本文主要是介绍fb设备驱动框架分析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、字符设备注册过程:
归根到底,fb设备也是一个字符设备,所以逃不开常规的字符设备驱动框架:
Linux内核中编写字符设备驱动通常遵循以下步骤:
①、定义主设备号:
在Linux中,每个字符设备都有一个唯一的主设备号。你可以静态地分配一个主设备号,或者动态地从内核获取一个未使用的主设备号(一般使用动态获取即可)。
#define MY_DEVICE_MAJOR 240 // 示例:静态分配的主设备号
// 或者使用动态分配,通过alloc_chrdev_region在运行时获取主设备号
②、构造file_operations结构体:
file_operations结构体定义了设备驱动程序提供的操作接口。需要根据不同设备需求实现相应的函数,如open, read, write, release等。
static const struct file_operations fops = { .owner = THIS_MODULE, .open = my_device_open, .read = my_device_read, .write = my_device_write, .release = my_device_release, // 还可以实现其他的函数接口,如ioctl, mmap等 具体查看file_operation结构体定义
};
③、注册驱动:
使用register_chrdev函数来注册你的字符设备驱动。注册驱动的时候需要主设备号、设备名称和file_operations结构体作为参数。
static int __init my_device_init(void) { int result; // 如果是动态分配主设备号,使用alloc_chrdev_region() // alloc_chrdev_region(&dev, 0, 1, "my_device"); // major = MAJOR(dev); result = register_chrdev(MY_DEVICE_MAJOR, "my_device", &fops); if (result < 0) { printk(KERN_ALERT "Registering char device failed with %d\n", result); return result; } // 其他初始化代码,如创建设备节点等 return 0;
}
④、注册入口函数:
入口函数是模块的初始化函数,在模块加载时被调用(比如insmod(加载驱动)的时候就会调用了)。
module_init(my_device_init);
⑤、注册出口函数:
出口函数是模块的清理函数,在模块卸载时被调用。一般用来注销设备驱动并释放所有相关资源。
static void __exit my_device_exit(void) { unregister_chrdev(MY_DEVICE_MAJOR, "my_device"); // 如果是动态分配的主设备号,还需要释放它 // unregister_chrdev_region(dev, 1); // 其他清理代码
}
module_exit(my_device_exit);
最后添加模块描述、版本和许可证信息。
MODULE_LICENSE("GPL"); // 或你选择的许可证类型
MODULE_AUTHOR("Your Name"); // 作者名
MODULE_DESCRIPTION("A simple character device driver"); // 模块描述
MODULE_VERSION("1.0"); // 模块版本
上述过程就是编写一个字符设备驱动的整体过程,现在对应到LCD设备是怎么处理的呢?
二、 Framebuffer驱动程序框架
分析fb_mem.c文件(路径drivers\video\fbdev\core\fbmem.c):

可以看到在fbmem.c文件中使用了上文所讲述的字符设备注册过程。首先通过register_chrdev函数注册主设备号为29的字符设备,注册的字符设备中的ops变量实现了很多fb操作函数。
其中fb_read函数做了大概得调用关系总结,fb_read函数首先会获取fb_info结构体,fb_info结构体里面实现了硬件的参数设置和具体的硬件操作。所以fb_read函数的核心就是调用fb_info结构体里面注册的read函数。
注:其他fb操作函数都类似,都是先获取info结构体,进而调用里面注册的底层硬件操作函数。
调用关系:
例子1:
app: open("/dev/fb0", ...) 主设备号: 29, 次设备号: 0
--------------------------------------------------------------
kernel:fb_openint fbidx = iminor(inode);struct fb_info *info = = registered_fb[0];例子2:
app: read()
---------------------------------------------------------------
kernel:fb_readint fbidx = iminor(inode);struct fb_info *info = registered_fb[fbidx];if (info->fbops->fb_read)return info->fbops->fb_read(info, buf, count, ppos);src = (u32 __iomem *) (info->screen_base + p);dst = buffer;*dst++ = fb_readl(src++);copy_to_user(buf, buffer, c)
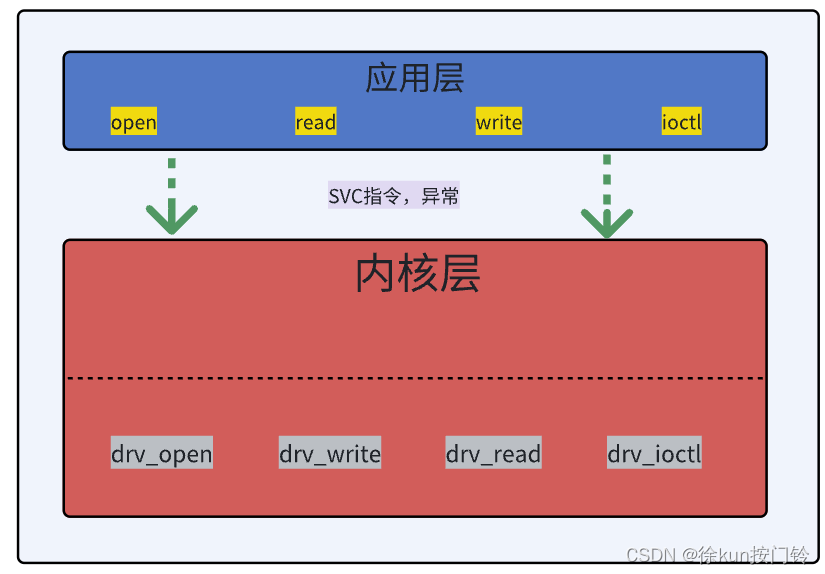
2.3、fb设备驱动框架总结:
分为上下两层:
- fbmem.c:承上启下
- 实现、注册file_operations结构体
- 把APP的调用向下转发到具体的硬件驱动程序
- xxx_fb.c:硬件相关的驱动程序
- 实现、注册fb_info结构体
- 实现硬件操作
三、Framebuffer驱动程序实现过程
3.1、明确主线任务
通过分析上述fbmem.c文件我们可以看到,我们要是想要编写一个fb设备的驱动的话,最终要就是要是先fb_info结构体。有几个重要的成员变量如下:
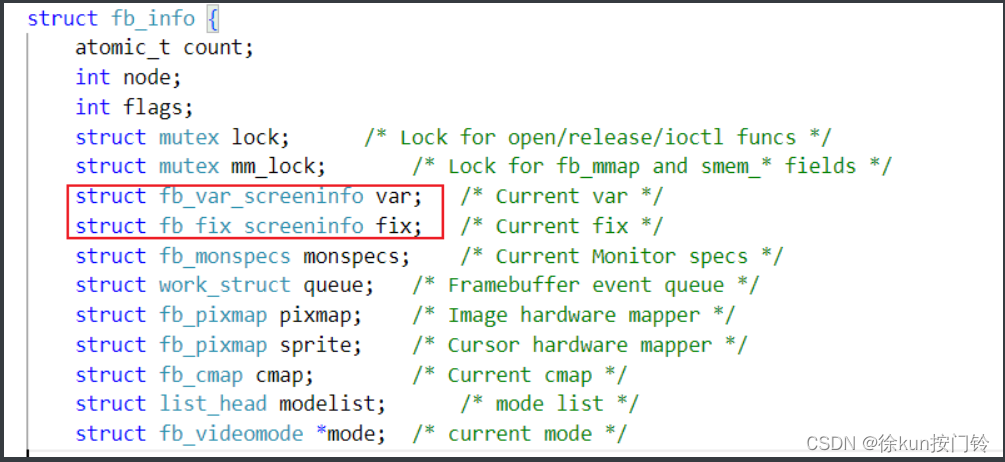
-
var这个成员包含了屏幕的可变参数,如分辨率、色深等。在驱动初始化时,应该根据硬件的能力来填充这些参数。 -
fix这个成员包含了屏幕的固定参数,如屏幕的物理尺寸、内存类型等。这些参数也应该在驱动初始化时根据硬件设置。
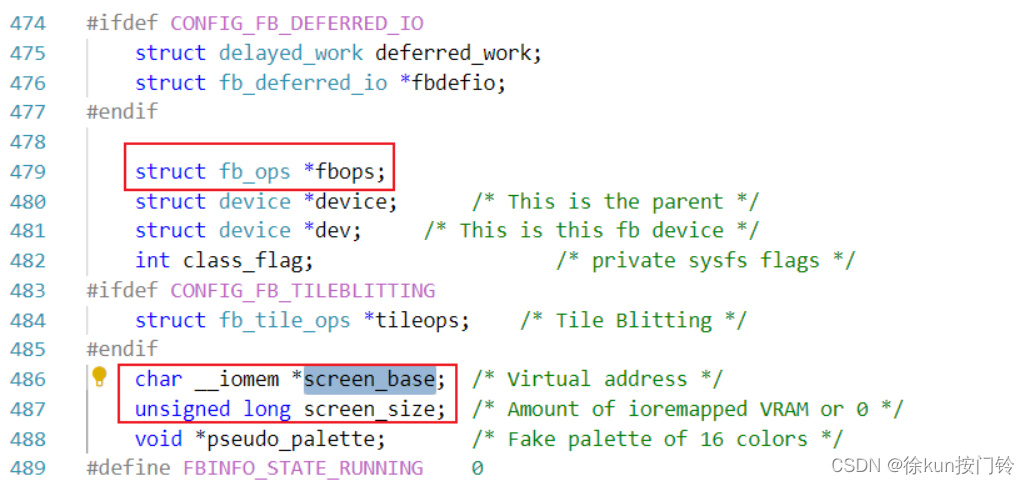
-
fbops这是一个指向fb_ops结构体的指针,它包含了帧缓冲设备所需的操作函数,如fb_fillrect、fb_copyarea、fb_imageblit等。这些函数是硬件相关的,必须根据具体的硬件设备来实现。 -
screen_base这是帧缓冲区的虚拟地址,它指向映射的显存区域。驱动需要设置这个指针以便用户空间可以访问显存。 -
screen_size表示映射的显存大小。这个值应该根据实际的显存大小来设置。
3.2、fb应用程序和驱动交互过程
1. open
app: open("/dev/fb0", ...) 主设备号: 29, 次设备号: 0
--------------------------------------------------------------
kernel:fb_open // fbmem.cstruct fb_info *info;info = get_fb_info(fbidx);if (info->fbops->fb_open) {res = info->fbops->fb_open(info,1); // 硬件相关的驱动if (res)module_put(info->fbops->owner);}
2. 获得可变信息(含有分辨率等)
app: ioctl(fd, FBIOGET_VSCREENINFO, &fb_info->var);
-------------------------------------------------------------------------
kernel:fb_ioctl // fbmem.cstruct fb_info *info = file_fb_info(file);do_fb_ioctl(info, cmd, arg);var = info->var; // 硬件相关的驱动设置的ret = copy_to_user(argp, &var, sizeof(var)) ? -EFAULT : 0;
3. 获得固定信息(含有显存信息)
app: ioctl(fd, FBIOGET_FSCREENINFO, &fb_info->fix);
-------------------------------------------------------------------------
kernel:fb_ioctl // fbmem.cstruct fb_info *info = file_fb_info(file);do_fb_ioctl(info, cmd, arg);fix = info->fix; // 硬件相关的驱动设置的ret = copy_to_user(argp, &fix, sizeof(fix)) ? -EFAULT : 0;
4. mmap
app:void *ptr = mmap(0,fb_info->var.yres_virtual * fb_info->fix.line_length,PROT_WRITE | PROT_READ,MAP_SHARED, fd, 0);
-------------------------------------------------------------------------
kernel:fb_mmap // fbmem.cstruct fb_info *info = file_fb_info(file);start = info->fix.smem_start;len = info->fix.smem_len;return vm_iomap_memory(vma, start, len);
3.2、实现"主线任务"
编写一个简单的FB设备驱动框架:
注:此处编写fb驱动只是为了更好的理解nxp官方的fb设备驱动代码。
代码如下:
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/platform_device.h>
#include <linux/fb.h> static struct fb_info *my_fb_info; static struct fb_ops my_fb_ops = { // .owner 应该在fb_info分配之后设置 // 其他操作函数根据需要进行实现
}; static int my_simple_fb_probe(struct platform_device *pdev)
{ int ret; my_fb_info = framebuffer_alloc(0, &pdev->dev); if (!my_fb_info) { ret = -ENOMEM; dev_err(&pdev->dev, "Cannot allocate framebuffer\n"); return ret; } my_fb_info->fbops = &my_fb_ops; my_fb_info->var.xres = 800; my_fb_info->var.yres = 600; // 设置其他framebuffer参数... my_fb_ops.owner = THIS_MODULE; // 设置其他fb_ops函数指针... ret = register_framebuffer(my_fb_info); if (ret < 0) { dev_err(&pdev->dev, "Cannot register framebuffer\n"); goto err_register_fb; } platform_set_drvdata(pdev, my_fb_info); dev_info(&pdev->dev, "Simple framebuffer driver loaded\n"); return 0; err_register_fb: framebuffer_release(my_fb_info); return ret;
} static int my_simple_fb_remove(struct platform_device *pdev)
{ struct fb_info *info = platform_get_drvdata(pdev); if (info) { unregister_framebuffer(info); framebuffer_release(info); } return 0;
} #ifdef CONFIG_OF
static const struct of_device_id my_simple_fb_of_match[] = { { .compatible = "vendor,my_simple_fb", }, {},
};
MODULE_DEVICE_TABLE(of, my_simple_fb_of_match);
#endif static struct platform_driver my_simple_fb_driver = { .probe = my_simple_fb_probe, .remove = my_simple_fb_remove, .driver = { .name = "my_simple_fb", .of_match_table = of_match_ptr(my_simple_fb_of_match), },
}; module_platform_driver(my_simple_fb_driver); MODULE_DESCRIPTION("Simple Framebuffer Platform Driver");
MODULE_LICENSE("GPL");
三、浅析NXP自己的LCD控制器的驱动程序
①、nxp自己的驱动程序分析
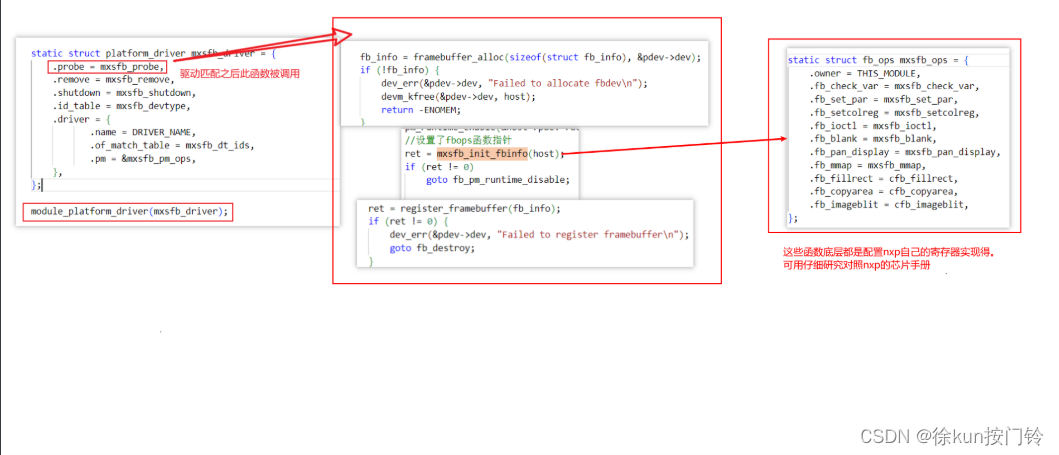
注:相关的fbops结构体中函数指针所指向的函数都是通过配置寄存器实现的,需要对照寄存器手册。其实就是配置寄存器进而设置lcdif(imx6ull)工作需要的一些配置。
②、imx6ull的lcd控制器dts分析
上面只是浅析了.c文件的大概实现,下面查看一下设备树的实现,直接查看他们自己的evk板子的设备树。
&lcdif {pinctrl-names = "default";pinctrl-0 = <&pinctrl_lcdif_dat&pinctrl_lcdif_ctrl&pinctrl_lcdif_reset>;display = <&display0>;status = "okay";display0: display {bits-per-pixel = <16>;bus-width = <24>;display-timings {native-mode = <&timing0>;timing0: timing0 {clock-frequency = <9200000>;hactive = <480>;vactive = <272>;hfront-porch = <8>;hback-porch = <4>;hsync-len = <41>;vback-porch = <2>;vfront-porch = <4>;vsync-len = <10>;hsync-active = <0>;vsync-active = <0>;de-active = <1>;pixelclk-active = <0>;};};};
};pinctrl_lcdif_dat: lcdifdatgrp {fsl,pins = <MX6UL_PAD_LCD_DATA00__LCDIF_DATA00 0x79......MX6UL_PAD_LCD_DATA23__LCDIF_DATA23 0x79>;};pinctrl_lcdif_ctrl: lcdifctrlgrp {fsl,pins = <MX6UL_PAD_LCD_CLK__LCDIF_CLK 0x79MX6UL_PAD_LCD_ENABLE__LCDIF_ENABLE 0x79MX6UL_PAD_LCD_HSYNC__LCDIF_HSYNC 0x79MX6UL_PAD_LCD_VSYNC__LCDIF_VSYNC 0x79>;};pinctrl_lcdif_reset: lcdifresetgrp {fsl,pins = </* used for lcd reset */MX6ULL_PAD_SNVS_TAMPER9__GPIO5_IO09 0x79>;};};
①、 &lcdif 节点:
pinctrl-names和pinctrl-0:这两个属性用于配置LCD接口的引脚控制(pinctrl)。pinctrl-names指定了控制组的名称(“default”),而pinctrl-0则引用了三个pinctrl组,分别用于数据(pinctrl_lcdif_dat)、控制信号(pinctrl_lcdif_ctrl)和复位信号(pinctrl_lcdif_reset)。display:此属性引用了一个名为display0的子节点,该子节点包含了显示器的具体配置。status:表示此设备的状态为 “okay”,意味着这个设备是激活和可用的。
②、 display0 节点:
bits-per-pixel和bus-width:分别指定了每个像素使用的位数(16位)和总线宽度(24位)。display-timings:这个节点包含了显示器的时序配置。- 在
timing0中,详细定义了显示器的各种时序参数,如clock-frequency(时钟频率)、hactive和vactive(水平和垂直有效像素数)、hfront-porch、hback-porch、hsync-len等(水平时序参数),以及vback-porch、vfront-porch、vsync-len等(垂直时序参数)。此外,还定义了同步信号(hsync, vsync)和像素时钟的极性。
③、pinctrl组节点: pinctrl_lcdif_dat、pinctrl_lcdif_ctrl和pinctrl_lcdif_reset分别定义了LCD数据线、控制线和复位线的引脚配置。在这些节点中,fsl,pins属性指定了具体的引脚分配和配置。例如,MX6UL_PAD_LCD_DATA00__LCDIF_DATA00 0x79表示将LCD_DATA00引脚分配给LCDIF_DATA00功能,并设置其配置为0x79。
这篇关于fb设备驱动框架分析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





