本文主要是介绍FB轴CanByPosVel,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
io:
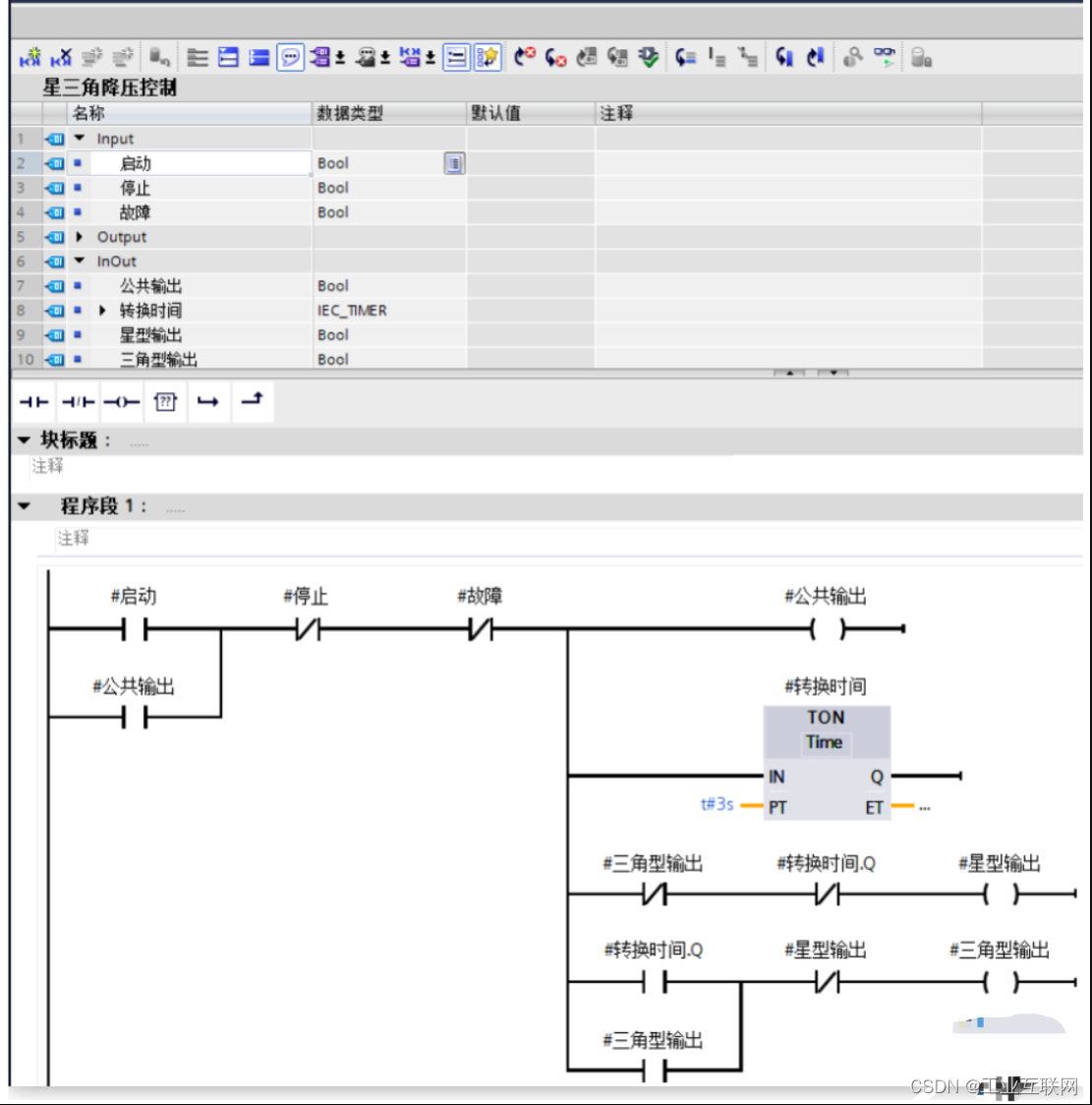
FUNCTION_BLOCK FB轴CanByPosVel
VAR_INPUTf齿轮比:REAL:=10000;// 齿轮比【圈脉冲】u1电源:BOOL:=FALSE;// h6040u1复位:BOOL:=FALSE;u1绝对模式:BOOL:=FALSE;f绝对坐标:REAL:=5;// h607Af速度:REAL:=10;// h6081f加速度:REAL:=10;// h6083f减速度:REAL:=10;// h6084
END_VAR
VAR_OUTPUTyb准备启动:BOOL;yb启动:BOOL;yb命令允许:BOOL;yb故障:BOOL;yb电压输出:BOOL;yb急停:BOOL;yb未启动:BOOL;yb非正常停止:BOOL;yb通讯:BOOL;yb位置到达:BOOL;yb限位开关:BOOL;b电压输出:BOOL;b轴使能状态 :BOOL;b伺服通信状态 :BOOL;b忙碌 :BOOL;b故障 :BOOL;f轴当前位置 :LREAL;f轴当前速度 :lREAL;f轴当前力矩 :REAL;h6041 :DINT;h6040 :DINT;e轴运行状态 :SMC_AXIS_STATE;//e轴故障代码 :MC_ERROR_CO;END_VAR
VAR//【输入5x】x6041:UINT;// 状态字x6061:SINT;// 模式x6064:DINT;// 电机位置x606C:DINT;// 电机速度x6077:INT;// 电机力矩//【输出9y】y6040:UINT;//控制字y6060:SINT;//模式y6081:UDINT;//【u32file】速度y6083:UDINT;//【u32file】加速y6084:UDINT;//【u32file】减速y607A:DINT;//【i32Targe】定位坐标y这篇关于FB轴CanByPosVel的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!