本文主要是介绍qt-OPENGL-星系仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
qt-OPENGL-星系仿真
- 一、演示效果
- 二、核心程序
- 三、下载链接
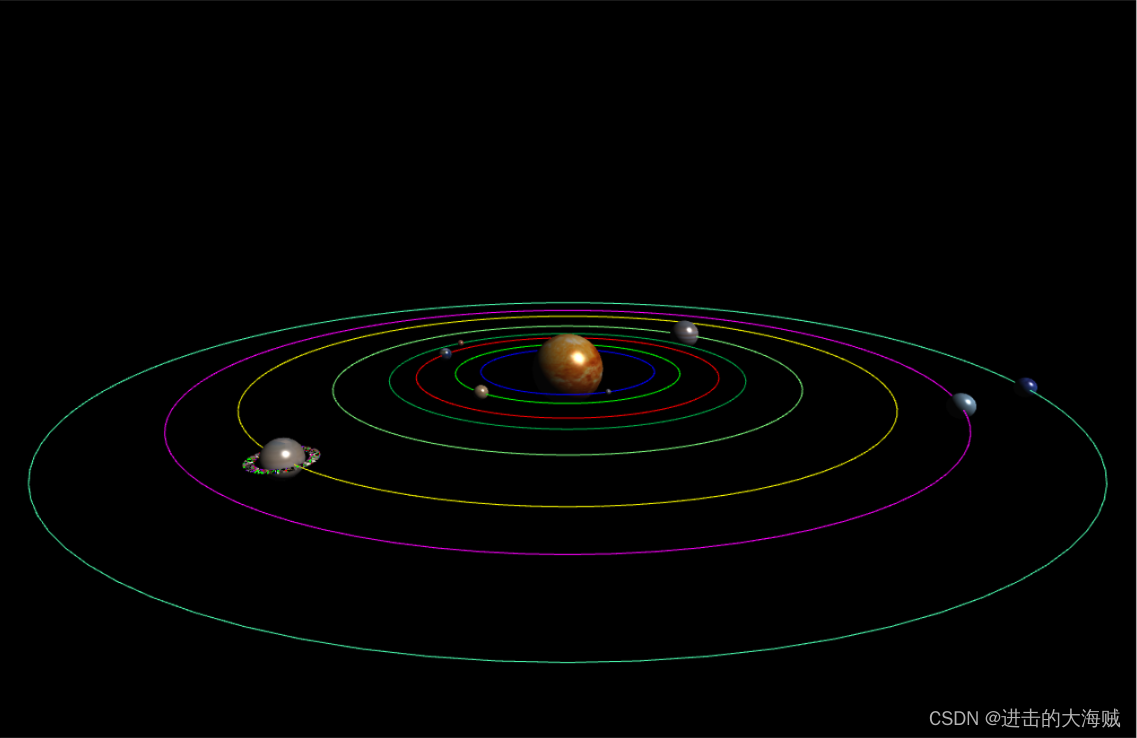
一、演示效果
二、核心程序
#include "model.h"Model::Model(QOpenGLWidget *_glWidget)
{ glWidget = _glWidget;glWidget->makeCurrent();initializeOpenGLFunctions();
}Model::~Model()
{destroyVBOs();
}void Model::destroyVBOs()
{glDeleteBuffers(1, &vboVertices);glDeleteBuffers(1, &vboIndices);glDeleteBuffers(1, &vboNormals);glDeleteBuffers(1, &vboTexCoords);glDeleteBuffers(1, &vboTangents);glDeleteVertexArrays(1, &vao);vboVertices = 0;vboIndices = 0;vboNormals = 0;vboTexCoords = 0;vboTangents = 0;vao = 0;
}void Model::createVBOs()
{glWidget->makeCurrent();destroyVBOs();glGenVertexArrays(1, &vao);glBindVertexArray(vao);glGenBuffers(1, &vboVertices);glBindBuffer(GL_ARRAY_BUFFER, vboVertices);glBufferData(GL_ARRAY_BUFFER, numVertices * sizeof(QVector4D), vertices.get(), GL_STATIC_DRAW);glVertexAttribPointer(0, 4, GL_FLOAT, GL_FALSE, 0, nullptr);glEnableVertexAttribArray(0);vertices.reset();glGenBuffers(1, &vboNormals);glBindBuffer(GL_ARRAY_BUFFER, vboNormals);glBufferData(GL_ARRAY_BUFFER, numVertices * sizeof(QVector3D), normals.get(), GL_STATIC_DRAW);glVertexAttribPointer(1, 3, GL_FLOAT, GL_FALSE, 0, nullptr);glEnableVertexAttribArray(1);normals.reset();glGenBuffers(1, &vboTexCoords);glBindBuffer(GL_ARRAY_BUFFER, vboTexCoords);glBufferData(GL_ARRAY_BUFFER, numVertices * sizeof(QVector2D), texCoords.get(), GL_STATIC_DRAW);glBindBuffer(GL_ARRAY_BUFFER, vboTexCoords);glVertexAttribPointer(2, 2, GL_FLOAT, GL_FALSE, 0, nullptr);glEnableVertexAttribArray(2);texCoords.reset();glGenBuffers(1, &vboTangents);glBindBuffer(GL_ARRAY_BUFFER, vboTangents);glBufferData(GL_ARRAY_BUFFER, numVertices * sizeof(QVector4D), tangents.get(), GL_STATIC_DRAW);glVertexAttribPointer(3, 4, GL_FLOAT, GL_FALSE, 0, nullptr);glEnableVertexAttribArray(3);tangents.reset();glGenBuffers(1, &vboIndices);glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, vboIndices);glBufferData(GL_ELEMENT_ARRAY_BUFFER, numFaces * 3 * sizeof(unsigned int), indices.get(), GL_STATIC_DRAW);indices.reset();
}void Model::drawModel()
{float fixedAngle = -90.0f;modelMatrix.setToIdentity();modelMatrix.translate(position);modelMatrix.rotate(angle, 0.0, 1.0, 0.0);modelMatrix.rotate(fixedAngle, 1.0, 0.0, 0.0);modelMatrix.scale(invDiag * scale, invDiag * scale, invDiag*scale);modelMatrix.translate(-midPoint);GLuint locModel = 0;GLuint locNormalMatrix = 0;GLuint locShininess = 0;locModel = glGetUniformLocation(shaderProgram, "model");locNormalMatrix = glGetUniformLocation(shaderProgram, "normalMatrix");locShininess = glGetUniformLocation(shaderProgram, "shininess");glBindVertexArray(vao);// GL_CHECK(glUseProgram(shaderProgram[shaderIndex]));glUniformMatrix4fv(locModel, 1, GL_FALSE, modelMatrix.data());glUniformMatrix3fv(locNormalMatrix, 1, GL_FALSE, modelMatrix.normalMatrix().data());glUniform1f(locShininess, static_cast<GLfloat>(material.shininess));if (textureID){GLuint locColorTexture = 0;locColorTexture = glGetUniformLocation(shaderProgram, "colorTexture");glUniform1i(locColorTexture, 0);glActiveTexture(GL_TEXTURE0);glBindTexture(GL_TEXTURE_2D, textureID);}glDrawElements(GL_TRIANGLES, numFaces * 3, GL_UNSIGNED_INT, 0);
}void Model::readOFFFile(QString const &fileName)
{std::ifstream stream;stream.open(fileName.toUtf8(),std::ifstream::in);if (!stream.is_open()){qWarning("Cannot open file.");return;}std::string line;stream >> line;stream >> numVertices >> numFaces >> line;// http://en.cppreference.com/w/cpp/memory/unique_ptr/make_uniquevertices = std::make_unique<QVector4D[]>(numVertices);indices = std::make_unique<unsigned int[]>(numFaces * 3);if (numVertices > 0){float minLim = std::numeric_limits<float>::lowest();float maxLim = std::numeric_limits<float>::max();QVector4D max(minLim, minLim, minLim, 1.0);QVector4D min(maxLim, maxLim, maxLim, 1.0);for (unsigned int i = 0; i < numVertices; ++i){float x, y, z;stream >> x >> y >> z;max.setX(std::max(max.x(), x));max.setY(std::max(max.y(), y));max.setZ(std::max(max.z(), z));min.setX(std::min(min.x(), x));min.setY(std::min(min.y(), y));min.setZ(std::min(min.z(), z));vertices[i] = QVector4D(x, y, z, 1.0);}midPoint = QVector3D((min + max) * 0.5);invDiag = 1 / (max - min).length();}for (unsigned int i = 0; i < numFaces; ++i){unsigned int a, b, c;stream >> line >> a >> b >> c;indices[i * 3 + 0] = a;indices[i * 3 + 1] = b;indices[i * 3 + 2] = c;}stream.close();createNormals();createTexCoords();createTangents();createVBOs();
}void Model::createNormals()
{normals = std::make_unique<QVector3D[]>(numVertices);for (unsigned int i = 0; i < numFaces; ++i){QVector3D a = QVector3D(vertices[indices[i * 3 + 0]]);QVector3D b = QVector3D(vertices[indices[i * 3 + 1]]);QVector3D c = QVector3D(vertices[indices[i * 3 + 2]]);QVector3D faceNormal = QVector3D::crossProduct((b - a), (c - b));// Accumulates face normals on the verticesnormals[indices[i * 3 + 0]] += faceNormal;normals[indices[i * 3 + 1]] += faceNormal;normals[indices[i * 3 + 2]] += faceNormal;}for (unsigned int i = 0; i < numVertices; ++i){normals[i].normalize();}
}void Model::createTexCoords()
{texCoords = std::make_unique<QVector2D[]>(numVertices);// Compute minimum and maximum valuesauto minz = std::numeric_limits<float>::max();auto maxz = std::numeric_limits<float>::lowest();for (unsigned int i = 0; i < numVertices; ++i){minz = std::min(vertices[i].z(), minz);maxz = std::max(vertices[i].z(), maxz);}for (unsigned int i = 0; i < numVertices; ++i){auto s = (std::atan2(vertices[i].y(), vertices[i].x()) + M_PI) / (2 * M_PI);auto t = 1.0f - (vertices[i].z() - minz) / (maxz - minz);texCoords[i] = QVector2D(s, t);}
}void Model::loadTexture(const QImage &image)
{if (textureID){glDeleteTextures(1, &textureID);}glGenTextures(1, &textureID);glBindTexture(GL_TEXTURE_2D, textureID);glTexImage2D(GL_TEXTURE_2D, 0, GL_RGBA, image.width(), image.height(), 0, GL_RGBA, GL_UNSIGNED_BYTE, image.bits());glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_REPEAT);glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_REPEAT);glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_LINEAR);glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_LINEAR_MIPMAP_LINEAR);glGenerateMipmap(GL_TEXTURE_2D);
}void Model::createTangents()
{tangents = std::make_unique<QVector4D[]>(numVertices);std::unique_ptr<QVector3D[]> bitangents;bitangents = std::make_unique<QVector3D[]>(numVertices);for (unsigned int i = 0; i < numFaces ; ++i){unsigned int i1 = indices[i * 3 + 0];unsigned int i2 = indices[i * 3 + 1];unsigned int i3 = indices[i * 3 + 2];QVector3D E = vertices[i1].toVector3D();QVector3D F = vertices[i2].toVector3D();QVector3D G = vertices[i3].toVector3D();QVector2D stE = texCoords[i1];QVector2D stF = texCoords[i2];QVector2D stG = texCoords[i3];QVector3D P = F - E;QVector3D Q = G - E;QVector2D st1 = stF - stE;QVector2D st2 = stG - stE;QMatrix2x2 M;M(0, 0) = st2.y();M(0, 1) = -st1.y();M(1, 0) = -st2.x();M(1, 1) = st1.x();M *= (1.0 / (st1.x() * st2.y() - st2.x() * st1.y()));QVector4D T = QVector4D (M(0, 0) * P.x() + M(0, 1) * Q.x(),M(0, 0) * P.y() + M(0, 1) * Q.y(),M(0, 0) * P.z() + M(0, 1) * Q.z(), 0.0);QVector3D B = QVector3D (M(1, 0) * P.x() + M(1, 1) * Q.x(),M(1, 0) * P.y() + M(1, 1) * Q.y(),M(1, 0) * P.z() + M(1, 1) * Q.z());tangents[i1] += T;tangents[i2] += T;tangents[i3] += T;bitangents[i1] += B;bitangents[i2] += B;bitangents[i3] += B;}for (unsigned int i = 0; i < numVertices; ++i){const QVector3D &n = normals[i];const QVector4D &t = tangents[i];tangents[i] = (t - n * QVector3D::dotProduct(n, t.toVector3D())).normalized();QVector3D b = QVector3D::crossProduct(n, t.toVector3D());double hand = QVector3D::dotProduct(b, bitangents[i]);tangents[i].setW((hand < 0.0) ? -1.0 : 1.0);}
}三、下载链接
https://download.csdn.net/download/u013083044/88861312。
这篇关于qt-OPENGL-星系仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






