本文主要是介绍相机图像质量研究(20)常见问题总结:CMOS期间对成像的影响--全局快门/卷帘快门,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成像的影响--景深
相机图像质量研究(6)常见问题总结:光学结构对成像的影响--对焦距离
相机图像质量研究(7)常见问题总结:光学结构对成像的影响--镜片固化
相机图像质量研究(8)常见问题总结:光学结构对成像的影响--工厂调焦
相机图像质量研究(9)常见问题总结:光学结构对成像的影响--工厂镜头组装
相机图像质量研究(10)常见问题总结:光学结构对成像的影响--光圈
相机图像质量研究(11)常见问题总结:光学结构对成像的影响--像差
相机图像质量研究(12)常见问题总结:光学结构对成像的影响--炫光
相机图像质量研究(13)常见问题总结:光学结构对成像的影响--鬼影
相机图像质量研究(14)常见问题总结:光学结构对成像的影响--伪像
相机图像质量研究(15)常见问题总结:光学结构对成像的影响--暗角
相机图像质量研究(16)常见问题总结:光学结构对成像的影响--IRCUT
相机图像质量研究(17)常见问题总结:CMOS期间对成像的影响--靶面尺寸
相机图像质量研究(18)常见问题总结:CMOS期间对成像的影响--CFA
相机图像质量研究(19)常见问题总结:CMOS期间对成像的影响--Sensor Noise
相机图像质量研究(20)常见问题总结:CMOS期间对成像的影响--全局快门/卷帘快门
相机图像质量研究(21)常见问题总结:CMOS期间对成像的影响--隔行扫描/逐行扫描
相机图像质量研究(22)常见问题总结:CMOS期间对成像的影响--光学串扰
相机图像质量研究(23)常见问题总结:CMOS期间对成像的影响--紫晕
相机图像质量研究(24)常见问题总结:CMOS期间对成像的影响--摩尔纹
相机图像质量研究(25)常见问题总结:CMOS期间对成像的影响--过曝、欠曝
相机图像质量研究(26)常见问题总结:CMOS期间对成像的影响--坏点
相机图像质量研究(27)常见问题总结:补光灯以及遮光罩对成像的影响--遮光罩
相机图像质量研究(28)常见问题总结:补光灯以及遮光罩对成像的影响--补光灯
相机图像质量研究(29)常见问题总结:图像处理对成像的影响--图像插值Demosaic
相机图像质量研究(30)常见问题总结:图像处理对成像的影响--重影
相机图像质量研究(31)常见问题总结:图像处理对成像的影响--图像差
相机图像质量研究(32)常见问题总结:图像处理对成像的影响--振铃效应
相机图像质量研究(33)常见问题总结:图像处理对成像的影响--锯齿
相机图像质量研究(34)常见问题总结:图像处理对成像的影响--拖影
相机图像质量研究(35)常见问题总结:图像处理对成像的影响--运动噪声
相机图像质量研究(36)常见问题总结:编解码对成像的影响--块效应
相机图像质量研究(37)常见问题总结:编解码对成像的影响--条带效应
相机图像质量研究(38)常见问题总结:编解码对成像的影响--呼吸效应
相机图像质量研究(39)常见问题总结:编解码对成像的影响--运动模糊
相机图像质量研究(40)常见问题总结:显示器对成像的影响--画面泛白
目录
系列文章目录
前言
一、全局快门和卷帘快门
二、两种快门的优劣
前言
全局快门和卷帘快门,是快门的两种方式。快门原意是胶片相机中拍摄时的机械动作,按下快门时胶片曝光并且卷动。在现在的电子传感器相机中,快门是感光器感光并进行模数转换的动作。
一、全局快门和卷帘快门
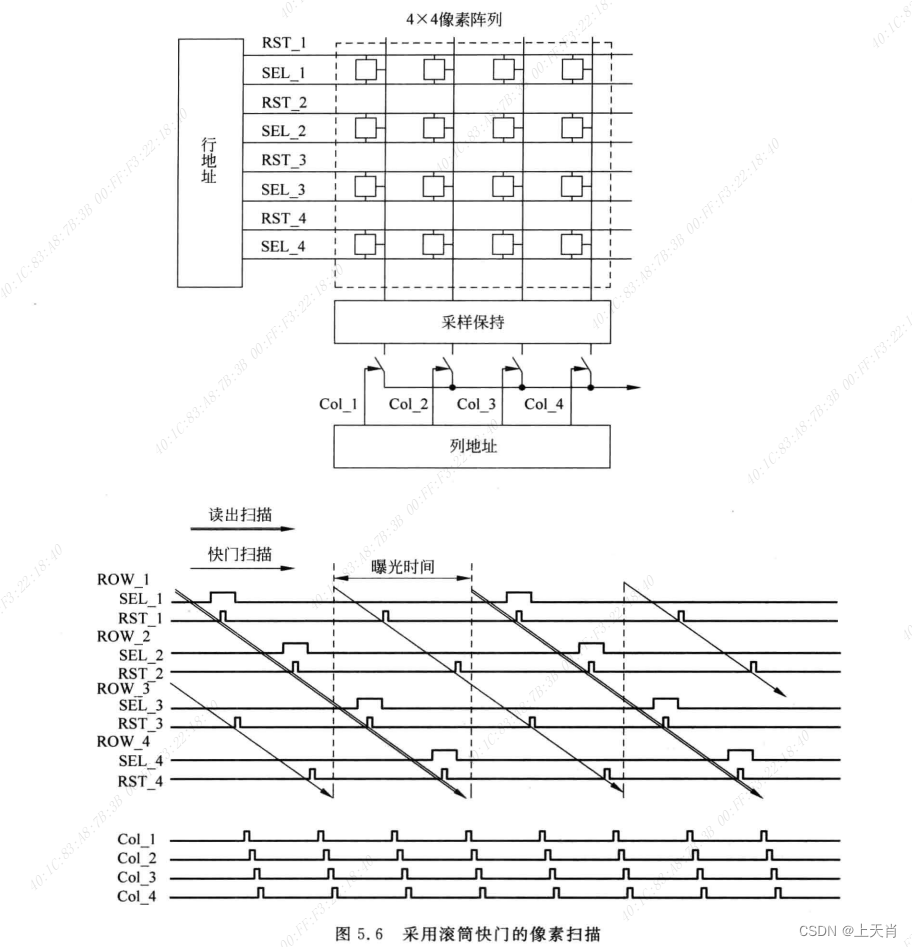
图像传感器的每个像素在曝光后,如何讲积累的电荷传递出去,是区分全局快门和卷帘快门的核心方式。卷帘快门的图像传感器,无法一次扫描每个像素的地址并读出数据,只能一次读出一行。卷帘快门则能够一次扫描所有像素的地址并读出数据。
下面是常见卷帘快门的读出形式。
二、两种快门的优劣
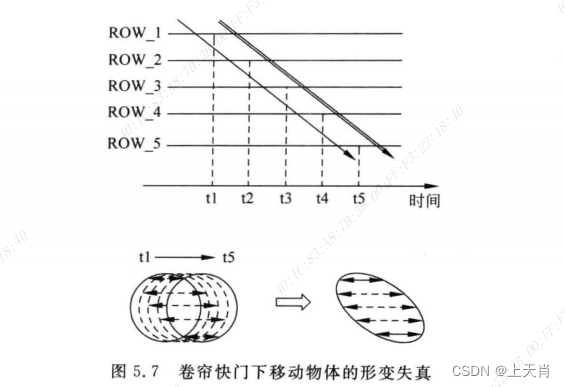
全局快门需要同时输出所有像素积累的电荷并保存,需要的工艺更加精细,通常会比较昂贵。 卷帘快门只需要每次输出一行像素的电荷保存下来,相对来说要求较低,但是相对应的是会造成果冻效应。
总结
本节讲了全局快门和卷帘快门的区分方式和优劣。
这篇关于相机图像质量研究(20)常见问题总结:CMOS期间对成像的影响--全局快门/卷帘快门的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




