本文主要是介绍相机图像质量研究(21)常见问题总结:CMOS期间对成像的影响--隔行扫描/逐行扫描,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成像的影响--景深
相机图像质量研究(6)常见问题总结:光学结构对成像的影响--对焦距离
相机图像质量研究(7)常见问题总结:光学结构对成像的影响--镜片固化
相机图像质量研究(8)常见问题总结:光学结构对成像的影响--工厂调焦
相机图像质量研究(9)常见问题总结:光学结构对成像的影响--工厂镜头组装
相机图像质量研究(10)常见问题总结:光学结构对成像的影响--光圈
相机图像质量研究(11)常见问题总结:光学结构对成像的影响--像差
相机图像质量研究(12)常见问题总结:光学结构对成像的影响--炫光
相机图像质量研究(13)常见问题总结:光学结构对成像的影响--鬼影
相机图像质量研究(14)常见问题总结:光学结构对成像的影响--伪像
相机图像质量研究(15)常见问题总结:光学结构对成像的影响--暗角
相机图像质量研究(16)常见问题总结:光学结构对成像的影响--IRCUT
相机图像质量研究(17)常见问题总结:CMOS期间对成像的影响--靶面尺寸
相机图像质量研究(18)常见问题总结:CMOS期间对成像的影响--CFA
相机图像质量研究(19)常见问题总结:CMOS期间对成像的影响--Sensor Noise
相机图像质量研究(20)常见问题总结:CMOS期间对成像的影响--全局快门/卷帘快门
相机图像质量研究(21)常见问题总结:CMOS期间对成像的影响--隔行扫描/逐行扫描
相机图像质量研究(22)常见问题总结:CMOS期间对成像的影响--光学串扰
相机图像质量研究(23)常见问题总结:CMOS期间对成像的影响--紫晕
相机图像质量研究(24)常见问题总结:CMOS期间对成像的影响--摩尔纹
相机图像质量研究(25)常见问题总结:CMOS期间对成像的影响--过曝、欠曝
相机图像质量研究(26)常见问题总结:CMOS期间对成像的影响--坏点
相机图像质量研究(27)常见问题总结:补光灯以及遮光罩对成像的影响--遮光罩
相机图像质量研究(28)常见问题总结:补光灯以及遮光罩对成像的影响--补光灯
相机图像质量研究(29)常见问题总结:图像处理对成像的影响--图像插值Demosaic
相机图像质量研究(30)常见问题总结:图像处理对成像的影响--重影
相机图像质量研究(31)常见问题总结:图像处理对成像的影响--图像差
相机图像质量研究(32)常见问题总结:图像处理对成像的影响--振铃效应
相机图像质量研究(33)常见问题总结:图像处理对成像的影响--锯齿
相机图像质量研究(34)常见问题总结:图像处理对成像的影响--拖影
相机图像质量研究(35)常见问题总结:图像处理对成像的影响--运动噪声
相机图像质量研究(36)常见问题总结:编解码对成像的影响--块效应
相机图像质量研究(37)常见问题总结:编解码对成像的影响--条带效应
相机图像质量研究(38)常见问题总结:编解码对成像的影响--呼吸效应
相机图像质量研究(39)常见问题总结:编解码对成像的影响--运动模糊
相机图像质量研究(40)常见问题总结:显示器对成像的影响--画面泛白
目录
系列文章目录
前言
一、隔行扫描/逐行扫描
二、隔行扫描/逐行扫描的优缺点
前言
隔行扫描和逐行扫描原本适用于传统电视领域,这个叫法在现代电视的演进当中虽然丢失了原来的的作用但是仍保留其概念。
一、隔行扫描/逐行扫描
扫描方式最开始是在显示技术中使用的,后面传感器为了跟进技术才使用隔行扫描和逐行扫描,现在的CMOS传感器不区分扫描方式了,如果需要,可以直接变换图像格式。
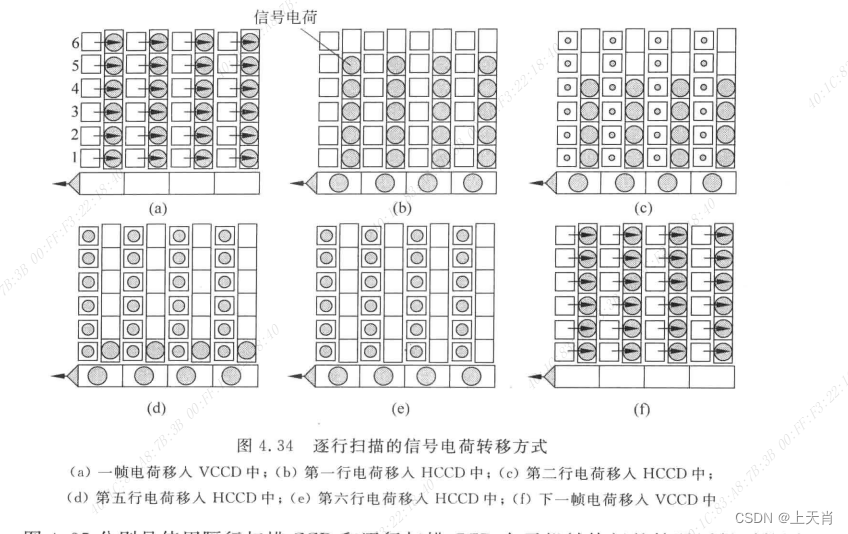
在传统阴极射向管电视机中,屏幕的显示靠电子枪一行一行的将电子射向荧光粉发光。逐行扫描就是一行接着一行的显示像素,隔行扫描是先扫描基数行,技术行扫描完再扫描偶数行。传统电视机视频制式NTSC和PAL都是隔行扫描,区别是一个是30帧一个是25帧。

从传统电视领域过渡到相机领域,为了适应阴极射线管电视,CCD相机也响应的设计了图像传感器像素的读出方式,也包含隔行扫描和逐行扫描。
下面是隔行扫描的电荷转移方式。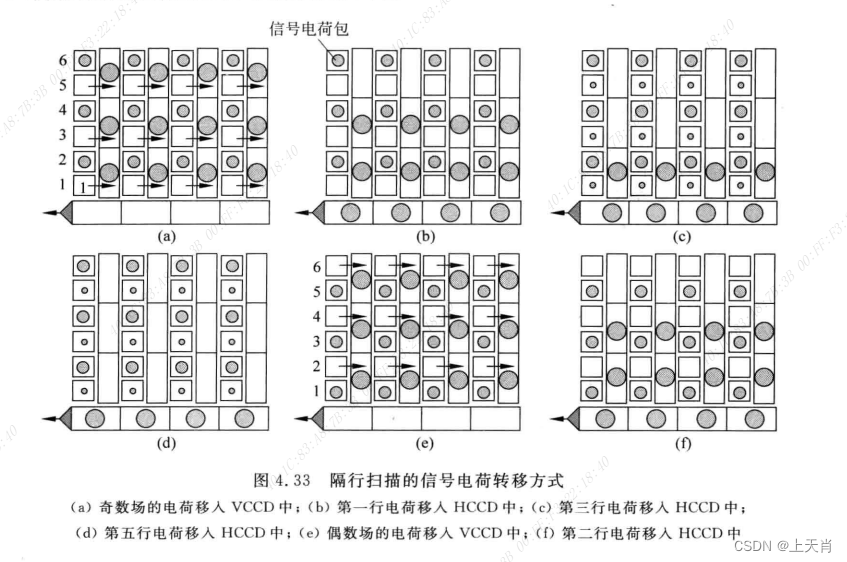
下面是逐行扫描的电荷转移方式
二、隔行扫描/逐行扫描的优缺点
在电视领域,隔行扫描最大的优缺点是可以利用视觉暂留原理,将两个不同时间拍摄的图像分别组成一幅图像的偶数行和奇数行。这样可以减小一半的带宽实现同样帧率的效果。但是缺点是如奇数行和偶数行由明显的对比差异,那么会发生闪烁现象。

总结
本节讲了隔行扫描/逐行扫描的原理和优缺点。
这篇关于相机图像质量研究(21)常见问题总结:CMOS期间对成像的影响--隔行扫描/逐行扫描的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




