本文主要是介绍按键控制LED和光敏传感器控制蜂鸣器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
按键控制LED
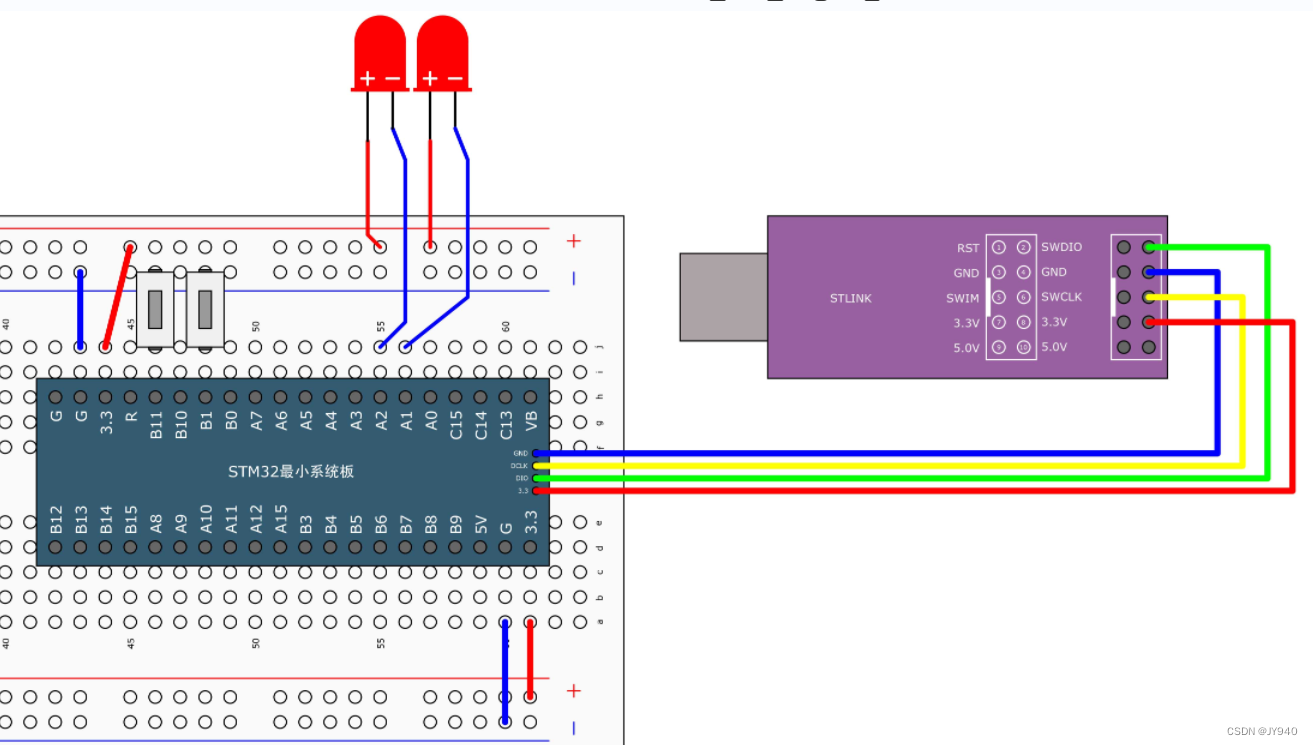
把两个按键分别接在PB11、PB1上面,两个LED接在PA1和PA2上面
main.c#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Key.h"uint8_t keynum;
//全局变量,用来存键码的返回值,与局部变量作用域不同
//局部变量只能在本函数使用,全局变量每个函数都可使用
//在函数里优先使用自己的局部变量,如果没有才会使用外部的全局变量int main(void)
{LED_Init(); //完成led的初始化,默认低电平Key_Init(); //初始化按键while(1){keynum = key_Getnum(); //不断读取键码值,放在keynum变量里if(keynum == 1) //按键1按下{LED1_Turn(); //电平翻转,led状态取反,需用到GPIO_readoutput函数}if(keynum == 2) //按键2按下{LED2_Turn();}}
}Led.c#include "stm32f10x.h" // Device headervoid LED_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //打开时钟GPIO_InitTypeDef GPIO_InitStructure; //结构体变量名GPIO_InitStructAGPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; //GPIO-MODE_OUT_OD 开漏输出 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2; //用按位或选择多个引脚GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure); //使用的是地址传递,将指定的GPIO外设初始化好GPIO_SetBits(GPIOA, GPIO_Pin_1 | GPIO_Pin_2); //初始化led是高电平,熄灭状态
}void LED1_ON(void) //点亮LED1
{GPIO_ResetBits(GPIOA, GPIO_Pin_1); //低电平点亮
}void LED1_OFF(void) //熄灭LED1
{GPIO_SetBits(GPIOA, GPIO_Pin_1); //高电平熄灭
}void LED1_Turn(void) //LED1状态取反,电平翻转
{if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_1) == 0) //GPIO_ReadOutputDataBit,来读取端口输出的是什么{GPIO_SetBits(GPIOA, GPIO_Pin_1); //状态取反,0变1}else{GPIO_ResetBits(GPIOA, GPIO_Pin_1); //状态取反,1变0}
}void LED2_ON(void)
{GPIO_ResetBits(GPIOA, GPIO_Pin_2);
}void LED2_OFF(void)
{GPIO_SetBits(GPIOA, GPIO_Pin_2);
}void LED2_Turn(void)
{if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_2) == 0){GPIO_SetBits(GPIOA, GPIO_Pin_2);}else{GPIO_ResetBits(GPIOA, GPIO_Pin_2);}
}Led.h
#ifndef __LED_H
#define __LED_Hvoid LED_Init(void);
void LED1_ON(void);
void LED1_OFF(void);
void LED2_ON(void);
void LED2_OFF(void);
void LED1_Turn(void);
void LED2_Turn(void);#endifKey.c#include "stm32f10x.h" // Device header
#include "Delay.h"
void Key_Init(void) //按键初始化函数
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //打开时钟GPIO_InitTypeDef GPIO_InitStructure; //结构体变量名GPIO_InitStructBGPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //GPIO_Mode_IPU上拉输入,按键未按时默认高电平GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);
}uint8_t key_Getnum(void) //读取按键值的函数
{uint8_t keynum = 0; //按键键码,没有按下,就返回0,局部变量if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1)==0) //读取GPIO端口,返回值就是输入数据寄存器的某一位值,等于0代表按键按下{Delay_ms(20); //按键按下消抖20mswhile(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1)==0); //松开按键Delay_ms(20); //消抖keynum = 1; //键码为1}if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11)==0) //按键按下{Delay_ms(20); //消抖while(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11)==0);Delay_ms(20);keynum = 2;}return keynum;
}Key.h#ifndef __KEY_H
#define __KEY_Hvoid Key_Init(void);
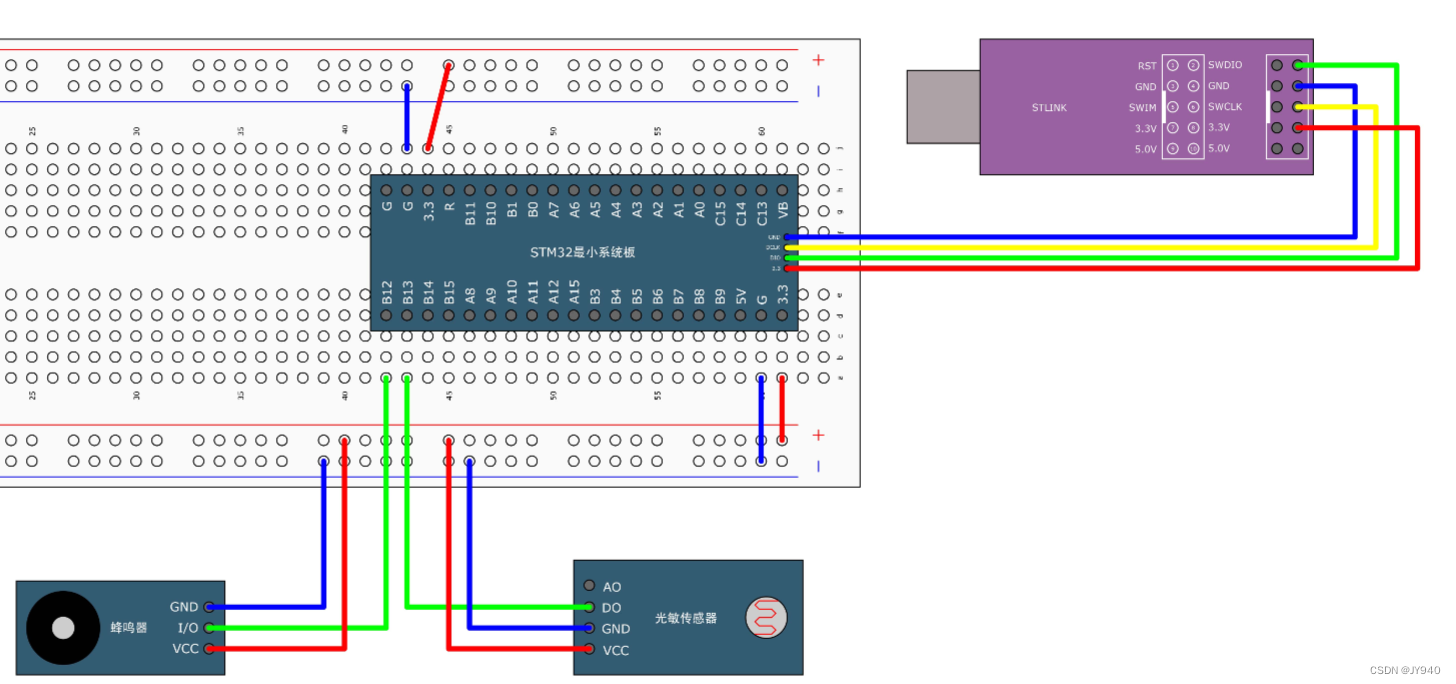
uint8_t key_Getnum(void);#endif光敏传感器控制蜂鸣器
Main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
#include "LightSensor.h"int main(void)
{Buzzer_Init(); //初始化蜂鸣器LightSensor_Init(); //初始化光敏传感器while(1){if(LightSensor_Get() == 1) //光线暗,指示灯不亮{Buzzer_ON(); //蜂鸣器响}else{Buzzer_OFF(); //蜂鸣器不响}}
}Buzzer.c
#include "stm32f10x.h" // Device headervoid Buzzer_Init(void) //初始化蜂鸣器函数
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //开启时钟GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; //开漏输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStructure);GPIO_SetBits(GPIOB, GPIO_Pin_12);
}void Buzzer_ON(void)
{GPIO_ResetBits(GPIOB, GPIO_Pin_12);
}void Buzzer_OFF(void)
{GPIO_SetBits(GPIOB, GPIO_Pin_12);
}void Buzzer_Turn(void)
{if (GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_12) == 0){GPIO_SetBits(GPIOB, GPIO_Pin_12);}else{GPIO_ResetBits(GPIOB, GPIO_Pin_12);}
}Buzzer.h
#ifndef __BUZZER_H
#define __BUZZER_Hvoid Buzzer_Init(void);
void Buzzer_ON(void);
void Buzzer_OFF(void);
void Buzzer_Turn(void);#endifLightSensor.c
#include "stm32f10x.h" // Device headervoid LightSensor_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);
}uint8_t LightSensor_Get(void)
{return GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13);
}LightSensor.h
#ifndef __LIGHTSENSOR_H
#define __LIGHTSENSOR_Hvoid LightSensor_Init(void);
uint8_t LightSensor_Get(void);#endif这篇关于按键控制LED和光敏传感器控制蜂鸣器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




