本文主要是介绍u-blox 6 GPS模块(一),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 硬件描述
1.2 结构

图1 u-blox 6 模块结构
由两个功能部分组成:射频(RF)和基带(Baseband)部分。
RF前端包括输入匹配元件、SAW(声表面波)带通滤波器、u-blox 6 RF-IC(带集成的LNA)和频率源。
基带部分,包括u-blox 6基带处理器、RTC晶体振荡器和附加的元件如:用于扩展编程和灵活性的可选FLASH内存
1.3 电源管理
1.3.1 电源连接
u-blox6接收器有三个电源脚:VCC、V_BCKP和VDDUSB。
l VCC:主电源
主电源接到VCC脚。在运行期间,u-blox 6 GPS模块的消耗的电流变化非常大,特别是节电模式的时候。系统电源应该能提供短时的峰值电流。当从备份模式切换到正常模式或者启动时u-blox6模块先给内核域的内部电容充电,这时会产生一个很大的电流,对于低功耗的应用,使用节电或备份模式,电源或在模块输入的低ESR电容担负着这个充电电流。
l V_BCKP:备份电源
在VCC失去的时候,实时时钟和备份RAM的供电通过V_BCKP脚。这个备份电源使得u_blox6接收器能够以若启动或温启动方式(取决于VCC掉电的时间长度)从掉电中恢复过来, 可以保持配置信息存储在备份RAM中不丢失。如果无备份电池连接,接收器上电的时候会执行冷启动。
如果无备份电池,V_BCKP脚应该连接到GND。
只要VCC维持对u-blox6接收器的供电,备份电池就不会为RTC和备份RAM供电,这样可以节省电池消耗,见图2。此时RTC和BBR的供电来自于VCC脚。
应当避免在V_BCKP脚上的高阻:在从主电源切换到备份电源期间,一个短时电流峰值能在这个脚上引起较大的电压降,这可能会出现问题。
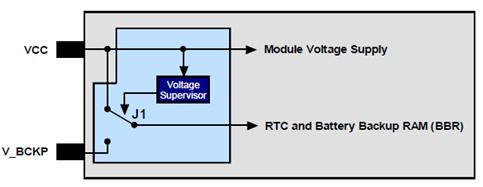
图2备份电池和电压
l VDD_USB:USB接口电源
在LEA-6和NEO-6中,VDD_USB电源提供给USB接口,如果不使用USB接口,VDD_USB脚必须连接到GND。更详细的信息参考1.6.2.1节的内容。
1.3.2 工作模式
有两个连续运行模式(最大性能模式和ECO模式)和一个间歇运行模式(节电模式)。最大性能模式自由使用捕获引擎,导致最好的可能的TTFF(Time To First Fix),然而Eco模式优化捕获引擎的使用以降低电流消耗。在中等和强信号时,这些模式的捕获跟踪性能几乎没什么不同。
l 最大性能模式:在最大性能模式,u-blox6接收器以全部性能使用捕获引擎来搜索可能的卫星,直到星历完全下载下来。结果,在下面的时候,会达到跟踪的当前功耗:
n 一个有效的GPS位置是固定的
n 星历完全被下载下来
n 可看到的所有卫星的星图是有效的。
l Eco模式:在Eco模式下,仅在需要导航的时候,u-blox 6接收器使用捕获引擎搜索新的卫星:
n 在冷启动时,u-blox 6搜索足够的卫星,用来导航和优化捕获引擎的使用以便下载它们的星图。
n 在非冷启动时,u-blox6着重于搜索可用的卫星,这些卫星的轨道按星历是已知的。
在Eco模式,u-blox6捕获引擎限制它的搜索资源的使用,以减少功耗,结果是发现最微弱信号的那些卫星的时间可能相对于最大性能模式稍微长一些。
u-blox6只要定位固定,就会撤销捕获引擎,足够数目(至少4个)的卫星正被跟踪,跟踪引擎联系搜索和跟踪新的没有任何轨道信息的卫星。
l 节电模式:u-blox 6接收器包括节电模式。它以周期跟踪方式运行,从而达到显著降低平均功耗的目的。节电模式能被配置成不同的更新周期,为了最佳的GPS性能,u-blox推荐更新周期是1s,更多的信息见u-blox6的通讯协议中关于接收器的描述。
航位推测(Dead Reckoning)、PPP和精确定时特征不应该在节电模式下使用。
1.4 天线电源:V_ANT(LEA-6)
LEA-6模块支持有源天线,监视电路使用V_ANT脚为有源天线供电,在V_ANT前使用一个10欧姆的电阻。更详细的信息见2.6节。
如果不使用这个脚,
这篇关于u-blox 6 GPS模块(一)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




