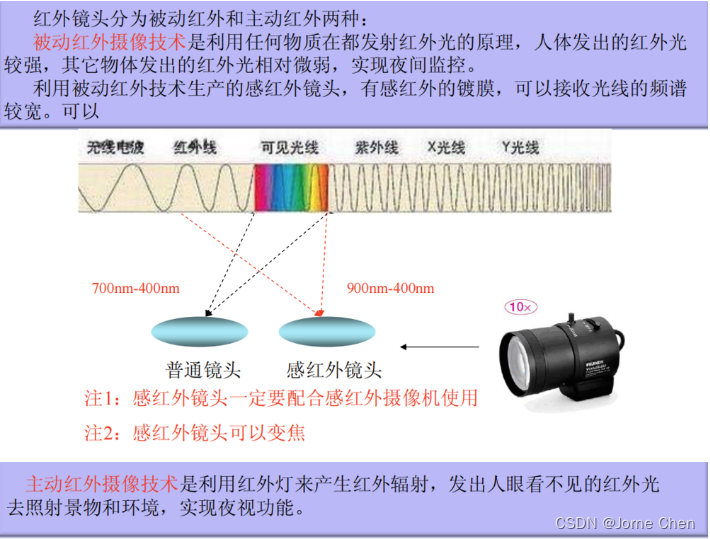
在近红外领域(NIR)的拍摄性能
普通相机的拍摄以可见光照明为前提,但在安防应用中,有时需要在近红外领域(NIR Near Infra-red)的拍摄性能。索尼安防类图像传感器当前的所有型号,在完全暗处,都可以凭借近红外光的照射,实现更高品质的NIR成像。
- NIR拍摄的车牌


靶面尺寸和接口
- 镜头的靶面尺寸应等于或大于sensor尺寸
- 镜头的接口和摄像机的接口相匹配
- 一款镜头只可能有一种接口,一般1/3英寸的大都是CS接口,1/2英寸的大都是C接口
- 大多数相机镜头都是CS/C兼容,附件中含垫圈,加上接圈后可以接C接口镜头
- C 后截距17.5mm,CS 后截距12.5mm
- C接口,直接配C镜头,无法配CS镜头
- CS接口,直接配CS镜头,加接圈配C镜头
信噪比
当光线昏暗时,很容易看到摄像机画面中雪花状的干扰噪点,干扰噪点的强弱与摄像机信噪比指标的好坏有直接关系。信噪比的单位是分贝(dB),信噪比越高,干扰噪点对画面的影响就越小 ,成像质量越好。信噪比的典型值一般在45dB-55dB之间,也有高于60dB的高信噪比摄像机。
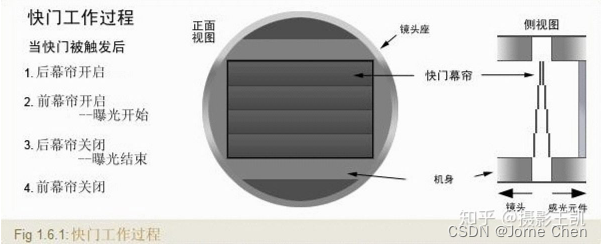
电子快门
sensor曝光时间+帧周期计算
电子快门,指CCD传感器的曝光时间。电子快门包括低速快门和高速快门,低速快门主要用于拍摄光线昏暗的场景,而高速快门用于拍摄高速运动的物体。
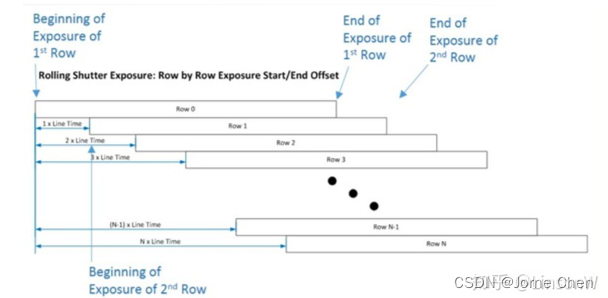
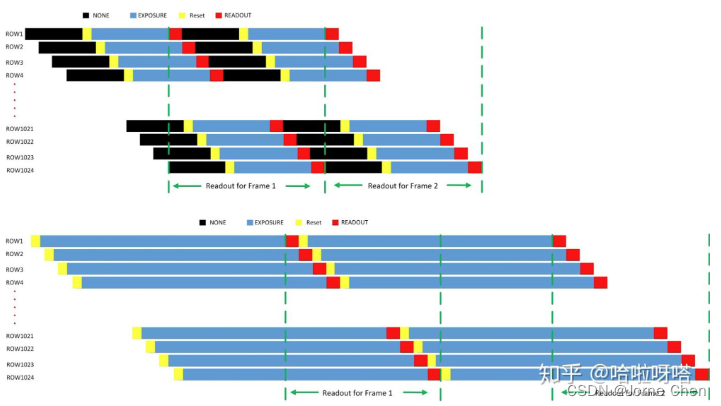
- 卷帘快门(Rolling Shutter)
卷帘快门通过对每列像素使用A/ D来提高读取速度,每列像素数量可达数千。任何一个转换器数字化的像素总数显著减少,从而缩短了读取时间,从而缩短了帧速率。虽然有许多并行A/ D共享工作负载,但整个传感器阵列仍必须转换为一个一次排。这导致每行读出之间的时间延迟很小。不是等待整个帧完成读出,以进一步最大化帧速率,每个单独的行通常能够在完成前一帧的读出后开始下一帧的曝光。快速时,每行读数之间的时间延迟转换为每行开始曝光之间的延迟,使它们不再同时发生。结果是帧中的每一行将暴露相同的时间量,但在不同的时间点开始曝光,允许两帧的重叠曝光。最终帧速率取决于滚动读出过程的完成速度。一个典型的读取过程如下所示:
CMOS图像阵列的图形描述如图2。每行中的QRS晶体管的栅极都将连接到像素阵列左侧的行选择电路,从而允许控制哪一行像素应连接到列放大器。在阵列的顶部,所有源极跟随器输出将通过行选择晶体管连接到列放大器。为了产生数字数字,来自列放大器的信号被提供给模数转换器,该模数转换器对于所有列放大器是通用的,或者为了提高转换速度,为每列复制
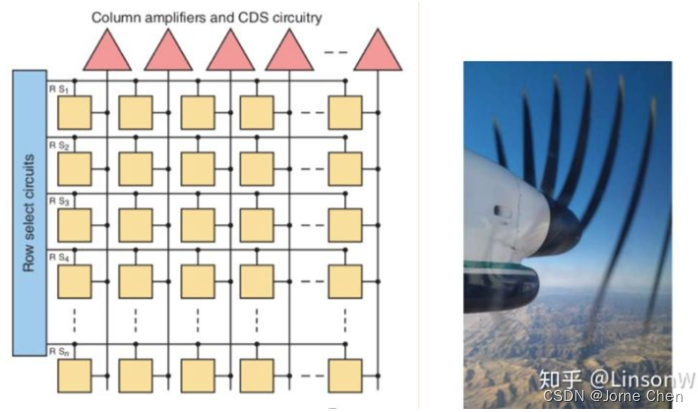
现在通过激活要读取的行的行选择信号来执行CMOS图像传感器的读出过程,该行选择信号将该行的像素连接到列放大器。读出是两步过程,首先读出浮动扩散复位后的信号,并将其存储在列级的采样和保持电路中。在此之后,立即读出光信号并减去复位信号,然后由ADC将结果转换为数字编号并从传感器读出。
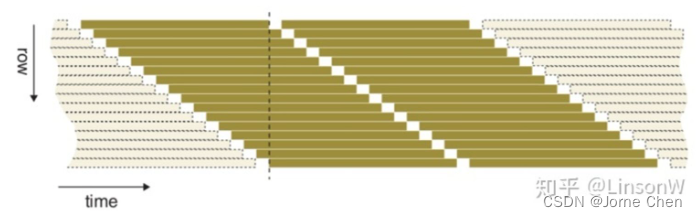
由于行是按顺序读出的,因此在阵列上累积的每一行的积分之间会有一段时间延迟。如图3左所示。该卷帘快门是CMOS图像传感器的特征,其在包含移动物体的图像中引入失真。失真量将取决于诸如帧速率(每秒捕获的帧数)以及移动物体的速度和方向等因素。当手机或物体移动时,手机拍摄的视频中出现的“果冻”印象是由于这种现象造成的。
两种overleap(取决于曝光时间与单行读出时间*行数的关系)
- 全局快门(Global Shutter)
和卷帘快门相比,全局快门(global shutter)最主要的区别是在每个像素处增加了采样保持单元,在指定时间达到后对数据进行采样然后顺序读出,这样虽然后读出的像素仍然在进行曝光,但存储在采样保持单元中的数据却并未改变。这种结构的主要缺点在于增加了每个像素的元件数目,使得填充系数降低,所以高分辨率的sensor设计难度和生产成本都很高,另外采样保持单元还引入了新的噪声。
CCD相机通常在全局快门(global shutter)模式下使用行间传输CCD。 在全局快门模式下,每个像素在同一时刻同时曝光。 当图像逐帧变化时,这尤其有用。 然而,当涉及帧速率时,CCD具有固有的缺点。 曝光完成后,来自每个像素的信号被串行传输到单个模数转换器(A / D)。CCD的最终帧速率受到单个像素传输然后数字化的速率的限制。 传感器中传输的像素越多,相机的总帧速率就越慢。
自动增益控制(AGC)
摄像头内有一个将来自CCD的信号放大的视频放大器,其放大量即增益。具有自动增益(AGC)功能的摄像机,在低照度时的灵敏度会有所提高,但此时的噪点也会比较明显。这是由于信号和噪声被同时放大的缘故。
背光补偿
背光补偿,它可以有效补偿摄像机在逆光环境下拍摄时目标物体发黑的缺陷。 背光补偿的原理就是根据特定的测光区域,调整电子快门(或自动光圈),使得测光区域内的曝光值正常。
宽动态就是场景中特别亮的部位和特别暗的部位同时都能看得特别清楚。宽动态范围是图像能分辨最亮的亮度信号值与能分辨的最暗的亮光信号值的比值,单位是分贝(dB)。 宽动态主要是通过双速CCD来实现的,在同一时间内,用高速快门拍较亮区域,用低速快门拍较暗的区域,再将图像合成。

坏点抑制技术(DSP)
对热噪点(亮点)和冷噪点(黑点)进行抑制。
智能分析
摄像机从2011年推出的移动侦测、视频遮挡等两三个智能分析功能,发展到如今,几乎所有的主流厂家摄像机标配的智能功能都超过10余种,当然目前这些智能功能的标配绝大多数仅局限于中高端行业产品中。
- 诊断类智能分析。摄像机的诊断类智能分析主要是针对视频图像出现的黑屏、模糊、云台失控、画面冻结等常见的摄像头故障、视频信号干扰如场景变更、物品遗留/消失等进行准确分析、判断和报警。
- 行为类智能分析。摄像机该项技术侧重于对动态场景的分析处理。典型的功能有:车辆逆行、防区入侵检测、人员聚焦检测、绊线穿越检测、快速移动、人员徘徊检测和客流统计等。
这篇关于网络摄像头(IPC)介绍:类型、供电、镜头、夜视等的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







