本文主要是介绍3D制图教程:GeoScene Pro+Blender,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
内容导读
最近使用GeoScene Pro和Blender进行了3D制图,觉得挺有意思的,故把一些制作过程和心得做个总结。
制作过程需要使用到的软件是Geoscene Pro(ArcGIS Pro亦可)以及Blender,GeoScene Pro是GIS软件,和ArcGIS Pro的操作习惯和步骤基本一致;Blender大家可能比较陌生,这是一款开源免费的三维制作软件,可以制作各种三维模型和动画。下面先看一下制作的效果,再讲一下制作的基本原理,最后是核心的操作步骤。
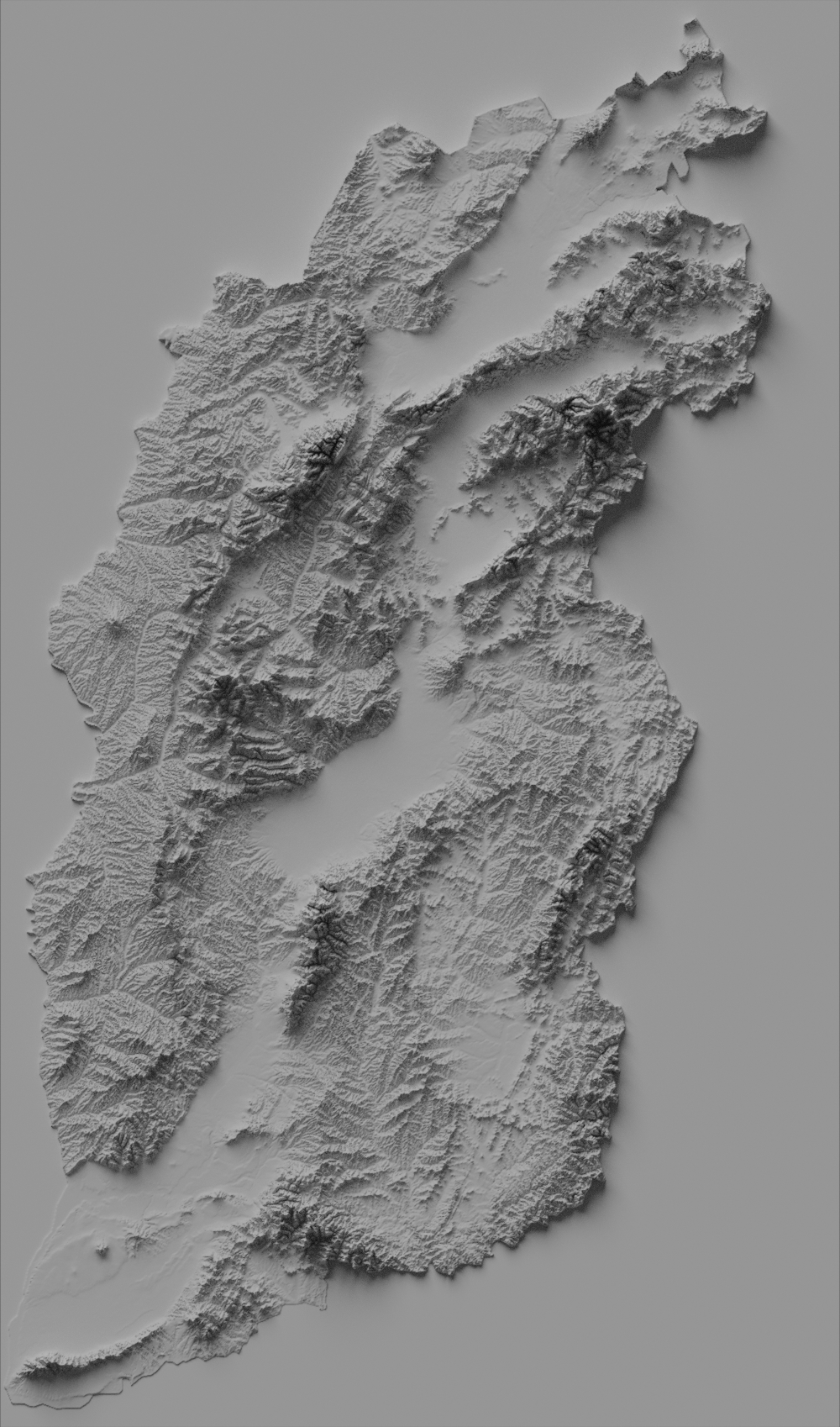
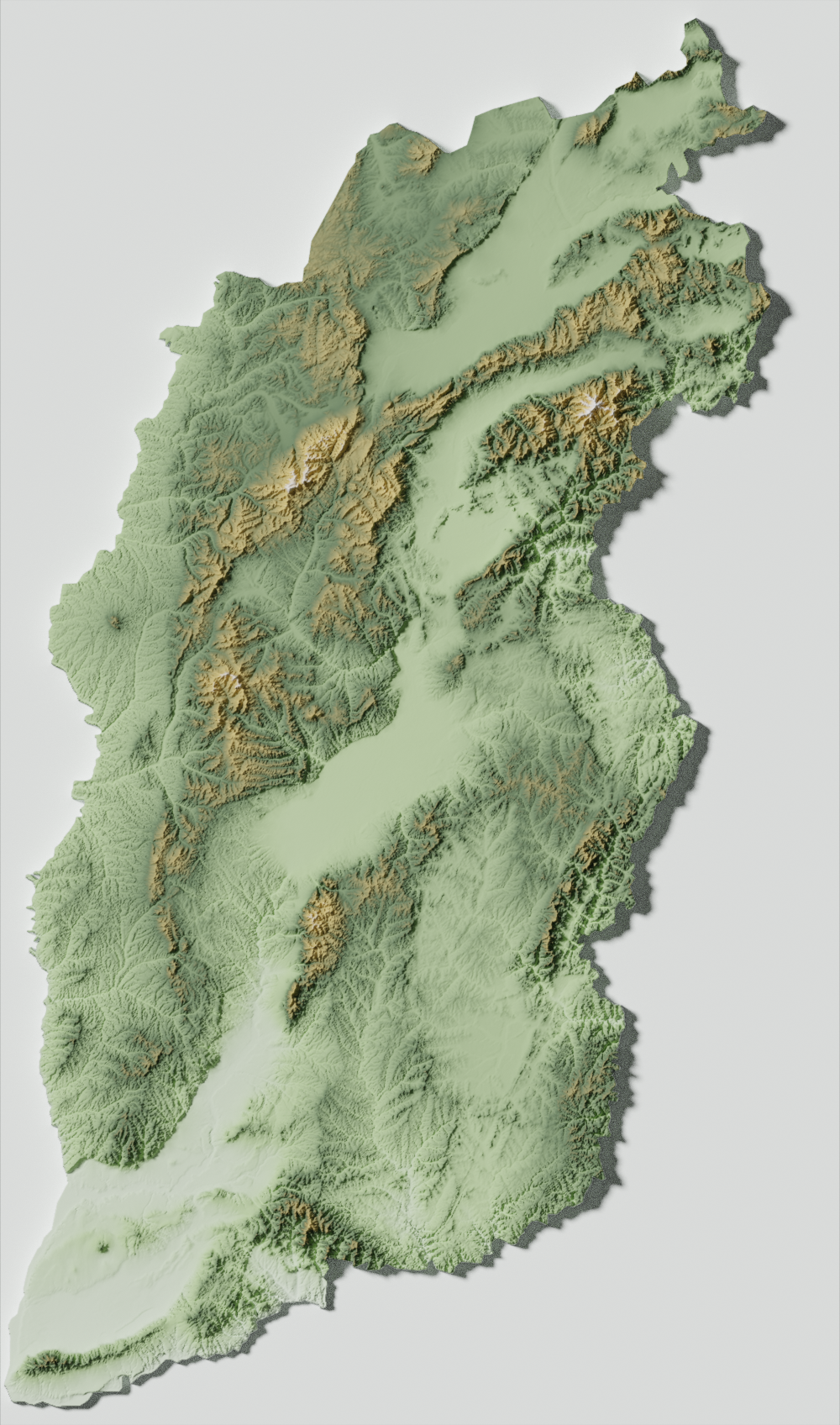
01制图效果
以下四张效果图,前两张是不添加彩色色带,后两张是使用了色带。每一组两张,分别是采用了不同的光线强度的效果。

02制作原理
首先需要有一个栅格数据来表示高度,可以是DEM也可以是其他栅格数据,这代表了你制作的3D地图高度的意义;栅格数据的处理要用到GIS软件,我使用了G
这篇关于3D制图教程:GeoScene Pro+Blender的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









