本文主要是介绍计算机图形学课程笔记Lecture2 transformation,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
变换
- 2D transformation
- 引入齐次坐标,表示平移
- 3D变换MVP
- 罗德里格旋转公式
- view/camera transformation(观测变换)
- projection transformation
why study?
modeling,:translation,scale,rotation
viewing;3D to 2D projection
一个再复杂的变换,我们最重要最关心的是, 从原来的坐标变换的新的坐标位置;这也是很多变换推导的基础!
2D transformation

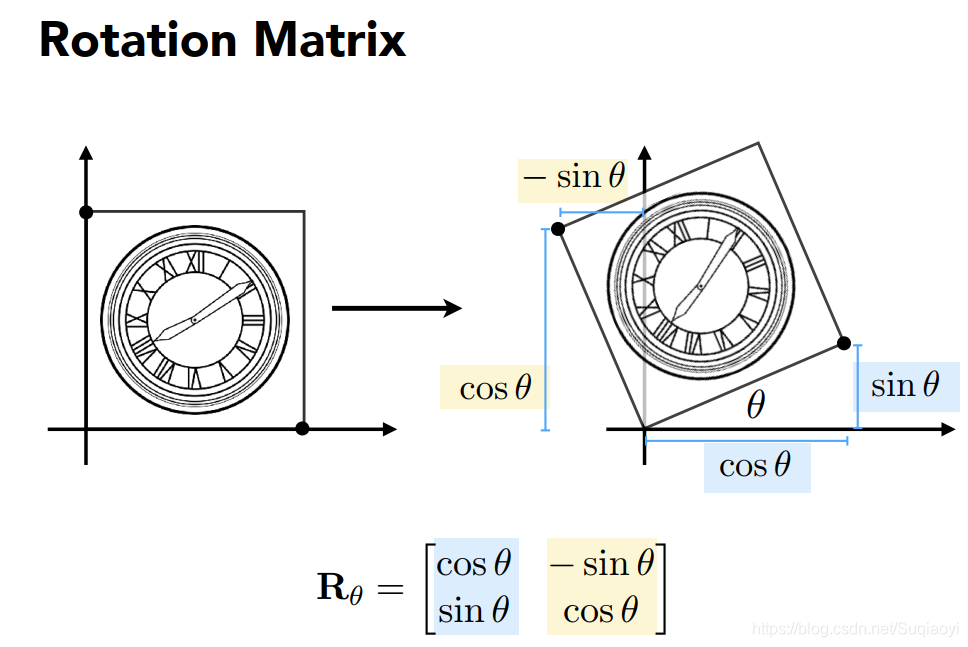
这个地方的旋转矩阵参数完全没有必要死记硬背,其实理解原理很关键:
可以根据特殊点的旋转求取对应的参数。

引入齐次坐标,表示平移


仿射变换
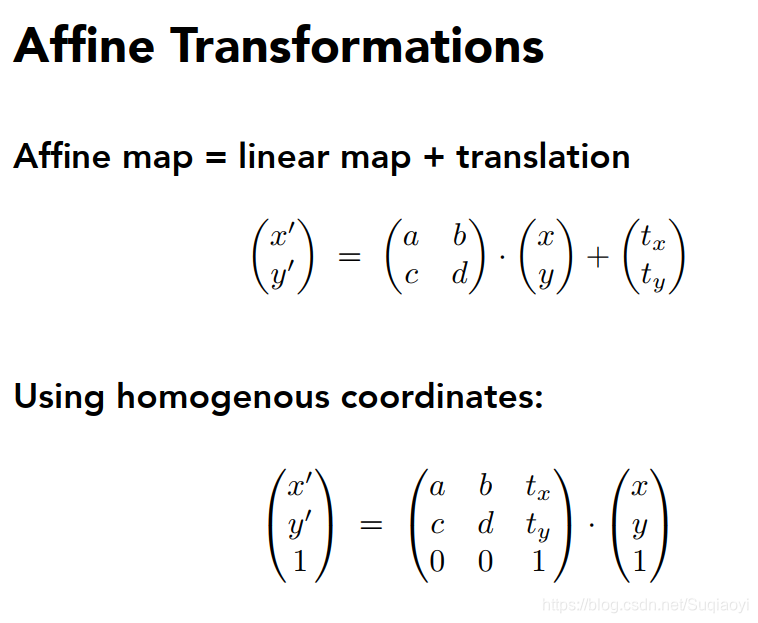

复杂变化中,每一步变化过程顺序不能错!
3D变换MVP
罗德里格旋转公式
这个公式的推导很重要的一点在于:
向量的叉积可以表示为矩阵*向量的形式:
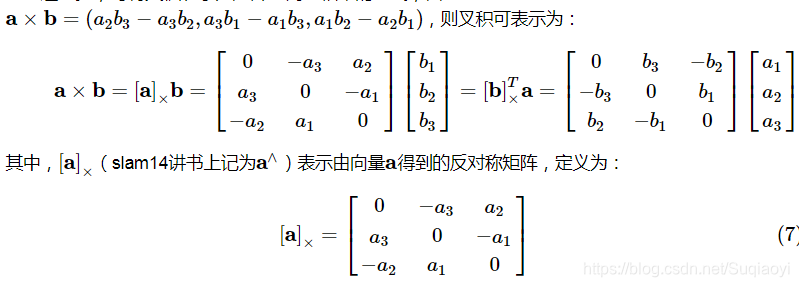
具体的推导过程:这篇博客写的很好
https://www.cnblogs.com/wtyuan/p/12324495.html
view/camera transformation(观测变换)
model,view经常放在一起说~

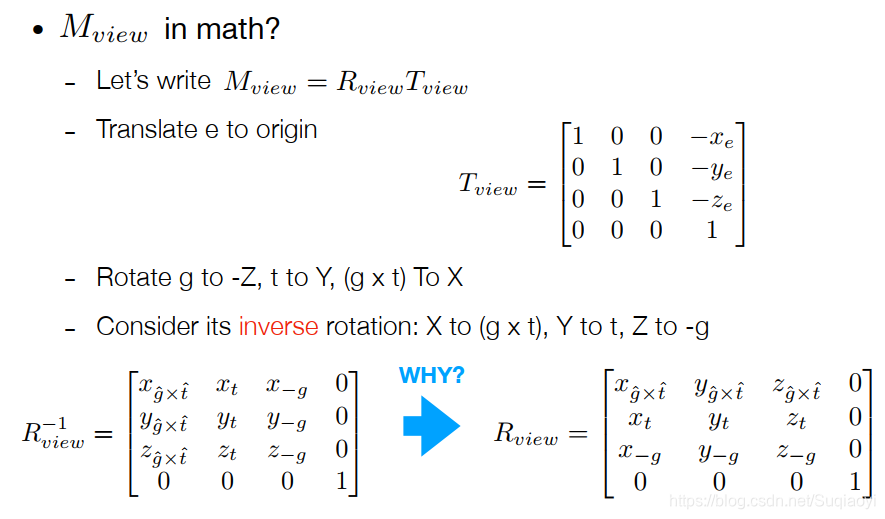
为啥矩阵长这样?
还是很简单,通过(1,0,0)这些特殊点的旋转变换验证准确性!
projection transformation
perspective projection透视投影
注意两个点:
近平面和远平面的z是不变的!

这篇关于计算机图形学课程笔记Lecture2 transformation的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








