本文主要是介绍【Xiang哥避坑指南】YOLOV5只在CPU跑不在GPU跑的问题。,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
电脑明明有GPU,深度学习视觉代码也运行起来了,为什么只在CPU跑,GPU并不占用呢,可能有的同学会有这种经历。
本人就是被困扰了一个月,不知道为什么只在CPU跑,最后偶然发现:
那可能就是CUDA、pytorch、torchvison三者版本不对应的问题,也可能是版本下错的问题。
CUDA、pytorch、torchvision版本一定要对应!!!
CUDA、pytorch、torchvision版本一定要对应!!!
CUDA、pytorch、torchvision版本一定要对应!!!(重要的事情说三遍)
这里强调一下,以下的查看不要忘记在特定虚拟环境下,或者你要运行程序/代码的环境下!(当然我们经常跑代码也要养成建立虚拟环境的好习惯。什么?不知道虚拟环境?请自行白百度!)
1.如何查看CUDA、pytorch、torchvision三者版本?
1.1 CUDA版本查看
Windows&Linux 系统下,输入命令:nvcc -V。
注意:一定要是小写、空格-V。(我的就是10.0版本的CUDA)

1.2 Pytorch版本查看
这里介绍两种方法:
A:
//终端-输入pythonimport torch
print(torch.__version__)
#上方的_是两个 杠杠

B:
// 终端输入python
pip list
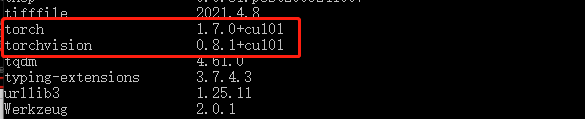
再次强调:+cu101是适应于CUDA10.1,同理,+cu102适应于CUDA10.2,以此类推。
(有的时候这个版本如果安装的是+CPU的,也会不能在GPU跑,因为默认就是在CPU跑的。)
1.3 torchvision版本查看
方法与1.2一致,这里只做说明,不做演示。
A:
//终端-输入pythonimport torchvision
print(torchvision.__version__)
#上方的_是两个 杠杠
B:
同1.2 B,已经在截图里面。
好了,到此呢,我们就知道CUDA、Pytorch、torchvision三者的版本啦~
下面就要开始确认三者版本是否兼容了!
2.CUDA、pytorch、torchvision版本对应关系是?
方法A:

(转自:https://blog.csdn.net/weixin_43528564/article/details/120745593)谢谢~
方法B:
官网查看: Pytorch官网.
查看方法:

3.版本确定了,如何安装&下载?
a.这里不介绍CUDA的安装,如果大家已经安装好了CUDA,那么建议删除错误的pytorch和torchvision版本,CUDA的删除和安装更加复杂。
b.BUT,CUDA的版本要看显卡的型号,不过大家如果能装成功CUDA这一条应该也不存在什么问题。
方法1:
下载: 版本大全网站(包含Pytorch&torchvision).
这个方法是使用
版本很多,大家可以利用Ctrl + F来进行快速定位。
下面这个就是适合CPU的,安装以后就是+CPU。

下面这张就是适用于CUDA10.1的Pytorch-1.7.0版本。
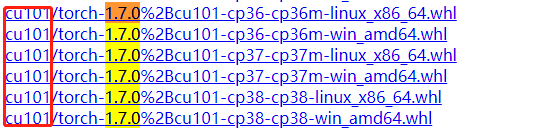
torchvision同理,就不过多赘述了。
安装(Pytorch & torchvision同理):
点击要下载的版本后会自动下载,下载的是一个.whl文件,需要用pip命令来安装:
// 在下载的路径下打开终端窗口
pip torch-1.8.1+cu111-cp38-cp38-win_amd64.whl
//回车后自动安装
方法2(pip 安装):
// 在下载的路径下打开终端窗口
//(有虚拟环境记得打开虚拟环境)
pip install torch==1.7.0+cu101 torchvision==0.8.1+cu101 #大家可以根据自己的需要变更版本
//回车后自动安装
如果网速不好,可以加一个镜像(pip安装可以默认镜像,修改系统文件,大家有需要可以自行CSDN):
pip install torch==1.7.0+cu101 torchvision==0.8.1+cu101 -i https://pypi.tuna.tsinghua.edu.cn/simpl
//回车后自动安装
好啦,这次踩坑经历就分享到这里~
有更多疑问可以私信或者评论,我都会回复的。
下一期打算出个NVIDIA JETSON TX2 运行YOLOV5踩坑之旅~
这篇关于【Xiang哥避坑指南】YOLOV5只在CPU跑不在GPU跑的问题。的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







