本文主要是介绍智能汽车竞赛摄像头处理(3)——动态阈值二值化(大津法),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言
(1)在上一节中,我们学习了对图像的固定二值化处理,可以将原始图像处理成二值化的黑白图像,这里面的本质就是将原来的二维数组进行了处理,处理后的二维数组里的元素都是0和255两个值。
(2)固定阈值二值化的使用是比赛过程中,每一处地方的二值化阈值都是同一个值,而赛道的不同地方以同一个阈值二值化出来的图像可能不合适,甚至不能正常循迹。
(3)为了适应赛道上的不同环境,很多同学会采用动态二值化,即对于采集到的不同图像,通过算法计算出合适的阈值来进行二值化处理,最后的二值化效果可能会比固定阈值化好一些(因为也有不少同学在比赛中采用固定阈值二值化处理,最后拿到了国奖,所以哪个方法更好,还真不好说,主要根据实际情况看自己的作品)。
(4)毋庸置疑,大津法会增加算法处理,处理时间肯定比固定阈值二值化长。
概念
对于图像处理入门,建议大家可以去看这篇文章
详解-OTUS(大津法-最大类间方差)原理及C语言代码实现-CSDN博客
但是,你不想看也没关系,请继续看我后面的内容,你只需要理解到一个点:大津法就是一个对二维数组处理后会得到一个值的算法,而这个值就是我们二值化要的阈值。想要搞清楚大津法原理,请移步上面的文章进行学习,我这里只进行简要介绍。
大津法
大津法阈值采用最大类间方差的原理,适合于图像灰度分布整体呈现“双峰”的情况。大津法会自动找出一个阈值,使得分割后的两部分类间方差最大。
最大类间方差是由日本学者大津(Nobuyuki Otsu)于1979年提出,是一种确定图像二值化分割阈值的算法。算法假设图像像素能够根据全局阈值,被分成背景[background]和目标[objects]两部分。然后,计算该最佳阈值来区分这两类像素,使得两类像素区分度最大。
大津法阈值采用最大类间方差的原理,适合于图像灰度分布整体呈现“双峰”的情况。大津法会自动找出一个阈值,使得分割后的两部分类间方差最大。
特性:
- 大津法对噪音十分敏感,在处理之前应对图片进行去噪处理。如果图像有存在局部噪声,则会影响大津法的判断
- 当目标与背景的面积比例悬殊的时候,类间方差函数可能呈现双峰或者多峰,这个时候 大津法的效果不好
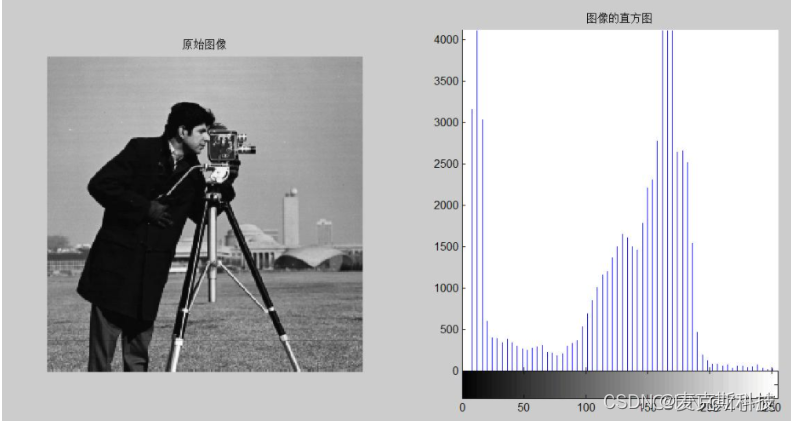
(1)双峰图像,目标和背景面积差距不大,可以很好的判断,如下:
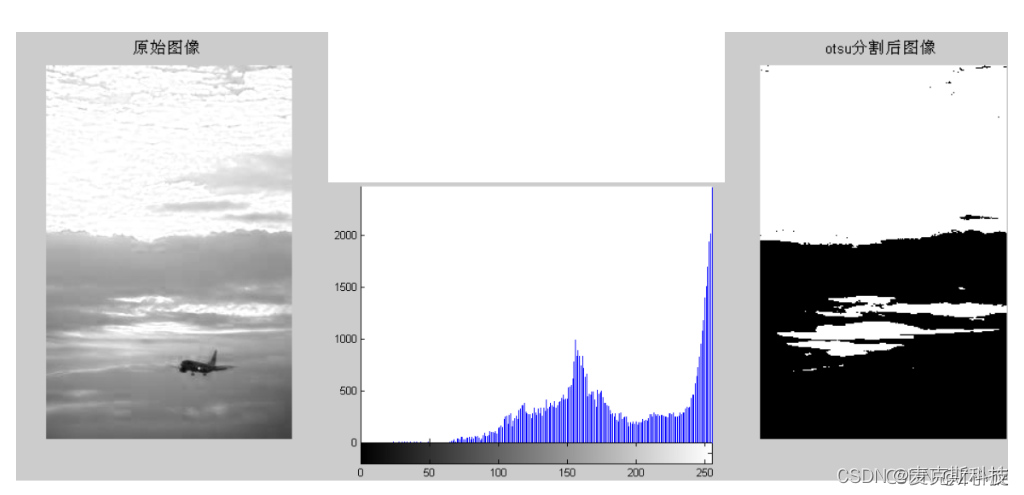
(2)当图像中的目标与背景的面积相差很大时,灰度直方图没有明显的双峰,或者两个峰的大小相差很大,分割效果不佳:
代码实现
一般大津法代码如下:
(你只需要将我的代码复制粘贴到images.c文件中,把这个函数在cpu1.c中调用即可)
images.c
#include "zf_common_headfile.h"uint8 mt9v03x_image_BandW[MT9V03X_H][MT9V03X_W];/*begin 大津法比赛 begin*/
//快速大津法二值化 pixelSum = width * height/4;
//-------------------------------------------------------------------------------------------------------------------
// @brief 快速大津
// @return uint8
// @since v1.1
// Sample usage: OTSU_Threshold = otsuThreshold(mt9v03x_image_dvp[0]);//大津法阈值
//-------------------------------------------------------------------------------------------------------------------
uint8 otsuThreshold_fast(uint8 *image) //注意计算阈值的一定要是原图像
{
#define GrayScale 256int Pixel_Max=0;int Pixel_Min=255;uint16 width = MT9V03X_W; //宽100uint16 height = MT9V03X_H; //高80int pixelCount[GrayScale]; //各像素GrayScale的个数pixelCount 一维数组float pixelPro[GrayScale]; //各像素GrayScale所占百分比pixelPro 一维数组int i, j, pixelSum = width * height/4; //pixelSum是获取总的图像像素个数的1/4,相应下面轮询时高和宽都是以2为单位自增uint8 threshold = 0;
// uint8 last_threshold = 0;uint8* data = image; //指向像素数据的指针//清零for (i = 0; i < GrayScale; i++){pixelCount[i] = 0;pixelPro[i] = 0;}uint32 gray_sum=0; //每次执行到这会将gray_sum清零//统计灰度级中每个像素在整幅图像中的个数for (i = 0; i < height; i+=2) //高{for (j = 0; j < width; j+=2) //宽{pixelCount[(int)data[i * width + j]]++; //将当前的点的像素值作为计数数组的下标gray_sum+=(int)data[i * width + j]; //灰度值总和if(data[i * width + j]>Pixel_Max) Pixel_Max=data[i * width + j];if(data[i * width + j]<Pixel_Min) Pixel_Min=data[i * width + j];}}//计算每个像素值的点在整幅图像中的比例for (i = Pixel_Min; i < Pixel_Max; i++){pixelPro[i] = (float)pixelCount[i] / pixelSum;}//遍历灰度级[0,255]float w0, w1, u0tmp, u1tmp, u0, u1, u, deltaTmp, deltaMax = 0;w0 = w1 = u0tmp = u1tmp = u0 = u1 = u = deltaTmp = 0;for (j = Pixel_Min; j < Pixel_Max; j++){w0 += pixelPro[j]; //背景部分每个灰度值的像素点所占比例之和 即背景部分的比例u0tmp += j * pixelPro[j]; //背景部分 每个灰度值的点的比例 *灰度值w1=1-w0;u1tmp=gray_sum/pixelSum-u0tmp;u0 = u0tmp / w0; //背景平均灰度u1 = u1tmp / w1; //前景平均灰度u = u0tmp + u1tmp; //全局平均灰度deltaTmp = (float)(w0 *w1* (u0 - u1)* (u0 - u1)) ;if (deltaTmp > deltaMax){deltaMax = deltaTmp;threshold = (uint8)j;}if (deltaTmp < deltaMax){break;}}return threshold;
}
/*end 大津法比赛 end*//*begin 大津法学习 begin*/
//------------------摄像头参数--------------//
uint8 image_threshold = 46; //图像阈值 0~255
uint8 dis_image[60][80];uint8 otsuThreshold(uint8 *image, uint16 width, uint16 height)
{#define GrayScale 256int pixelCount[GrayScale] = {0};//每个灰度值所占像素个数float pixelPro[GrayScale] = {0};//每个灰度值所占总像素比例int i,j;int Sumpix = width * height; //总像素点uint8 threshold = 0;uint8* data = image; //指向像素数据的指针//统计灰度级中每个像素在整幅图像中的个数for (i = 0; i < height; i++){for (j = 0; j < width; j++){pixelCount[(int)data[i * width + j]]++; //将像素值作为计数数组的下标// pixelCount[(int)image[i][j]]++; 若不用指针用这个}}float u = 0;for (i = 0; i < GrayScale; i++){pixelPro[i] = (float)pixelCount[i] / Sumpix; //计算每个像素在整幅图像中的比例u += i * pixelPro[i]; //总平均灰度}float maxVariance=0.0; //最大类间方差float w0 = 0, avgValue = 0; //w0 前景比例 ,avgValue 前景平均灰度for(i = 0; i < 256; i++) //每一次循环都是一次完整类间方差计算 (两个for叠加为1个){w0 += pixelPro[i]; //假设当前灰度i为阈值, 0~i 灰度像素所占整幅图像的比例即前景比例avgValue += i * pixelPro[i];float variance = pow((avgValue/w0 - u), 2) * w0 /(1 - w0); //类间方差if(variance > maxVariance){maxVariance = variance;threshold = (uint8)i;}}return threshold;
}/*end 大津法学习 end*///图像二值化
//0 - 255
//黑 - 白
void Set_image_towvalues(uint8 value)
{uint8 temp_valude;//暂存灰度值for(uint8 i = 0;i < MT9V03X_H;i++)//高{for(uint8 j = 0;j < MT9V03X_W;j++)//宽{temp_valude = mt9v03x_image[i][j];if(temp_valude < value){mt9v03x_image_BandW[i][j] = 0;//黑}else{mt9v03x_image_BandW[i][j] = 255;//白}}}
}images.h
#ifndef CODE_IMAGES_H_
#define CODE_IMAGES_H_extern uint8 mt9v03x_image_BandW[MT9V03X_H][MT9V03X_W];void Set_image_towvalues(uint8 value);
uint8 otsuThreshold(uint8 *image, uint16 width, uint16 height);
uint8 otsuThreshold_fast(uint8 *image);
#endif /* CODE_IMAGES_H_ */但是不优化大津法的代码,图像处理时间较长,所以大家又将“大津法”优化成了“快速大津法”,代码也在上面公布了,照我如下调用即可。
cpu1.c
void core1_main(void)
{disable_Watchdog(); // 关闭看门狗interrupt_global_enable(0); // 打开全局中断// 此处编写用户代码 例如外设初始化代码等mt9v03x_init();//初始化摄像头// 此处编写用户代码 例如外设初始化代码等cpu_wait_event_ready(); // 等待所有核心初始化完毕while (TRUE){// 此处编写需要循环执行的代码TFT180_SHOW();if(mt9v03x_finish_flag) //一幅图像完全采集完毕后,再进行图像的显示判断和显示{//Set_image_towvalues(150); //固定阈值二值化BandW_threshold = otsuThreshold_fast(mt9v03x_image[0]);//大津法得到动态阈值BandW_thresholdSet_image_towvalues(BandW_threshold); //动态阈值二值化得到二维数组mt9v03x_image_BandWtft180_displayimage03x(mt9v03x_image_BandW[0],MT9V03X_W,MT9V03X_H);//显示二值化后的图像mt9v03x_finish_flag = 0;//图像显示完成后才对标志位清零}// 此处编写需要循环执行的代码}
}通过调用大津法处理函数,将原始图像进行动态阈值二值化处理,也是会在显示屏上得到黑白图像,固定阈值二值化和动态阈值二值化处理哪个效果好,还得看实际情况。
这篇关于智能汽车竞赛摄像头处理(3)——动态阈值二值化(大津法)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





