本文主要是介绍电机控制常见的外围器件,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
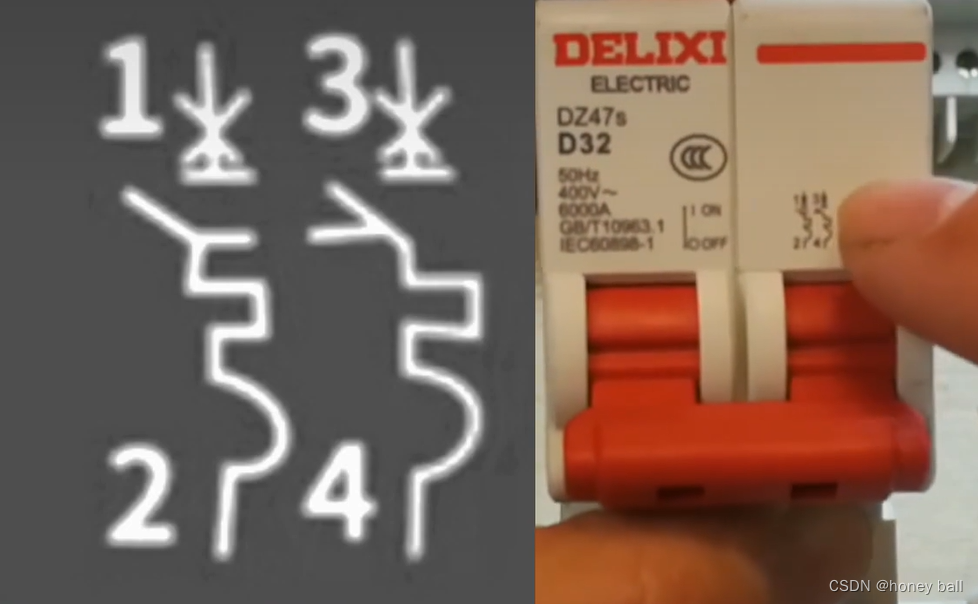
小型断路器:
这些通通都叫小型断路器,二十年的老电工不一定都认识,不信看看_哔哩哔哩_bilibili
1PIN 2PIN 3PIN 4PIN:

正常情况下火线和零线的电流是相等的,但是漏电的情况下,两线的电流差值大于30毫安,漏电保护器就会跳闸。每一个月按一下黄色按钮用于检验是否可以正常跳闸。按完黄色按钮后再按右下角蓝色按钮复位。有些漏电保护器在黄色按钮上方多一个N接口(接入零线),这种与不加N的区别是他在断电的情况下零线不断电。

这个图形符号表明是空气开关
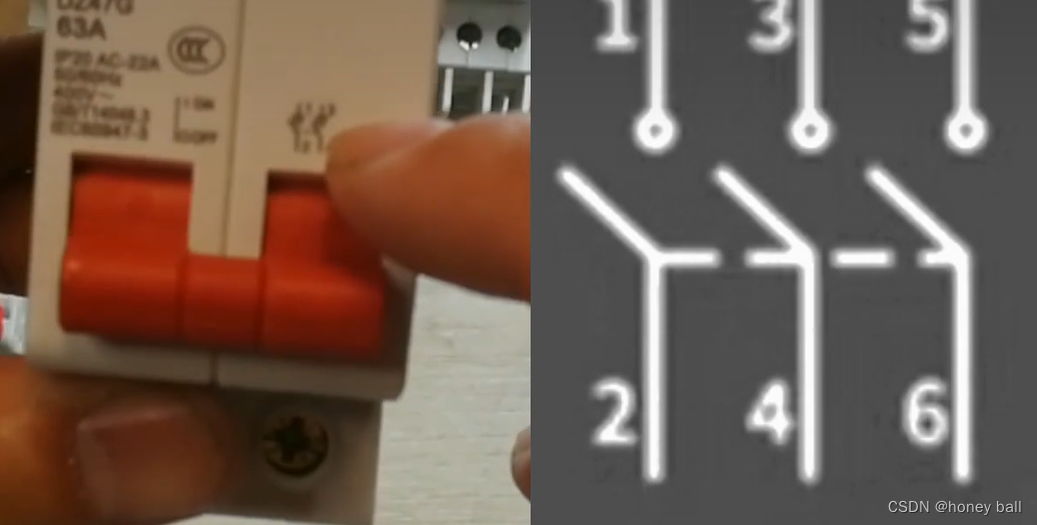
这种符号不是空气开关,是隔离开关。隔离开关只有通断功能,没有任何的保护功能。空气开关用于负载上面,隔离开关一般用在电源上面,仅做开关使用。
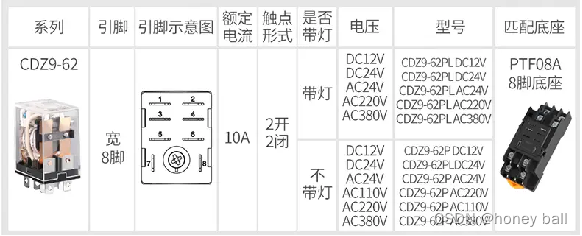
中间继电器:
低压开关,控制高压,跟小型继电器一个逻辑。
电工不知道中间继电器作用,电工一辉实操接线。直流控交流接触器_哔哩哔哩_bilibili

火线和零线和地线和COM的含义:
火线零线和地线到底有什么区别?接地接到哪了?_哔哩哔哩_bilibili
开关或者保护应该接到火线上这样即使漏电人和大地和零线上电平一致不会产生电势差。但是当火线如触水碰到外壳的时候此时外壳仍然会有电的,所以工业等场景会使用三相插头。
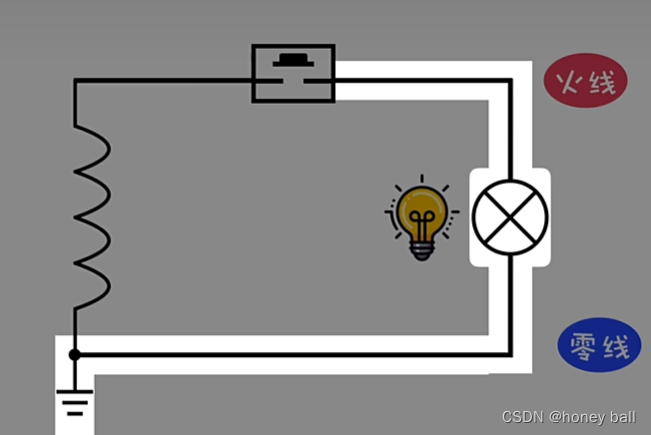
零线是从三相发电机的公共点引出来的,零线没有电流但有电压。
零线到底是有电还是没电?_哔哩哔哩_bilibili

三相电是相位两两相差120度的三个正弦波,插头上三个引脚是零线,火线,和地线。
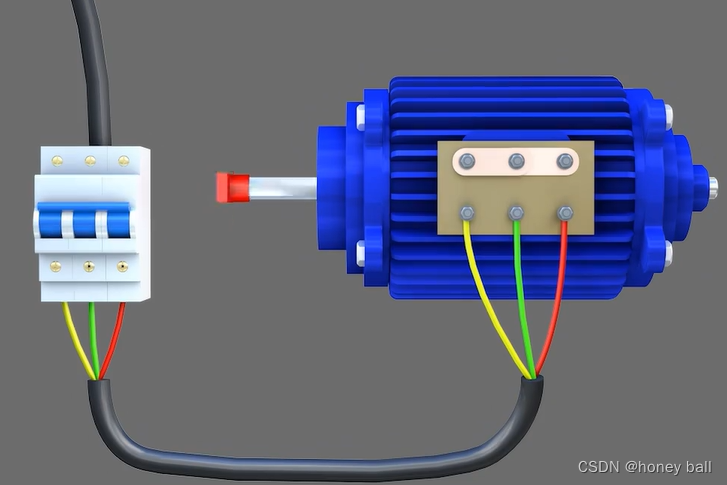
三相电机缺相会出现什么情况_哔哩哔哩_bilibili
三相电机A B C三相插电即转。
三相电机不需要六步换相而是可以直接接三相电控制,这是由三相电机的工作原理所决定的。三相电机的工作原理基于三个交流电流之间的相互作用。这三个交流电流分别代表三个相位,即A相、B相和C相,每个相位的交流电波相位相差120度。
三相电机通常采用传统的电机控制方式,如降压启动和变频调速。而无刷电机的控制则更加复杂,一般采用PWM技术,通过控制电机的电流和电压来实现电机的转速、转矩等参数调节。
当这三个相位的电流交替进行供电时,它们能够相互补充,产生一个连续的旋转磁场。这个旋转磁场通过三相电机中的转子来感应,从而在转子中产生电流,使转子开始旋转。这种旋转是连续的,不需要进行六步换相。
因此,三相电机只需要接入三相电源,就可以通过控制三相电流的交替供电来实现电机的连续旋转,而不需要进行复杂的换相操作。这种简单而有效的设计使得三相电机在工业和其他领域得到广泛应用。
三相电机接三相电通常是可以直接运转的,但这取决于电机的具体类型和额定功率。小于20千瓦的电机通常可以直接启动,而大于20千瓦的电机则可能需要辅助启动设备,如变频器,来实现平稳启动。此外,尽管三相电机接三相电后可以运转,但仅仅连接三根火线可能会导致保护不完善。在实际应用中,三相电机通常不直接连接到三相电源上,而是通过控制开关去连接。当电机功率较大时,还会通过连接中间继电器去控制电机运转。这是为了完成三相电机的正、反转功能,并在电机出现过载、短路等异常情况时提供保护
步进电机中的42和57主要指的是电机的安装机座尺寸,分别为42mm和57mm。这两种电机在许多方面都有区别:
步距角:42步进电机的步距角一般为1.8度,而57步进电机的步距角一般为0.9度。这意味着57步进电机可以实现更精细的定位控制。
功率:57步进电机的功率更大,可以满足更高的动力要求,而42步进电机的功率较小,只能满足较低的动力要求。
转矩和速度:57步进电机的转矩和速度都比42步进电机更高,适用于需要高速和高精度控制的场合。而42步进电机则更适用于一些低速、低精度的场合。
步进电机的细分差补什么意思:
步进电机的细分差补是指将步进电机的一个步进角度分成更小的角度来执行,以实现更高的转动精度。这种细分通常是通过驱动模块来实现的,驱动模块内部集成了细分控制芯片,通过选型外部细分数的方式来实现步进电机的细分。不同的驱动模块细分数不同,常见的有16细分、32细分、64细分等
步进电机通过控制脉冲数来控制旋转角度,每个脉冲对应一个步距角。而伺服电机则通过控制脉冲时间来控制旋转角度。
步进电机的阶跃响应是指电机从一个稳定平衡位置到下一个稳定平衡位置的运动过程,也就是过渡过程。这个过程通常包括单调变化和振荡衰减两个阶段。
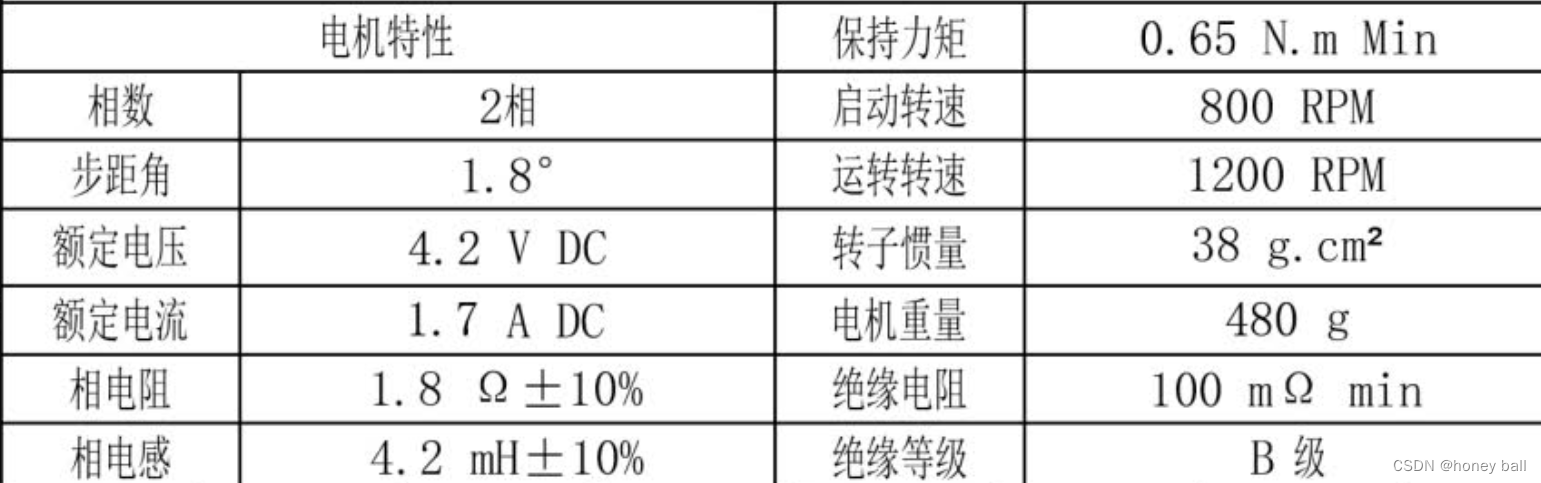
步进电机关键参数:
步进电机的步距角是指输入一个电脉冲信号,步进电动机转子相应的角位移。步距角的大小与电机结构设计有关,通常情况下,步进电机的步距角为1.8度(全步进电机)或0.9度(半步进电机),也有一些特殊型号的步进电机步距角为0.72度、0.36度等。
电工必须知道的按钮开关,终于搞明白了。值得收藏_哔哩哔哩_bilibili
欧姆龙行程微动开关:

这篇关于电机控制常见的外围器件的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




