本文主要是介绍通过雷诺方程运用matlab求解滑靴底部油膜厚度场、压力场、剪切场及速度场,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
通过matlab建立程序求解滑靴底部密封面的压力场、剪切场及速度场
1 滑靴油膜压力场方程的建立
在圆柱坐标系下的累诺方程为:

利用五点差分法将两项展开成差分形式为:
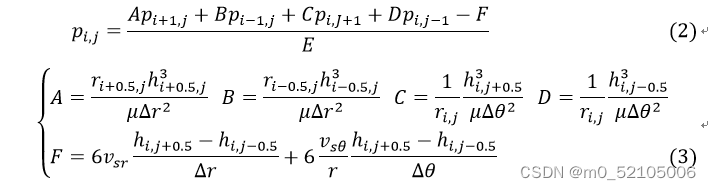
通过中心油膜厚度来计算油膜的厚度场为:

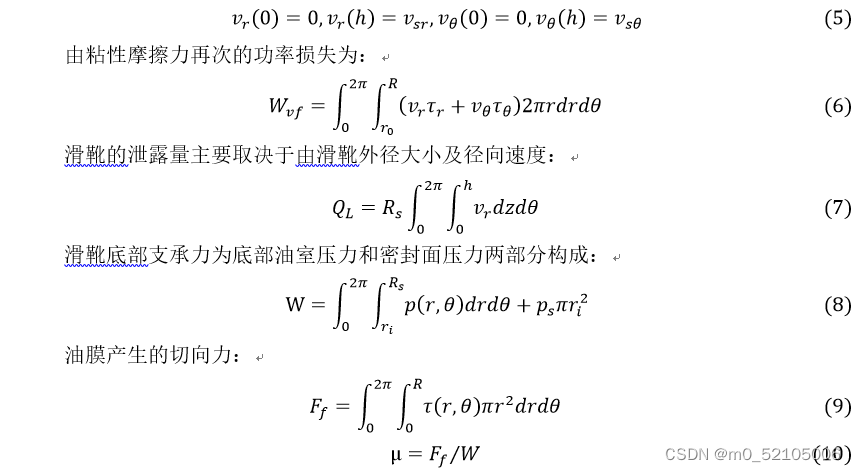
边界条件设置:设置滑靴油室到密封面角接触处的压强设置为入口压力,滑靴外径处与外界的交界面设置为出口压力。这里的入口压力设置为35Mpa,出口压力为0.2Mpa。将网格划分为20×50。径向m=20,周向n=50。根据粘性流体流动的特性,设置密封面处油膜顶部的速度为初速度,最底部的速度为0,即:
 采用超松弛迭代法进行求解,求解的方法是对线性方程组进行迭代求解,迭代收敛的依据为:
采用超松弛迭代法进行求解,求解的方法是对线性方程组进行迭代求解,迭代收敛的依据为:

通过如下mtlab代码实现:
%%%%利用松弛迭代法求解差分方程如下。
%清除命令窗口及工作区变量
clc
clear
%定义网格数量,a表示径向,b表示周向;
a=20;b=50;
%定义主要参数,ww为缸体转速,hc表示中心油膜厚度,hc=10um,miu表示动力粘度;
dR=1/a;dT=1/b;ww=4000;hc=10*10^-6;miu=0.041;
%定义微分区间的大小,并设置边界条件为入口35Mpa,出口1MPa;
dertaR=2/a*10^-3;dertaT=1/b*2*pi; ps=3.5*10^7;pc=2*10^5;
%滑靴外径4mm,内径2mm,滑靴倾角0.00075rad,任意角度滑靴油膜厚度为c;
Rs=4*10^-3;Ri=2*10^-3;alpha=0.00075;c=hc+Rs*tan(alpha);
%计算滑靴的径向速度ur和周向速度uc;
ur=ww*2*pi/50*9.5*10^-3*cos(12/180*pi);uc=ww*2*pi/50*9.5*10^-3*sin(12/180*pi);
%定义边界节点的压力为0,这是为了方便计算;t矩阵为了后边方便储存数据;
p(a,b)=0;t=[];
%定义后面迭代的矩阵大小,由于迭代的需要,将矩阵两个方向的维度均增大1;
a1=a+1;b1=b+1;a2=a-1;b2=b-1;
A=zeros(a1,b1);B=zeros(a1,b1);C=zeros(a1,b1);D=zeros(a1,b1);
E=zeros(a1,b1);F=zeros(a1,b1);G=zeros(a1,b1);
%定义边界节点的压力为0.2Mpa,这是为了方便计算;
p(a1,b1)=200000;
%计算滑靴油室的压力,
ld1=8e-4;l1=5.4e-3;
ld2=6e-4;l2=2.1e-3;
q1=1.53e-8; %柱塞排量,
p2=ps-(q1*128*miu*l1)/(pi*(ld1)^4)-(q1*128*miu*l2)/(pi*(ld2)^4)t1=clock;
%设置入口压强为35Mpa,出口压强为0.2Mpa;
for j=1:b1p(a1,j)=pc;
end
for j=1:b1 %定义底边的边界条件压力为0p(1,j)=ps;
end%以下循环语句是根据雷诺方程变化成差分形式,对差分式各项系数矩阵ABCDEF进行求解;
for j=2:bj1=j-1;j2=j+1;j11=2*(j-1)-1;j12=2*j-1;for i=2:ai1=i-1;i2=i+1;i11=2*(i-1)-1;i12=2*i-1;T=dT*j*2*pi;R=2*10^-3+dertaR*i;H=hc-R*tan(alpha)*cos(T);HHH(i,j)=hc-R*tan(alpha)*cos(T);dhdr=-tan(alpha)*cos(T);dhdt=R*tan(alpha)*sin(T);dhdr1(i,j)=dhdr;dhdt1(i,j)=dhdt;if j==50&&i==20 %边界条件使得接口处的偏导数相同dhdt1(:,50)=dhdt1(:,1);endT1=dT/2*j11*2*pi;T2=dT/2*j12*2*pi;R1=2*10^-3+dertaR/2*10^-3*i11;H1=hc-R1*tan(alpha)*cos(T);R2=2*10^-3+dertaR/2*10^-3*i12;H2=hc-R2*tan(alpha)*cos(T);H3=hc-R*tan(alpha)*cos(T2);H4=hc-R*tan(alpha)*cos(T1);if j==50&&i==20 %边界条件使得接口处的偏导数相同dhdt1(:,50)=dhdt1(:,1);endA(i,j)=R2*H2^3/(miu*dertaR^2);B(i,j)=R1*H1^3/(miu*dertaR^2);C(i,j)=H3^3/(R*miu*dertaT^2);D(i,j)=H4^3/(R*miu*dertaT^2);E(i,j)=A(i,j)+B(i,j)+C(i,j)+D(i,j);F(i,j)=6*miu*ur*dhdr1(i,j)+6*miu*uc*dhdt1(i,j);end
end
HHH=HHH(2:a,2:b);%设置初始误差和迭代数为1;error=1;N=1;
%设置循环语句,当满足精度条件error<=1e-10时结束循环;
%采用线性方程组的迭代求法对差分方程进行求解,并将结果放在p矩阵中while error>=1*10^-6p1=p;for j=2:bj1=j-1;j2=j+1;for i=2:ai1=i-1;i2=i+1;p(i,j)=(A(i,j)*p(i2,j)+B(i,j)*p(i1,j)+C(i,j)*p(i,j2)+D(i,j)*p(i,j1)-F(i,j))/E(i,j);endendHE=mean(p1(:));HG=mean(p(:));error=abs((HE-HG)/HG);N=N+1;end
%对迭代得到的矩阵进行处理(去掉周向上为0的边界条件)方便得到较好的数据和图像;
pr=p;
prr=pr;
prr(:,1)=pr(:,2);
prr(:,b1)=pr(:,a1);
p1=p(1:a,2:b);%下面根据已有的压强场求解速度场分布
H=hc-R*tan(alpha)*cos(T);
Hm=hc-R*tan(alpha)*cos(pi);
Hm=hc;
for j=2:bjj1=j-1;jj2=j+1;for i=2:aii1=i-1;ii2=i+1;R=2*10^-3+dertaR*i;c=a;dertaz=hc/a;HH=linspace(0,hc,20);ha=15;dpdr(i,j)=(prr(ii1,j)-prr(ii2,j))/(2*dertaR);dpdt(i,j)=(prr(i,jj2)-prr(i,jj1))/(2*dertaT);vr(i,j)=-1/(2*miu)*dpdr(i,j)*(HH(ha)^2-HH(ha)*Hm)+ur*HH(ha)/Hm;vt(i,j)=-1/(2*miu)*dpdt(i,j)*(HH(ha)^2-HH(ha)*Hm)+uc*HH(ha)/Hm;vreal(i,j)=sqrt(vr(i,j)^2+vt(i,j)^2);taor(i,j)=dpdr(i,j)*Hm/2+miu*ur/Hm;taot(i,j)=dpdt(i,j)*Hm/(2*R)+miu*uc/Hm;tao(i,j)=sqrt(taor(i,j)^2+taot(i,j)^2);fs1(i,j)=(vr(i,j)*taor(i,j)+vt(i,j)*taot(i,j))*2*pi*R*dertaR*dertaT;ws2(i,j)=vr(i,j)*Rs*dertaz;end
end
fs1;
fsz=sum(fs1(:));for j=2:bHm=hc;jj3=j-1;jj4=j+1;for i=2:aii3=i-1;ii4=i+1;R=2*10^-3+dertaR*i;dertaz=hc/c;HH=linspace(0,hc,c);%设定滑靴速度变化主要由径向变化导致,周向上设置不变;dpdr(i,j)=(prr(ii3,j)-prr(ii4,j))/(2*dertaR);
%用t矩阵储存计算得到的速度矩阵vreal;
t=[];k=1;
%计算滑靴底部的速度场vrr;
while k<=cfor j=2:bfor i=2:avr(i,j)=-1/(2*miu)*dpdr(i,j)*(HH(k)^2-HH(k)*Hm)+ur*HH(k)/Hm;vt(i,j)=-1/(2*miu)*dpdt(i,j)*(HH(k)^2-HH(k)*Hm)+uc*HH(k)/Hm;%计算粘性摩擦功损失fs1以及滑靴外径处的泄漏量ws2;vreal(i,j)=sqrt(vr(i,j)^2+vt(i,j)^2); endendt=[t,vreal];k=k+1;
endfor k=1:aLL=(k-1)*b+1;LS=k*b;vrr(k,:)=t(a,LL:LS); %这部分的目的在于获得不同厚度下的速度;endend
end%去掉第一行第一列的0项得到较贴切的速度矩阵;
vrr1=vrr(2:a,2:b)/5;dertaT1=1/b*2*pi;dertaH=hc/(c-1);Q=vrr1*dertaT1*dertaH;Q1=sum(Q(:));Q2=Q1*60/1000; %计算泄漏量wxL=Q2*(ps-pc); %泄露能量损失fsz; %粘性摩擦功损失wt=wxL+fsz; %总的能量损失taoavge=sum(tao(2:a,2:b));paverage=sum(pr(2:a,2:b));taoavge1=sum(taoavge(:))/(a2*b2); %切应力平均值paverage1=sum(paverage(:))/(a2*b2); %压强平均值miuu=taoavge1/paverage1; %摩擦系数Fmi=paverage1*pi*(Rs^2-Ri^2); %密封面支承力;Fz=Fmi+p2*pi*Ri^2; %总支承力;t2=clock;tzong=etime(t2,t1);e1=['迭代次数为:',num2str(N)];e2=['迭代精度为:',num2str(error)];e3=['程序计算时间为:',num2str(tzong)];e4=['输出的主要参数为:'];e5=['平均压强值为:',num2str(paverage1)];e6=['切应力平均值为:',num2str(taoavge1)];e7=['摩擦系数为:',num2str(miuu)];e8=['泄漏量为:',num2str(Q1)];e9=['泄漏量能量损失:',num2str(wxL)];e10=['粘性摩擦功为:',num2str(fsz)];e11=['总能量损失为:',num2str(wt)];e12=['密封面静压力为:',num2str(Fmi)];e13=['总静压力为:',num2str(Fz)];%显示主要输出参数disp(e1)disp(e2)disp(e3)disp(e4)disp(e5)disp(e6)disp(e7)disp(e8)disp(e9)disp(e10)disp(e11)disp(e12)disp(e13)%%%下面绘制主要图像
%绘制滑靴底部油膜厚度场
r1=linspace(0.2,0.4,a2);
t1=linspace(0,2*pi,b2);
x1=zeros(a2,b2);
y1=zeros(a2,b2);
for i=1:a2x1(i,:)=r1(i)*cos(t1);y1(i,:)=r1(i)*sin(t1);
end
figure(1)
HHH=HHH*1e6;%将厚度单位转化为um;
pt1=surf(x1,y1,HHH);%绘制滑靴底部的厚度场图
set(pt1,'edgecolor','none') %如果网格数量太多可加上,方便查看结果;
title('滑靴底部油膜厚度场','FontSize',15,'FontWeight','bold','Color','r')
xlabel('r/mm','FontSize',15,'FontWeight','bold')
ylabel('r/mm','FontSize',15,'FontWeight','bold')
zlabel('h/um','FontSize',15,'FontWeight','bold')
colorbar
colormap("jet")
view(-90,90)%绘制滑靴底部压力场
r1=linspace(0.2,0.4,a);
t1=linspace(0,2*pi,b2);
x1=zeros(a,b2);
y1=zeros(a,b2);
% p1=p(1:a,2:b);
for i=1:ax1(i,:)=r1(i)*cos(t1);y1(i,:)=r1(i)*sin(t1);
end
figure(2)
pt2=surf(x1,y1,p1);%绘制滑靴底部的压力场
set(pt2,'edgecolor','none')
title('滑靴底部油膜压力场','FontSize',15,'FontWeight','bold','Color','r')
xlabel('r/mm','FontSize',15,'FontWeight','bold')
ylabel('r/mm','FontSize',15,'FontWeight','bold')
zlabel('压强/pa','FontSize',15,'FontWeight','bold')
colorbar
colormap("jet")
view(-40,40)%绘制滑靴底部剪切压力场
r2=linspace(0.2,0.4,a2);
t2=linspace(0,2*pi,b2);
x2=zeros(a2,b2);
y2=zeros(a2,b2);
tao1=tao(2:a,2:b);
for i=1:a2x2(i,:)=r2(i)*cos(t2);y2(i,:)=r2(i)*sin(t2);
end
figure(3)
pt3=surf(x2,y2,tao1);%绘制滑靴底部的剪切压强场图
set(pt3,'edgecolor','none')
title('滑靴底部剪切压强场','FontSize',15,'FontWeight','bold','Color','r')
xlabel('r/mm','FontSize',15,'FontWeight','bold')
ylabel('r/mm','FontSize',15,'FontWeight','bold')
zlabel('压强/pa','FontSize',15,'FontWeight','bold')
colorbar
colormap("jet")
view(-40,40)%绘制滑靴底部速度场
r3=linspace(0,10,a2);
t3=linspace(0,360,b2);
x3=zeros(a2,b2);
y3=zeros(a2,b2);
for i=1:a2y3(i,:)=t3;
end
for j=1:b2x3(:,j)=r3;
end
figure(4)
pt4=surf(x3,y3,vrr1);%绘制滑靴底部的速度场图
set(pt4,'edgecolor','none')
title('滑靴底部速度场','FontSize',15,'FontWeight','bold','Color','r')
xlabel('h/um','FontSize',15,'FontWeight','bold')
ylabel('度','FontSize',15,'FontWeight','bold')
zlabel('速度m/s','FontSize',15,'FontWeight','bold')
colorbar
colormap("jet")
view(-40,40)
输出结果:
迭代次数为:422
迭代精度为:9.7821e-07
程序计算时间为:0.432
输出的主要参数为:
平均压强值为:17413903.2105
切应力平均值为:107590.4704
摩擦系数为:0.0061784
泄漏量为:0.00037913
泄漏量能量损失:791.6251
粘性摩擦功为:190.2184
总能量损失为:981.8435
密封面静压力为:656.4887
总静压力为:1096.3022




这篇关于通过雷诺方程运用matlab求解滑靴底部油膜厚度场、压力场、剪切场及速度场的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








