本文主要是介绍飞行波士顿的直升机路线六个月:考虑到城市空气流动性的观察,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
The Bottom Line: I’ve been flying Boston’s helicopter routes for the last six months, and am happy to share with you some observations that have important implications for future commercial eVTOL operations. If we can continue this practice of incorporating the pilot’s experience flying existing routes and procedures in other cities around the world, we can be in a better position to validate (or invalidate) the assumptions we are making about how to best launch commercial eVTOL operations. There is only so much we can learn from what is published as opposed to actually going through the motions of these procedures, and the potential for variability that may be otherwise unforeseen. The introduction of such variability has important implications for how we plan to build a reliable commercial service, and what we can do now to prepare for a more favorable operating environment that can scale as demand grows.
最重要的是:在过去的六个月中,我一直在乘坐波士顿的直升飞机路线,很高兴与您分享一些对未来的商业eVTOL运营有重要影响的观察结果。 如果我们能够继续采用飞行员在全球其他城市飞行现有路线和程序的经验的做法,那么我们可以更好地验证(或使之无效)关于如何最佳启动商业eVTOL运营的假设。 我们只能从已发表的内容中学到很多东西,而不是实际经历这些程序的动作,以及从其他方面无法预料的可变性。 这种可变性的引入对我们计划如何构建可靠的商业服务以及我们现在可以做些什么,以准备一个可以随需求增长而扩展的更有利的运营环境具有重要意义。
As discussed in earlier articles, I view Urban Air Mobility (UAM) as the next chapter of an air taxi industry that traces its roots as far back as the 1940’s with the launch of Los Angeles Airways and New York Airways. To support this industry, regulators and communities have cooperated to create many of the procedures, routes, and infrastructure that we still use today. Now that batteries have reached a certain degree of maturity that can safely replace conventional engines, a much quieter aircraft with different capabilities, the electric vertical take-off and landing aircraft (eVTOL), will enter service.
如前几篇文章所述,我将城市空中交通(UAM)视为空中出租车行业的下一章,其起源可以追溯到1940年代洛杉矶航空和纽约航空的推出。 为了支持该行业,监管机构和社区已经合作创建了许多程序,路线和基础设施,而我们今天仍在使用它们。 现在,电池已达到一定程度的成熟度,可以安全地取代传统发动机,一种功能更安静,更安静的飞机,电动垂直起降飞机(eVTOL)将投入使用。

With this in mind, industry has been hard at work planning the initial launch of this exciting service with a certain degree of comfort that many of the existing routes and procedures are applicable for eVTOL operations. Indeed, today’s current helicopter routes ought to support the initial volume of UAM flights with ease. However, as we look to the projected growth of UAM and the overall volume of eVTOL aircraft that are assumed to enter service, challenging operational questions for how these aircraft will fly, under what regulations, and with what, if any, support from air traffic control are being considered.
考虑到这一点,业界一直在努力计划这项令人兴奋的服务的首次发布,并且一定程度的舒适性使得许多现有路线和程序都适用于eVTOL操作。 确实,今天的当前直升机路线应该能够轻松支持UAM的初始飞行。 但是,当我们考虑预计将投入使用的UAM的预计增长和eVTOL飞机的总体数量时,对于这些飞机将如何飞行,在何种法规下以及在空中交通的支持下(如果有的话)的运营问题提出了挑战正在考虑控制。
This following summary offers insight into my experience flying some of these routes in a Robinson 44 helicopter through Boston’s class “B” airspace, and the variation in procedures that can exist from controller to controller. This is not intended to be an exhaustive list, but rather the start of what I hope will be a growing catalogue of observations we can start collecting from flying our local helicopter routes and sharing similar observations with our regulators, working groups, and important industry stakeholders.
以下摘要使我了解了我在乘坐Robinson 44型直升机穿越波士顿B级空域的某些航线时的经验,以及各个控制器之间可能存在的程序差异。 这并不是一个详尽的清单,而是我希望它将开始成为一个越来越多的观察目录,我们可以从飞行当地的直升机路线开始收集,并与监管机构,工作组以及重要的行业利益相关者分享类似的观察结果。
- Observation: Not all helicopter routes are eVTOL friendly. As you can see in the adjacent diagram, many of Boston’s helicopter routes are designed to fly over existing infrastructure like roads, railroad tracks, or bodies of water. They are designed with such visual aids to enable the pilot’s ability to maintain visual contact with the route which requires VFR conditions, and also so that the pilot will use these visual aids to maintain conformance to the published route. The design of these routes using roads or railroad tracks also has the additional benefit of minimizing impact to the underlying communities by asking pilots to fly where the ambient noise level is acceptable at higher levels. 观察:并非所有的直升机航线都支持eVTOL。 正如您在旁边的图中所看到的那样,波士顿的许多直升机航线都旨在飞越现有的基础设施,例如道路,铁轨或水域。 它们设计有这样的视觉辅助设备,使飞行员能够与需要VFR条件的航线保持视觉接触,并且飞行员也可以使用这些视觉辅助设备来保持与已发布航线的一致性。 通过使用道路或铁轨设计这些路线,还具有额外的好处,即通过要求飞行员在较高水平的环境噪声水平可以接受的地方飞行,从而将对底层社区的影响最小化。

Take-away: Because eVTOL aircraft will be electric, they will need to fly as direct as possible between their origin and destination so as to conserve energy. While some existing routes may allow for this, many others will not. It is also important to mention that flying on helicopter routes is not required. These routes exist to provide a structured way in, out, and around busy airspace for helicopters. However in many cases, there can be just as many “off-route” operations as “on-route”. If we wish to create procedures and routes for eVTOL aircraft that are community friendly, we will need to consider common eVTOL vehicle performance capabilities, the ability for eVTOL routes to absorb more volume as demand grows, and their impact on underlying communities.
要点:因为eVTOL飞机将是电动的,所以他们将需要在其始发地与目的地之间尽可能直飞,以节省能源。 尽管某些现有路线可能允许这样做,但其他许多路线则不允许这样做。 同样重要的是要提到不需要在直升机路线上飞行。 这些路线的存在是为了为直升机提供进出繁忙空间的结构化方法。 但是,在许多情况下,“离线”操作与“在线”操作一样多。 如果我们希望为社区友好的eVTOL飞机创建程序和航线,我们将需要考虑通用的eVTOL车辆性能,eVTOL航线随着需求的增长吸收更多客流量的能力,以及它们对基础社区的影响。
2) Observation: Helicopter pilots operating on helicopter routes need to talk to Boston’s Logan tower. There are multiple helicopter routes in Boston that provide access to the city from all directions. As you continue to fly on a route “inbound”, it will eventually take you closer to Boston’s class “B” airspace which requires a specific clearance from ATC to enter. When flying on these routes, the procedure requires pilots to communicate with “Boston Skyways”, a dedicated helicopter frequency that is supported by Boston’s Logan (BOS) tower. When I depart from my home airport (OWD) heading to Boston, I call Skyways and let them know what route I want to take inbound and outbound (in and out of the city). If they can accommodate me, they will give me a 4-digit transponder code, grant me clearance into class “B” airspace, and provide the local altimeter setting. I will then maintain communication with them until I leave Boston’s class “B” airspace at which point they will cancel my transponder code or give me a new frequency to speak with another controller.
2)观察:在直升飞机路线上操作的直升飞机飞行员需要与波士顿的洛根塔通话。 波士顿有多条直升飞机路线,可从各个方向前往市区。 当您继续沿“入站”航线飞行时,最终将使您更接近波士顿的B级空域,该空域需要获得ATC的许可才能进入。 在这些路线上飞行时,该程序要求飞行员与“波士顿天际线”(Boston Skyways)进行通信,这是由波士顿洛根(BOS)塔支撑的专用直升机频率。 当我从家乡机场(OWD)出发前往波士顿时,我给Skyways打电话,让他们知道我要乘坐进出机场(进出城市)的路线。 如果他们可以容纳我,他们会给我一个4位数字的应答器代码,允许我进入“ B”级空域,并提供当地的高度计设置。 然后,我将与他们保持联系,直到我离开波士顿的B级空域为止,此时他们将取消我的应答器代码或给我新的频率与其他管制员交谈。

Take-away: This is a great service Boston tower provides, and it will certainly suffice for the initial volume of eVTOL flights should eVTOL service ever come to Boston. However, as the industry continues to scale, this paradigm of helicopter voice-based traffic management will become so overwhelming that it will no longer be offered, and an alternative will be needed. Furthermore, given that VFR traffic are never guaranteed clearance into class “B” airspace (priority is always given to IFR traffic first), a new type of infrastructure to facilitate access in and out of urban airspace is needed. Whether that may take the form of “exclusion zones”, VFR corridors or VFR transition routes, it behooves us to examine what the current paradigm is in each city and evaluate how much scalability that model has for eVTOL/UAM performance capabilities and limitations.
要点:这是波士顿塔提供的一项很棒的服务,如果eVTOL服务曾经到过波士顿,那肯定足以满足eVTOL初始航班的需求。 但是,随着该行业的规模不断扩大,这种基于直升机语音的交通管理范例将变得势不可挡,以至于不再提供,需要替代方案。 此外,鉴于绝对不能保证VFR交通进入“ B”级空域(始终优先考虑IFR交通),因此需要一种新型的基础设施,以方便进出城市空域。 无论是采取“禁区”,VFR走廊还是VFR过渡路线的形式,我们都应该检查每个城市当前的范例,并评估该模型对eVTOL / UAM性能和局限性的可扩展性。
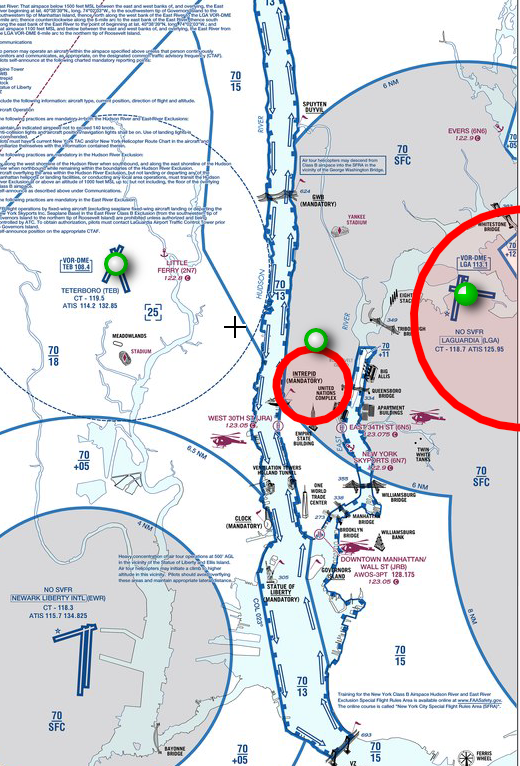
3) Observation: Helicopter pilots traditionally fly “on the right” in order to create some degree horizontal separation. In day operations, for example, this can be on a published route where pilots flying in opposite directions can fly on their own respective “right side”. For night operations, this can be done when using a highway to navigate. For emergency precautions, helicopter night operations suggest a route of flight close to well-lit areas, such as highways. In case the pilot needs to auto-rotate, it can be done in with a greater degree of visibility. With respect to observation #1, if a given city allows for UAM operations at night, this is another important aspect to consider for route design. To offer another example, flying on the right is also expected when navigating the VFR Hudson River corridor in New York City. As you can see in this image, southbound traffic fly on the west side of the river and northbound traffic fly on the east side.
3)观察:直升机飞行员通常会“向右”飞行,以形成一定程度的水平间隔。 例如,在日间操作中,这可以是在已发布的路线上,在该路线上,朝相反方向飞行的飞行员可以在自己的“右侧”飞行。 对于夜间操作,可以在使用高速公路导航时完成。 为了紧急预防措施,直升机夜间操作建议在接近光线充足的区域(例如高速公路)附近飞行。 万一飞行员需要自动旋转,可以以更高的可见度完成旋转。 关于观察#1,如果给定的城市允许夜间进行UAM操作,则这是路线设计要考虑的另一个重要方面。 再举一个例子,在纽约市的VFR哈德逊河走廊上航行时,也有望在右侧飞行。 如您在此图中看到的,南行交通在河的西侧,北行交通在东侧。
Take-away: When flying VFR, which is expected for most helicopter routes, visual separation is critical for maintaining a safe environment. Agreed upon methods for horizontal separation, like flying on the right, is important, but it may not be enough when operations begin to scale. Furthermore, while pilots flying in the same direction have horizontal separation from opposing traffic, there doesn’t seem to be any procedures in place today for aircraft flying in the same direction, on the same route. When I speak with Boston’s “Skyways” frequency, they do share with me where other aircraft operating in my vicinity are, and to “maintain visual separation”. However, these services will not be available in the future if it is expected for eVTOL flights to operate outside controlled airspace and therefore will not be talking to air traffic control.
要点:在飞行VFR时(大多数直升机航线都应如此),目视分离对于维持安全的环境至关重要。 商定用于水平分隔的方法(如在右侧飞行)很重要,但是当操作开始扩展时可能还不够。 此外,虽然向同一方向飞行的飞行员与相对的交通水平分开,但是今天似乎没有针对沿同一方向,同一路线飞行的飞机采取任何程序。 当我以波士顿的“ Skyways”频率讲话时,他们确实与我分享了附近其他飞机的运行位置,并“保持了视觉上的隔离”。 但是,如果预计eVTOL航班将在受控空域之外运行,那么将来将无法使用这些服务,因此不会与空中交通管制进行对话。
4) Observation: I am given low altitude restrictions when flying in Boston’s class “B” airspace. To remain clear of the arrivals and departures from Boston’s Logan airport, there are important altitude restrictions helicopter operations must obey. Sometimes I am told to stay below 1000 feet, but I am always expected to fly below 1500 ft MSL. Unless otherwise indicated, altitude assignments are given by the controller. As you can see in this picture, I flew the route between 800–900 ft MSL.
4)观察:在波士顿“ B”级领空飞行时,我的飞行高度受到限制。 为了避免从波士顿洛根机场进出飞机场,直升飞机操作必须遵守重要的高度限制。 有时,我被告知要保持在1000英尺以下,但是总是希望我在MSL 1500英尺以下飞行。 除非另有说明,否则高度分配由控制器给出。 正如您在这张图片中看到的,我飞过了800-900英尺MSL之间的航线。

Take-away: There are three important implications for eVTOL flights that may fly on existing helicopter routes into controlled airspace with altitude restrictions to stay below 1000 ft. 1) To reiterate a previous point, clearance into Bravo airspace is never guaranteed for VFR aircraft, and in my experience, it is usually predicated upon controller workload.
要点:eVTOL飞行可能会在现有的直升机路线上飞入受控空域,高度限制保持在1000英尺以下,这有三点重要意义。1)要重申上一点,对于VFR飞机,绝对不能保证进入Bravo空域,根据我的经验,它通常取决于控制器的工作量。

With this in mind, it would be difficult to build a reliable UAM service around such variability. UAM route and operations planning will need to consider alternatives to the current procedure in Boston by establishing either VFR transition routes like what exists in Los Angeles today, or VFR corridors like what we have in the Hudson River in New York City, for example.
考虑到这一点,围绕这种可变性构建可靠的UAM服务将很困难。 UAM路线和运营计划将需要通过建立VFR过渡路线(例如今天的洛杉矶现有路线)或VFR走廊(例如我们在纽约市哈德逊河中的路线)来考虑波士顿当前程序的替代方案。
2) Altitude restrictions akin to what I experience in Boston may appear alarming to the underlying community, especially when more aircraft enter service. 3) It will be difficult to have vertical separation with these types of altitude restrictions which will become increasingly necessary as more aircraft enter service. There is a method for VFR aircraft flying in opposing directions, but current procedures allow for those rules to begin at altitudes exceeding 3000 feet. Since eVTOL aircraft will likely fly below this altitude, we will need to consider vertical separation requirements for UAM vehicles at UAM altitudes. Having flown the VFR Hudson River Corridor many times, I can share that it feels like flying in a “Bee’s nest”. Laguardia tower (Southbound) and Newark Tower (Northbound) certainly do their best to help each aircraft, but it can feel overwhelming to the most experienced pilot.
2)类似于我在波士顿经历的海拔限制可能会令底层社区感到震惊,尤其是在有更多飞机投入使用时。 3)这些类型的高度限制很难实现垂直间隔,随着越来越多的飞机投入使用,这种高度限制变得越来越必要。 有一种VFR飞机向相反方向飞行的方法,但是当前的程序允许这些规则从超过3000英尺的高度开始。 由于eVTOL飞机可能会在此高度以下飞行,因此我们需要考虑UAM高度的UAM车辆的垂直间隔要求。 我已经多次乘坐VFR哈德逊河走廊飞行,我可以分享这种感觉,就像在“蜂巢”中飞翔。 拉瓜迪亚塔(南行)和纽瓦克塔(北行)当然会尽力为每架飞机提供帮助,但对于最有经验的飞行员来说,它可能会让他们感到不知所措。

Finally, VFR aircraft in class “B” airspace needs to be clear of clouds with at least 3 statue miles of visibility. The ability to maintain clear of clouds in controlled airspace will be a further limiting factor to operations.
最后,B级空域的VFR飞机需要清除可见角至少3英里的云层。 在受控空域保持云层清洁的能力将是进一步限制运行的因素。
5) Observation: When I am cleared to enter Boston’s controlled airspace, Logan tower provides me with advisories regarding opposing traffic or other helicopters operating in my vicinity. This is a luxury for VFR flights in controlled airspace, and ATC can cancel their advisory service for VFR aircraft any time they want.
5)观察:当我被批准进入波士顿的领空时,洛根塔楼为我提供了有关在我附近作战或其他直升飞机的建议。 对于受控空域中的VFR飞行而言,这是一种奢侈,ATC可以随时取消其VFR飞机的咨询服务。
Take-away: Without advisories or radar separation services, the average cockpit is ill-equipped to meet the future needs of cooperative surveillance and deconfliction responsibilities. The need to see & avoid other aircraft is a responsibility that falls on the pilot during VFR operations, however today that is mostly done by looking outside and doing one’s best to stay clear of other aircraft. To help increase my ability to sense & avoid, I chose to invest in an ADS-B receiver which, when coupled with the appropriate app on my Ipad, allows me to see and avoid aircraft operating in my area. This capability dramatically helps my ability to stay clear of other aircraft, but it is still an uncommon cockpit accessory and is certainly not required equipment. At scale, the UAM industry will require such technology in the cockpit which is a far cry from what is mandated today. We must equip UAM pilots with all the cooperative surveillance information they can get, including similar information about UAS (drone) operations.
要点:没有咨询或雷达分离服务,普通座舱的设备不足,无法满足未来合作监视和反冲突责任的需求。 在VFR作业中,飞行员必须承担看和避开其他飞机的责任,但是如今,这主要是通过向外看并尽最大努力使自己远离其他飞机来完成的。 为了帮助提高感知和躲避的能力,我选择投资购买ADS-B接收器,将其与Ipad上的相应应用程序配合使用,可以使我看到并避免飞机在我所在的地区运行。 此功能极大地帮助了我远离其他飞机的能力,但它仍然是一个不常见的驾驶舱配件,并且肯定不是必需的设备。 在规模上,UAM行业将在座舱中需要这种技术,这与当今的要求相去甚远。 我们必须为UAM飞行员提供他们可以获得的所有合作监视信息,包括有关UAS(无人机)运行的类似信息。
Conclusion
结论
By actually flying the routes and procedures with the needs of the UAM industry in mind, we can start to “see around corners”, and anticipate what types of procedural and/or technological impediments can be expected so as to start developing more informed conclusions about our collective next steps. The routes and procedures we have today are a great start, and we are lucky to have them. Although my experience flying Boston’s helicopter routes are the source for these initial take-aways, it can certainly be argued that each city’s existing helicopter procedures will need to be reviewed by actually flying them in order to understand what similar, or different findings, can inform the launch of UAM in these respective environments. While the low altitude restrictions may be alarming for some, what concerns me most is the need for increased cooperative surveillance. While ADS-B “out” is mandated today for all aircraft, there no no such mandate for ADS-B “in”,which provides the type of visibility and awareness of a pilot’s surroundings that allows for “see and avoid” when we will not have the benefit of ATC services in the future. It is well documented that adding so many more aircraft to the 1090 frequency (used for ADS-B) will create congestion issues, which makes the case for new investment in cooperative surveillance technology even more critical for the safety case of UAM.
通过实际考虑UAM行业需求的路线和程序,我们可以开始“转危为安”,并预计可以预期哪些类型的程序和/或技术障碍,从而开始就以下方面得出更明智的结论:我们集体的下一步。 我们今天拥有的路线和程序是一个很好的开始,我们很幸运能拥有它们。 尽管以我在波士顿直升飞机路线上的飞行经历为这些初步收获的来源,但可以肯定地说,每个城市现有的直升飞机程序都需要通过实际飞行来进行审查,以了解哪些相似或不同的发现可以告知哪些问题。在这些各自的环境中启动UAM。 虽然低空限制可能使某些人感到震惊,但我最担心的是需要加强合作监视。 虽然今天对所有飞机都规定了ADS-B“外出”的要求,但对于ADS-B“内向”则没有这样的授权,它提供了飞行员周围环境的可见性和意识性,允许我们“视而不见”。将来不会受益于ATC服务。 有据可查的是,将更多的飞机增加到1090频率(用于ADS-B)会造成拥塞问题,这使得在合作监视技术上进行新投资的情况对于UAM的安全情况更为关键。
Since my team published our white paper, FlightPlan2030, we have been busy collaborating with air navigation service providers, regulators, airport authorities, peer organizations and communities. We are doing this to create a more favorable operating environment for the Urban Air Mobility ecosystem to grow naturally, without the type of procedural limitations we have reviewed in this article. We recently released a video which you can access here that summarizes our approach, and what you can expect for our next steps. Finally, our eVTOL proof of concept team is making great progress with our simulator which just released a video of their own here.
自从我的团队发布了我们的白皮书FlightPlan2030以来 ,我们一直在与空中航行服务提供商,监管机构,机场当局,同行组织和社区进行合作。 我们这样做是为了为城市空气流动生态系统创造自然环境增长的更有利的运营环境,而没有我们在本文中介绍的程序限制类型。 我们最近发布了一个视频,您可以在此处访问该视频,以总结我们的方法以及对下一步的期望。 最后,我们的eVTOL概念验证团队在我们的模拟器上取得了长足的进步,该模拟器刚刚在此处发布了自己的视频。
As always, if you have any questions or want to collaborate, please get in touch!
与往常一样,如果您有任何疑问或想要合作,请保持联系!
翻译自: https://medium.com/@daverottblatt/flying-bostons-helicopter-routes-for-six-months-observations-to-consider-for-urban-air-mobility-609758791e68
相关文章:
这篇关于飞行波士顿的直升机路线六个月:考虑到城市空气流动性的观察的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!