本文主要是介绍cesium mapboxgl+threebox glb 朝向问题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、3Dbuilder打开glb

二、cesium在pitch和heading都为0的情况下,不设置模型的朝向

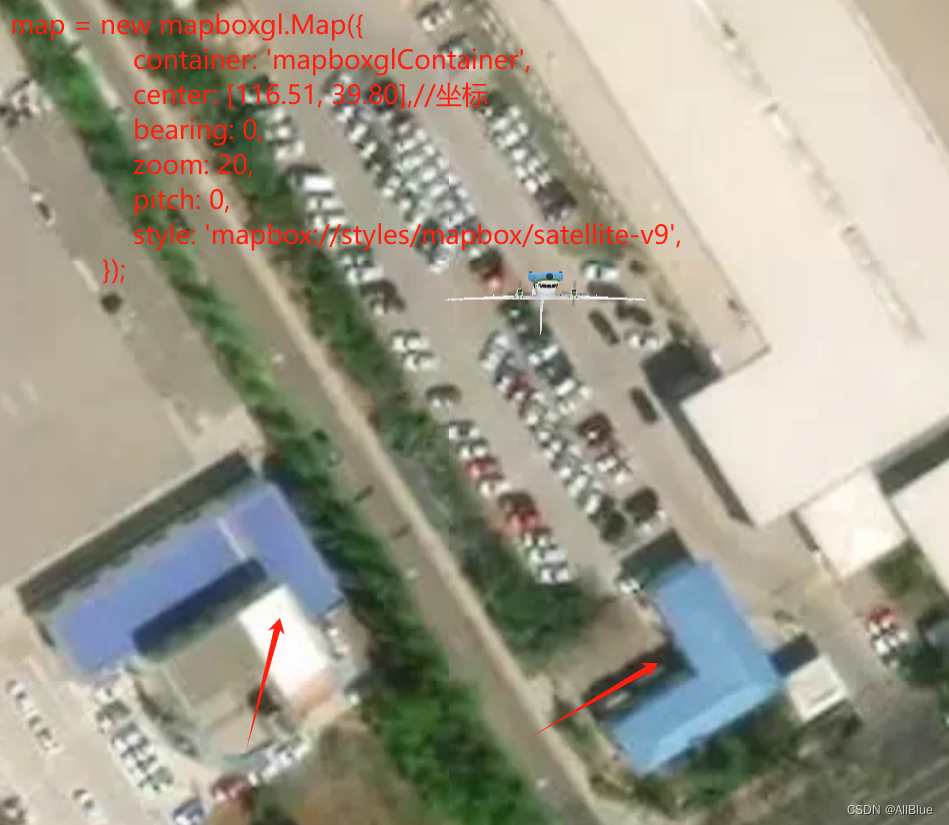
三、mapboxgl+threebox在pitch和bearing都为0的情况下,不设置模型的朝向

四、对于地图默认视角,cesium设置pitch=-90、heading=0的时候和mapboxgl+threebox设置pitch=0、bearing=0的时候地图视角相同

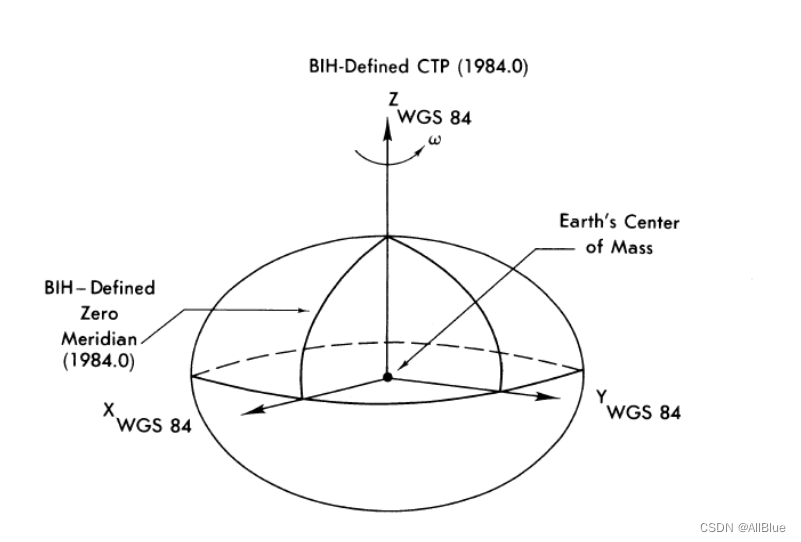
五:cesium坐标轴:z轴向上
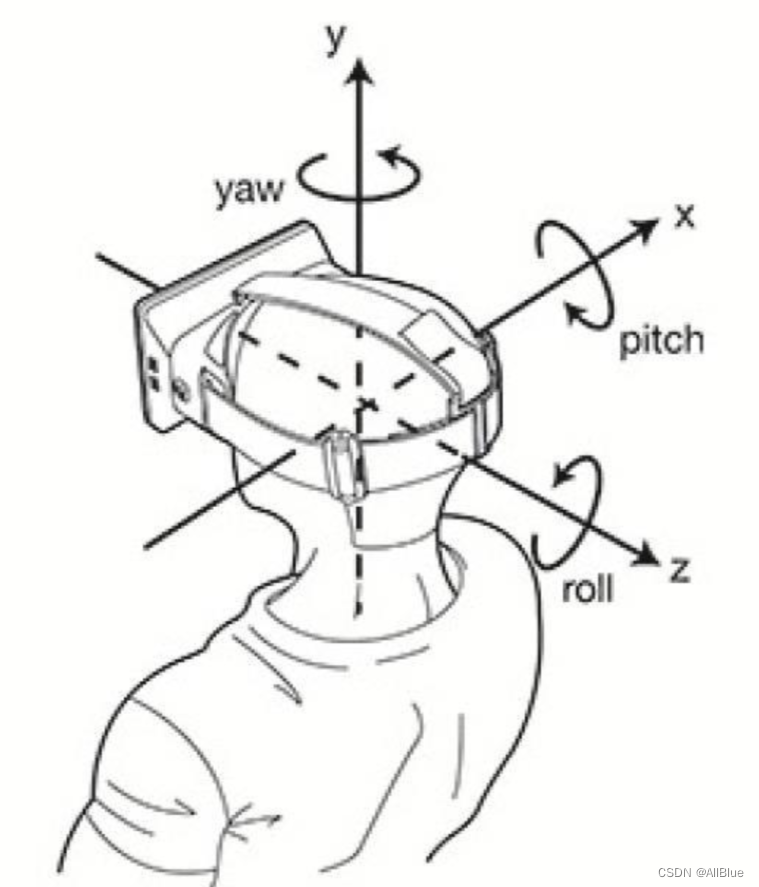
Heading=yaw,表示相机绕Up轴旋转,Up轴为+Z轴,且定义绕-Z轴旋转为正。
Pitch,表示相机绕Right轴旋转,Right轴为-Y轴,且定义绕-Y轴旋转为正。
Roll,表示相机绕Direction轴(视线方向)旋转,Direction轴为+X轴,且绕+X轴旋转为正。
需要注意的是,Heading和Pitch的旋转角度与普通右手旋转的符号相反,因此在计算中需要在前两个角度加上负号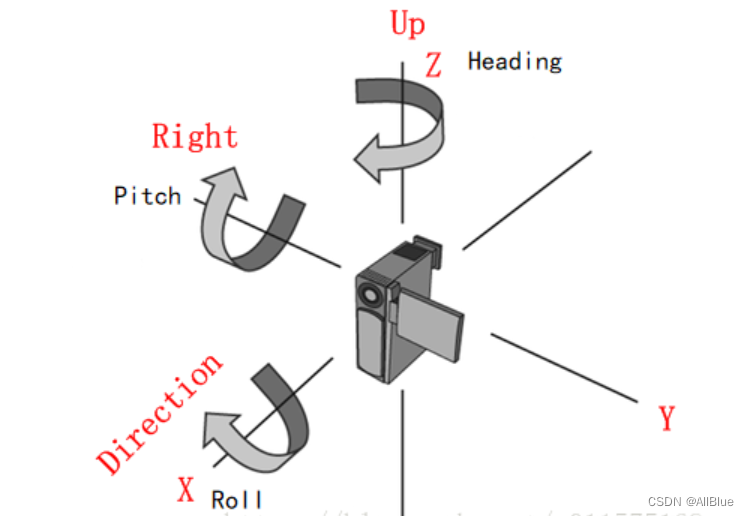
六、threejs坐标轴:y轴向上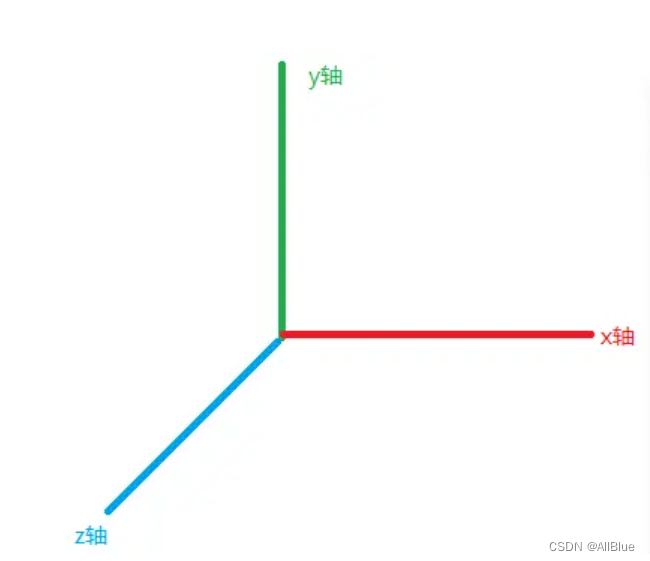
这篇关于cesium mapboxgl+threebox glb 朝向问题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






