本文主要是介绍Mangopi MQ-R:T113-s3(四)Tina系统 适配LCD屏幕,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 适配LCD
- 调试LCD
- 满屏雪花
- 清屏
- 测试色条显示
- 适配电容触摸屏
- 配置内核模块
- 配置Kernel的设备树
- 配置文件系统
参考大佬:https://www.gloomyghost.com/live/20220808.aspx
$ source build/envsetup.sh$ lunch- 选择开发板:
$ 7 - 编译:
$ make - 打包boot0和uboot为一个文件:
$ mboot - 打包成一个.img镜像:
$ pack
打包好的地址为:/Tina-Linux/out/t113-mq_r/tina_t113-mq_r_uart0.img
使用phoenixcard4.2.8.zip烧录启动卡到SD卡里面去
适配LCD
注意需要重新适配两个设备树
修改Linux Kernel的设备树:Tina-Linux/device/config/chips/t113/configs/mq_r/board.dts
修改Uboot的设备树:Tina-Linux/device/config/chips/t113/configs/mq_r/uboot-board.dts
原版的:我的五寸屏幕会闪屏,需要修改适配!
当我们配置并行 RGB 接口时,在配置里面并不需要区分是 24 位,18 位和 16 位,最大位宽是哪种是参考 pin mux 表格,如果 LCD 屏本身支持的位宽比 SoC 支持的位宽少,当然只能选择少的一方。
因为不需要初始化,RGB 接口极少出现问题,重点关注 lcd 的 timing 的合理性,也就是lcd_ht,lcd_hspw,lcd_hbp,lcd_vt,lcd_vspw和lcd_vbp这个属性的合理性。
&lcd0 {
/* part 1 */
lcd_used = <1>;
lcd_driver_name = "default_lcd";/* part 2 */
lcd_if = <0>;
lcd_hv_if = <0>;/* part 3 */
lcd_width = <150>;
lcd_height = <94>;
lcd_x = <800>;
lcd_y = <480>;
lcd_dclk_freq = <33>;
lcd_hbp = <46>;
lcd_ht = <1055>;
lcd_hspw = <0>;
lcd_vbp = <23>;
lcd_vt = <525>;
lcd_vspw = <0>;/* part 4 */
lcd_backlight = <50>;
lcd_pwm_used = <1>;
lcd_pwm_ch = <8>;
lcd_pwm_freq = <10000>;
lcd_pwm_pol = <1>;
lcd_bl_en = <&pio PD 27 1 0 3 1>;
lcd_bright_curve_en = <0>;/* part 5 */
lcd_frm = <0>;
lcd_io_phase = <0x0000>;
lcd_gamma_en = <0>;
lcd_cmap_en = <0>;
lcd_hv_clk_phase = <0>;
lcd_hv_sync_polarity= <0>;/* part 6 */
lcd_power = "vcc-lcd";
lcd_pin_power = "vcc-pd";
pinctrl-0 = <&rgb24_pins_a>;
pinctrl-1 = <&rgb24_pins_b>;
};
上面是典型并行 RGB 接口 board.dts 配置示例,其中用空行把配置分成几个部分
- 第一部分,决定该配置是否使用,以及使用哪个屏驱动,lcd_driver_name 决定了用哪个屏驱动来初始化,这里是 default_lcd,是针对不需要初始化设置的 RGB 屏
- 第二部分决定下面的配置是一个并行 RGB 的配置。
- 第三部分决定了 SoC 中的 LCD 模块发送时序,请查看屏时序参数说明。
- 第四部分决定了背光(pwm 和 lcd_bl_en)。请看背光相关参数。
- 第五部分是显示效果部分的配置,如果非 24 位的 RGB,那么一般情况下需要设置lcd_frm。
- 第六部分就是电源和管脚配置。是用 RGB666 还是 RGB888,需要根据实际 pinmux 表来决定,如果该芯片只有 18 根 rgb 数据则只能 rgb18。请看电源和管脚参数。
屏幕参数:
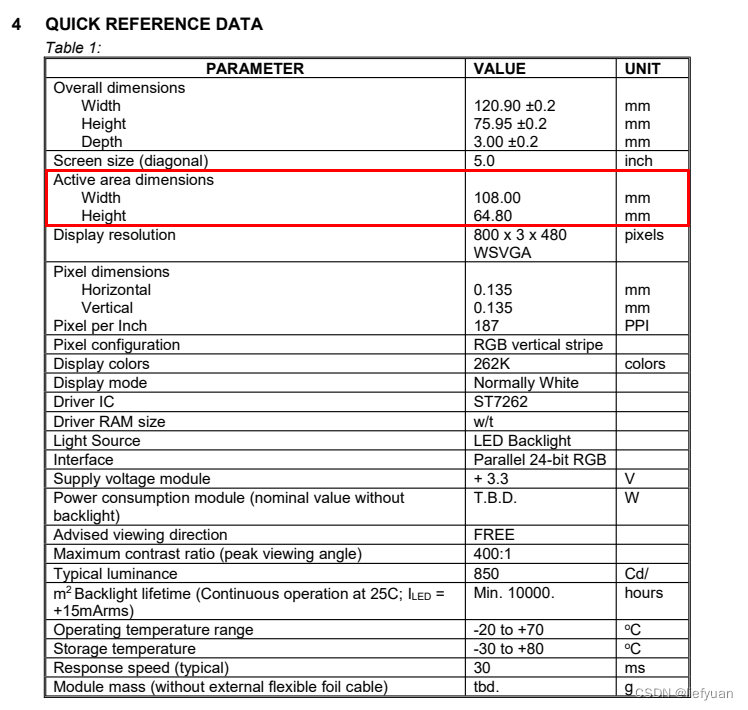

照着屏幕规格书写的设备树:
&lcd0 {lcd_used = <1>; // 启用lcdlcd_driver_name = "default_lcd"; // 使用 default_lcd 驱动lcd_backlight = <50>;lcd_if = <0>; // 0:rgb 4:dsi// Part 1lcd_x = <800>; // 宽度lcd_y = <480>; // 高度lcd_width = <108>; // 屏幕物理宽度,单位 mmlcd_height = <65>; // 屏幕物理高度,单位 mm// Part 2lcd_pwm_used = <1>; // 启用背光 PWMlcd_pwm_ch = <7>; // 使用 PWM 通道 7lcd_pwm_freq = <50000>; // PWM 频率,单位 Hzlcd_pwm_pol = <0>; // 背光 PWM 的极性lcd_pwm_max_limit = <255>; // 背光 PWM 的最大值(<=255)// Part 3 lcd_dclk_freq = <29>; // 屏幕时钟,单位 MHzlcd_ht = <928>; // hsync total cycle(pixel)lcd_hbp = <88>; // hsync back porch(pixel) + hsync plus width(pixel);lcd_hspw = <48>; // hsync plus width(pixel)lcd_vt = <525>; // vsync total cycle(line)lcd_vbp = <32>; // vsync back porch(line) + vysnc plus width(line)lcd_vspw = <1>; // vsync plus width(pixel)// Part 4lcd_lvds_if = <0>;lcd_lvds_colordepth = <1>;lcd_lvds_mode = <0>;lcd_frm = <0>; // 0:关闭; 1:启用rgb666抖动; 2:启用rgb656抖动lcd_io_phase = <0x0000>;lcd_gamma_en = <0>;lcd_bright_curve_en = <0>;lcd_cmap_en = <0>;deu_mode = <0>;lcdgamma4iep = <22>;smart_color = <90>;// Part 5pinctrl-0 = <&rgb18_pins_a>;pinctrl-1 = <&rgb18_pins_b>;
};
/Tina-Linux/lichee/linux-5.4/arch/arm/boot/dts/sun8iw20p1.dtsi
rgb18_pins_a: rgb18@0 {pins = "PD0", "PD1", "PD2", "PD3", "PD4", "PD5", \"PD6", "PD7", "PD8", "PD9", "PD10", "PD11", \"PD12", "PD13", "PD14", "PD15", "PD16", "PD17", \"PD18", "PD19", "PD20", "PD21";function = "lcd0";drive-strength = <30>;bias-disable;};rgb18_pins_b: rgb18@1 {pins = "PD0", "PD1", "PD2", "PD3", "PD4", "PD5", \"PD6", "PD7", "PD8", "PD9", "PD10", "PD11", \"PD12", "PD13", "PD14", "PD15", "PD16", "PD17", \"PD18", "PD19", "PD20", "PD21";function = "io_disabled";bias-disable;};
调试LCD
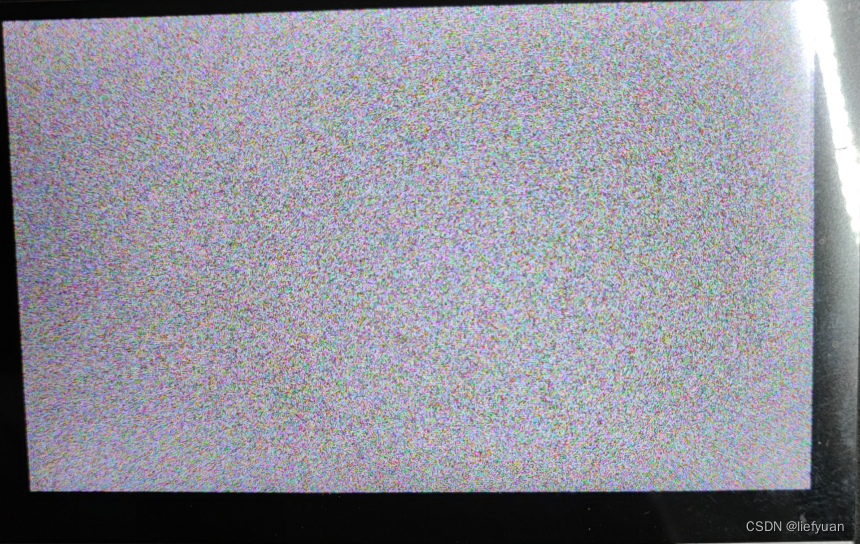
满屏雪花
cat /dev/urandom > /dev/fb0
清屏
cat /dev/zero > /dev/fb0
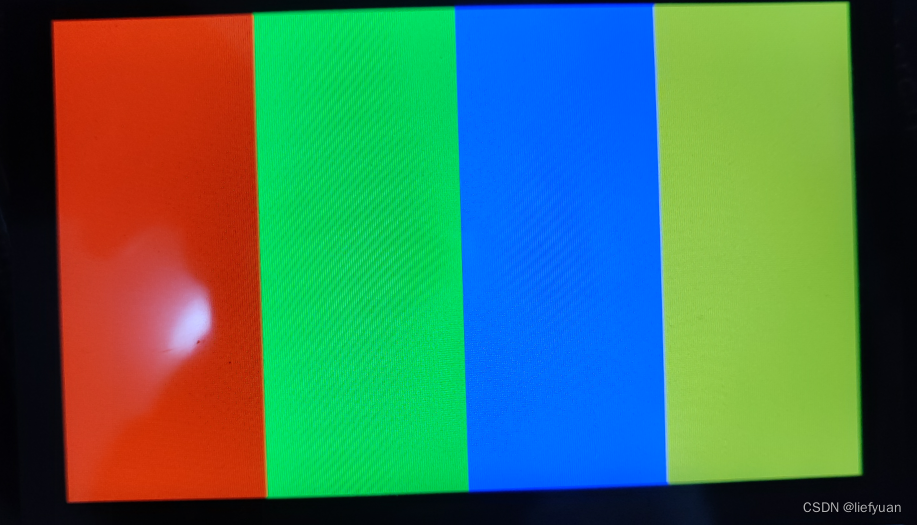
测试色条显示
echo 8 > /sys/class/disp/disp/attr/colorbar
适配电容触摸屏
我的屏幕的电容屏芯片是汇顶:GT911
配置内核模块
make kernel_menuconfig
Device Drivers ---> Input device support --->[*] Touchscreens ---><*> Goodix I2C touchscreen<*> gt9xxnew touchscreen driver
配置Kernel的设备树
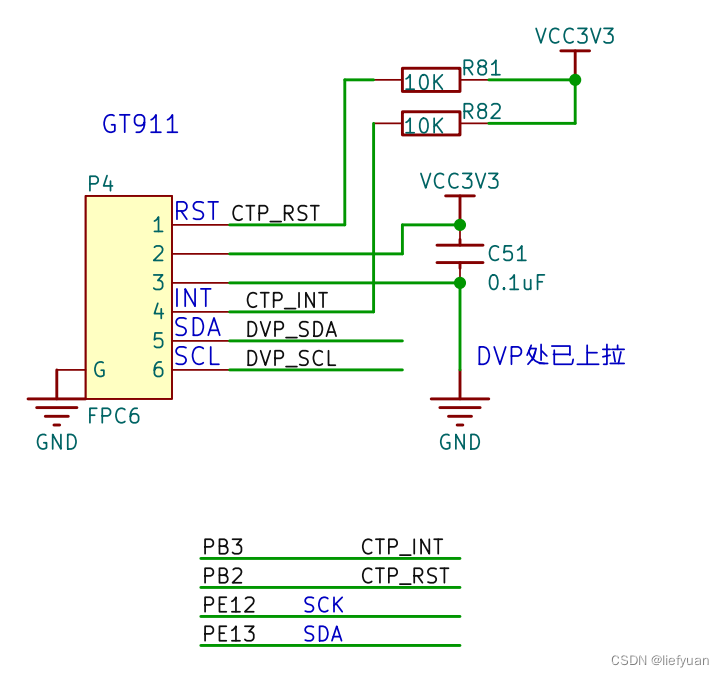
根据原理图修改一下中断引脚和复位引脚如下:
&twi2 {clock-frequency = <400000>;pinctrl-0 = <&twi2_pins_a>;pinctrl-1 = <&twi2_pins_b>;pinctrl-names = "default", "sleep";dmas = <&dma 45>, <&dma 45>;dma-names = "tx", "rx";status = "okay";/* pcf8574-usage:* only use gpio0~7, 0 means PP0.* pin set:* gpios = <&pcf8574 0 GPIO_ACTIVE_LOW>;* interrupt set:* interrupt-parent = <&pcf8574>;* interrupts = <0 IRQ_TYPE_EDGE_FALLING>;*/pcf8574: gpio@38 {compatible = "nxp,pcf8574";reg = <0x38>;gpio_base = <2020>;gpio-controller;#gpio-cells = <2>;interrupt-controller;#interrupt-cells = <2>;interrupt-parent = <&pio>;interrupts = <PB 2 IRQ_TYPE_EDGE_FALLING>;status = "disabled";};ctp@14 {compatible = "allwinner,goodix";device_type = "ctp";reg = <0x14>;status = "okay";ctp_name = "gt9xxnew_ts";ctp_twi_id = <0x2>;ctp_twi_addr = <0x14>;ctp_screen_max_x = <0x320>;ctp_screen_max_y = <0x1e0>;ctp_revert_x_flag = <0x0>;ctp_revert_y_flag = <0x0>;ctp_exchange_x_y_flag = <0x0>;ctp_int_port = <&pio PB 3 GPIO_ACTIVE_HIGH>; // 中断ctp_wakeup = <&pio PB 2 GPIO_ACTIVE_HIGH>; // 复位};
};
配置文件系统
make menuconfig
Libraries ---><*> tslib......... tslib is an abstraction layer for touchscreen panel events
上电信息
[ 3.190476] get ctp_power is fail, -22
[ 3.194658] get ctp_power_ldo_vol is fail, -22
[ 3.199665] sunxi_ctp_startup: ctp_power_io is invalid.
[ 3.205523] get ctp_gesture_wakeup fail, no gesture wakeup
[ 3.211672] gt9xxnew_ts 2-0014: 2-0014 supply ctp not found, using dummy regulator
[ 3.409439] input: gt9xxnew_ts as /devices/virtual/input/input1
设备节点
$ ls /dev/input/
event0 event1 event2 mice
这篇关于Mangopi MQ-R:T113-s3(四)Tina系统 适配LCD屏幕的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







