telemetry专题

Microsoft Compatibility Telemetry占用系统cpu
电脑突然卡死,cpu直线飙升。打开任务管理器查看发现Microsoft Compatibility Telemetry进程占用了过多的cpu和磁盘,那面这个进程是干什么的呢? 方法/步骤 Microsoft Compatibility Telemetry是微软下的一个监测数据收集服务,如果加入microsoft 客户反馈改善计划,该服务就会在监测系统异常并收集反馈到微软。 一般我们肯定要
OCP NVME SSD规范解读-12.Telemetry日志要求
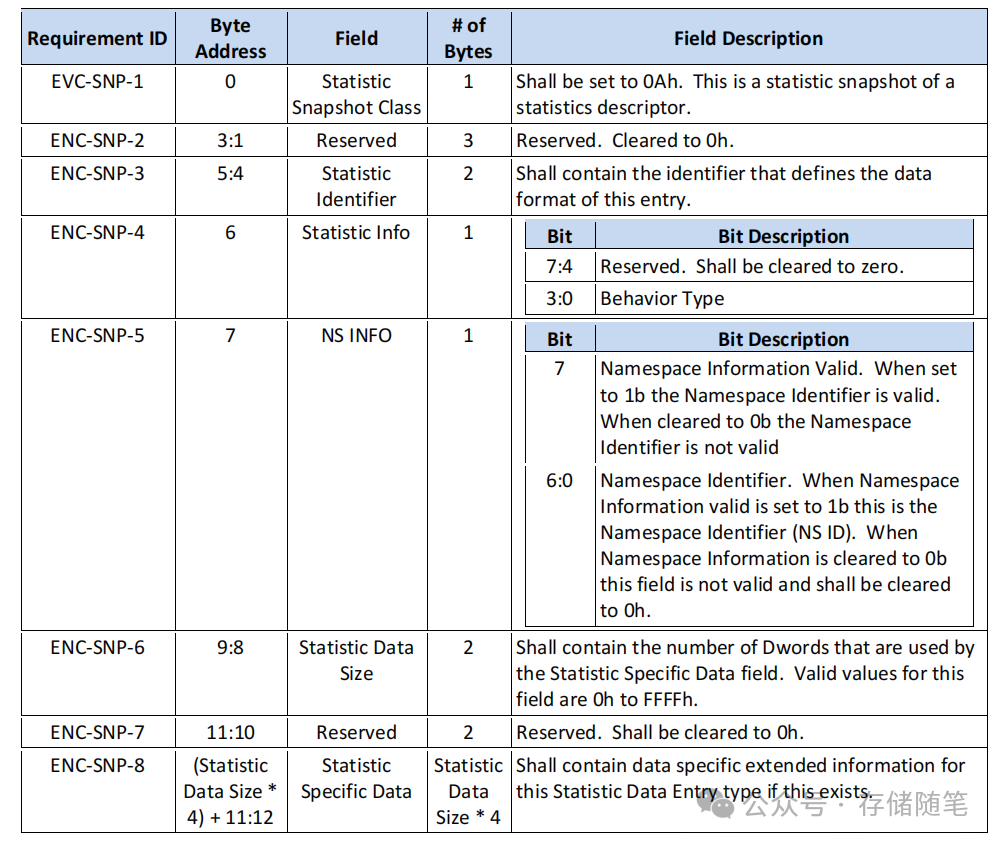
以NVME SSD为例,通常大家想到的是观察SMAR-log定位异常,但是这个信息在多数情况下无法只能支撑完整的定位链路。 定位能力的缺失和低效是数据中心问题解决最大的障碍。 为了解决这个问题,Meta的做法是推进OCP组织加入延迟记录页面。同时NVME协议也增加了Telemetry盘片的故障定位能力。 4.9章节详述了主机和控制器触发的Telemetry日志

(2)(2.14) SPL Satellite Telemetry
文章目录 前言 1 本地 Wi-Fi(费用:30 美元以上,范围:室内) 2 蜂窝电话(费用:100 美元以上,范围:蜂窝电话覆盖区域) 3 手机+卫星(费用:400 美元以上,范围:全球) 前言 直接无线电遥测通信链路只能在可视视线范围内使用。如果你的 UV 需要在视线范围之外保持连接,则需要使用某种转发器,如手机信号塔或通信卫星。除非你能负担得起专用通道的费用,否则蜂窝或卫星通
(2)(2.10) LTM telemetry
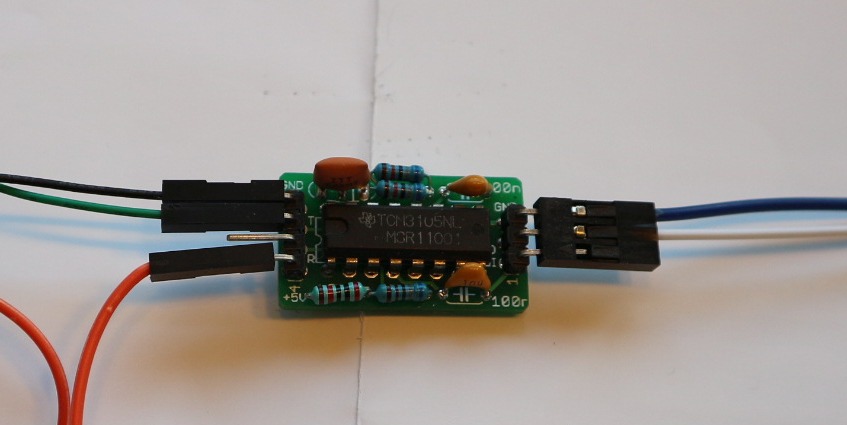
文章目录 前言 1 协议概述 2 配置 3 带FPV视频发射器的使用示例 4 使用TCM3105的FSK调制解调器示例 前言 轻量级 TeleMetry 协议 (LTM) 是一种单向通信协议(从飞行器下行的数据链路),可让你以低带宽/低波特率(通常为 2400 波特)发送最重要的飞行器数据。 1 协议概述 轻量级 TeleMetry 协议 (LTM) 是一种单向通信协议(
(2)(2.4) CRSF/ELRS Telemetry
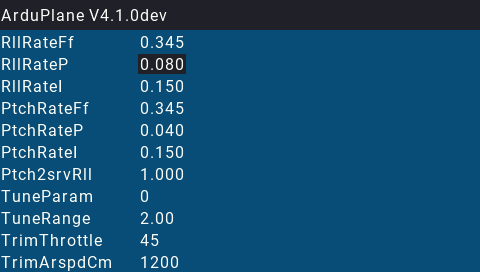
文章目录 前言 1 ArduPilot 参数编辑器 前言 !Note ELRS(ExpressLRS)遥控系统使用穿越火线协议,连接方式类似。不过,它不像穿越火线那样提供双向遥测。 TBS CRSF 接收机与 ArduPilot 的接口中包含遥测和遥控信息。ArduPilot 支持本机 CRSF 遥测及其扩展,允许使用用于 OpenTX 的 Yaapu FrSky 遥测脚本(
(1)(1.7) HOTT telemetry
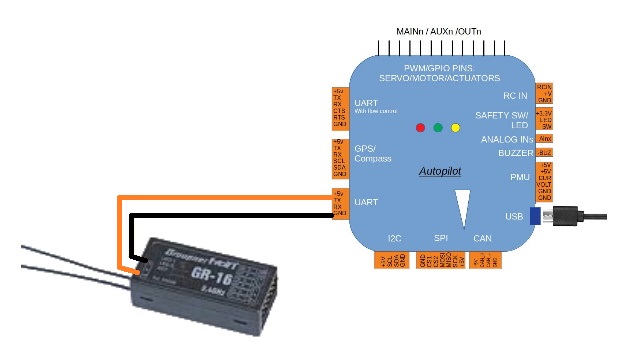
文章目录 前言 1 布线和设置 2 参数说明 前言 Plane-4.0.0(及更高版本)、Copter-4.0.4(及更高版本)和 Rover-4.1.0(及更高版本)支持 Graupner HOTT 遥测技术。 1 布线和设置 与自动驾驶仪的连接可通过任何 UART 端口的 TX 输入进行,但不带 RTS/CTS 流量控制的端口配置更简单,因为不需要流量控制。

(1)(1.5) FrSky telemetry
文章目录 前言 1 设置 2 Turnigy 9XR Pro 前言 FrSky 遥测技术允许你显示 ArduPilot 的信息,如飞行模式、电池电量和错误信息,以及来自 OpenTx 兼容遥控发射机上其他 FrSky 传感器的信息,甚至包括较旧的 X9R 发射机(尽管功能较为有限)。 它尤其有用: 用于在没有地面控制站的情况下飞行(无需 MAVLink 遥测无线电);作为地面

(1)(1.4) ESP32 wifi telemetry
文章目录 前言 1 用于ESP32的DroneBridge 2 推荐的硬件 3 下载和烧录固件 4 为ESP32配置DroneBridge 前言 ESP32 是现成的 Wi-Fi 模块,具有完整的 TCP/IP 协议栈和微控制器功能。它们提供专用的 UART、SPI 和 I2C 接口。它们可与任何 ArduPilot 自动驾驶控制器配合使用。 1 用于ESP32的Drone

CXL QoS Telemetry 介绍
🔥点击查看精选 CXL 系列文章🔥 🔥点击进入【芯片设计验证】社区,查看更多精彩内容🔥 📢 声明: 🥭 作者主页:【MangoPapa的CSDN主页】。⚠️ 本文首发于CSDN,转载或引用请注明出处【https://mangopapa.blog.csdn.net/article/details/131745195】。⚠️ 本文目的为 个人学习记录 及 知识分享。因