本文主要是介绍(2)(2.10) LTM telemetry,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
前言
1 协议概述
2 配置
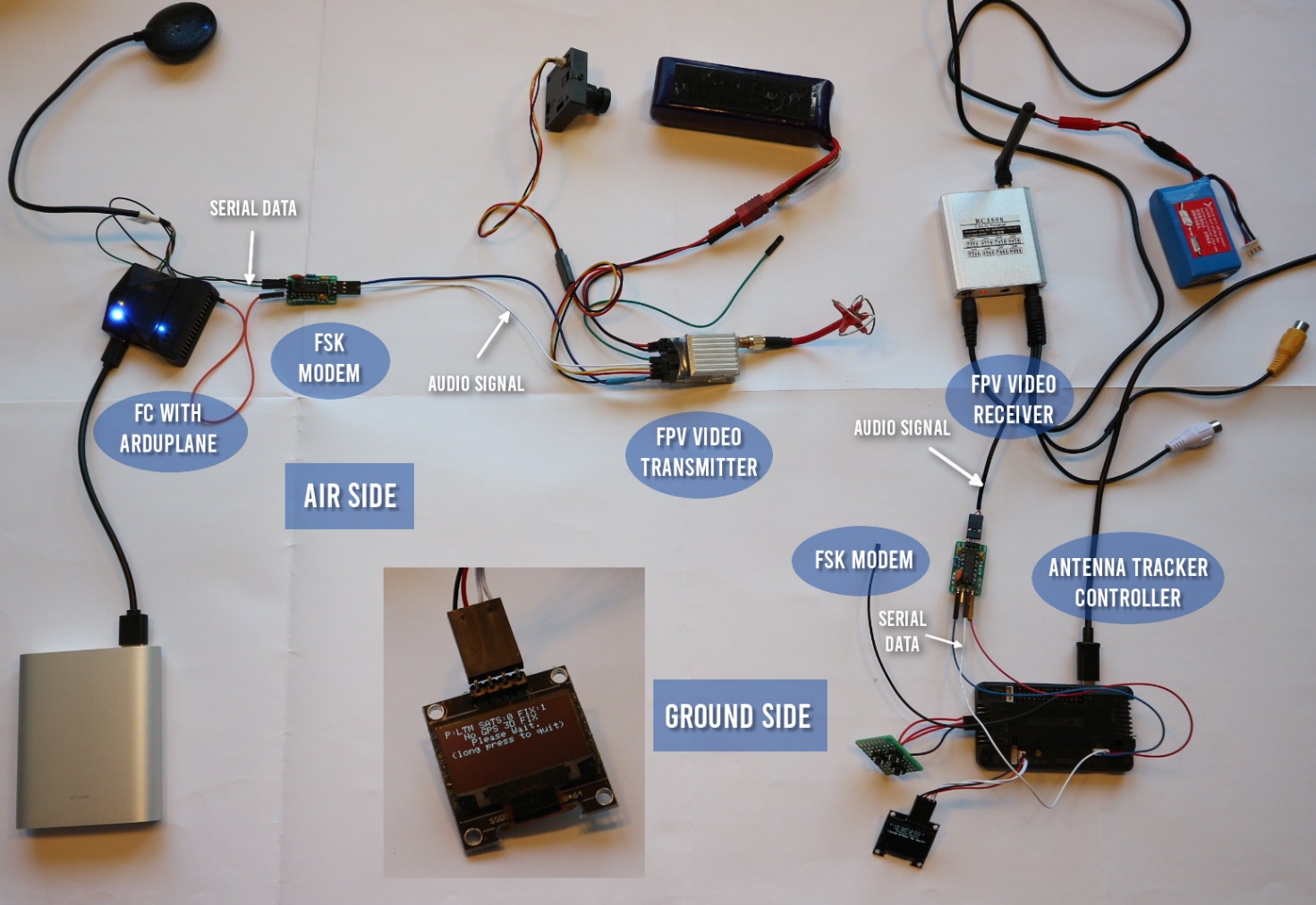
3 带FPV视频发射器的使用示例
4 使用TCM3105的FSK调制解调器示例
前言
轻量级 TeleMetry 协议 (LTM) 是一种单向通信协议(从飞行器下行的数据链路),可让你以低带宽/低波特率(通常为 2400 波特)发送最重要的飞行器数据。
1 协议概述
轻量级 TeleMetry 协议 (LTM) 是一种单向通信协议(从飞行器下行的数据链路),可让你以低带宽/低波特率(通常为 2400 波特)发送最重要的飞行器数据。
协议由 KipK 引入,在他的贫民窟站中使用。
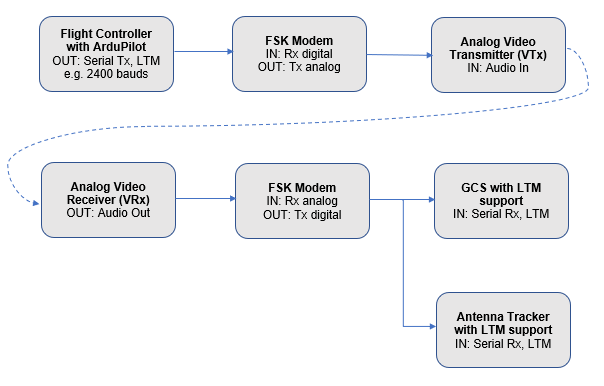
典型的使用案例是天线跟踪,当来自飞行控制器(FC)的串行遥测数据被频移键控调制(FSK)调制解调器转换为某种音频信号,通过视频发射器的音频通道传输到地面视频接收器时。然后由其他 FSK 调制解调器将其转换回数字信号,并在天线跟踪器 (AT) 中进行处理,也可能在地面控制站 (GCS) 中进行处理。
在 ardupilot 端执行的协议帧类型。
1. G-Frame (GPS)
- 包含经度、纬度、GPS 地面速度、可见卫星数量、GPS 定位类型;
- 大小为 18 字节,发送频率为 2Hz。
2. A-Frame (Attitude)
- 包含飞行器姿态、航向;
- 10B / 5 Hz。
3. S-Frame (Status)
- 包含电池电压、电流、接收器 RSSI、AHRS 提供的空速;
- 11B / 2 Hz。
协议限制:
GPS 定位数据类型仅使用 2 位 - 可能的值列表为 0(无 GPS 定位)、1(2D 定位)、2(3D 定位)。超过 2 的 GPS 定位值将映射到值 2。
与 LTM 遥测有关的链接:
- GhettoStation 天线跟踪器:https://github.com/KipK/Ghettostation;
- LTM 协议的 iNAV 文档:https://github.com/iNavFlight/inav/wiki/Lightweight-Telemetry-(LTM);
- 协议概述请访问 quadmeup.com:LTM - Light Telemetry Protocol | QuadMeUp;
- 用于 Arduino ProMini 或 ESP8266 的 LTM 至 MAVLink 转换器:https://github.com/vierfuffzig/LTM2MAVLink。
2 配置
必须将参数 SERIALX_PROTOCOL 设为 25,才能在给定串行端口上启用 FC 的 LTM 输出。请注意,只支持一个 LTM 输出端口。如果将多个串行端口设置为 LTM 输出端口,则只有在串行驱动程序初始化过程中找到的第一个串行端口才会被分配为 LTM 遥测输出端口。

!Note
不要忘记将 LTM 遥测端口的波特率设置为适当的值。如果使用 FSK 调制解调器,波特率值取决于调制解调器的性能。
此外,并非所有自动驾驶仪的串行端口都支持 1(= 1200 波特)的最低波特率设置。在基于 STM32F4xx 和 F7xx 的自动驾驶仪上,这些串行端口通常是 USART 1 和 6,在整个系统时钟上运行。如果设置为 1200 波特,这些端口将默认为 19200 波特。如果在 1200 波特下无法获得正确的 LTM 遥测输出,请尝试使用 USART 1 或 6 以外的串行端口,或者选择 2400 波特。在基于 STM32H7 的电路板上,2400 波特是支持的最低 UART 波特率。有关 UART 到 SERIALn 映射的更多信息,请查看飞行控制器的硬件页面。
3 带FPV视频发射器的使用示例
4 使用TCM3105的FSK调制解调器示例
使用 TCM3105 芯片是 FSK 调制解调器的可能性之一。调制解调器原理图和电路板的 Eagle 文件可在 https://github.com/kh4/FSK_modem 上找到。
该调制解调器可在 1200 或 2400 波特率下工作,波特率取决于所使用的振荡器。

使用 TCM3105 的 FSK 调制解调器示意图示例
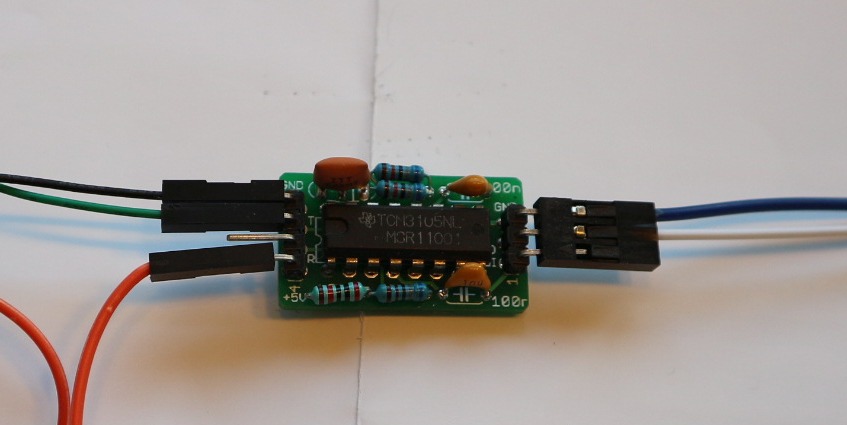
使用 TCM3105 的 FSK 调制解调器照片
!Tip
使用 8 MHz 振荡器使调制解调器以 2400 波特工作。
这篇关于(2)(2.10) LTM telemetry的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!