本文主要是介绍基于Kinect视觉系统的西红柿自动识别与定位,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
论文重点笔记
- 1、基于图像分割的西红柿识别
- 颜色空间的选择
- 采用RGB颜色空间进行分割缺点
- 不能完全去除背景噪声,三个分量高度相关,而且分割结果受光照的影响较大。
- RGB线性变换
- YIQ、 YUV、 I1I2I3
- 优点:计算量小, 并 且部分消除了RGB的相关性
- RGB非线性变换
- HSI、 Lab、 Luv、 NRGB
- 选取:HSI和Lab颜色空间分别分割, 然后将两个分割结果进行融合, 再对分割结果去除背景噪声。
- 采用RGB颜色空间进行分割缺点
- HSI 颜色特征分析与提取
- HSI颜色特征分析
- 颜色空间转换公式

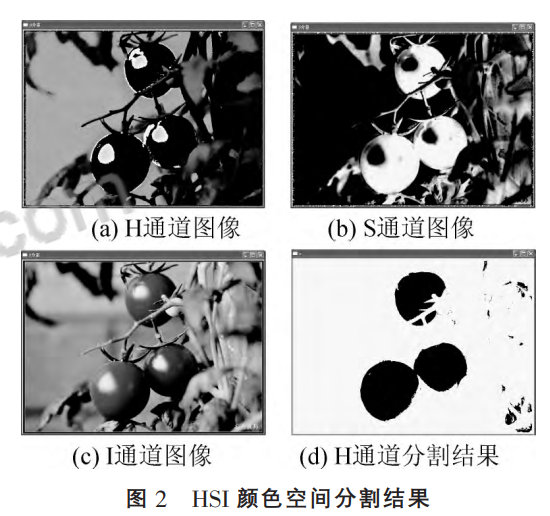
- H代表色调;S代表饱和度;I代表亮度或透明度。在HSI颜色空间中H、S、I的3个分量相互独立,可分别对这3个量进行控制。西红柿表面光滑,在光照变化的情况下影响图像的提取,所以处理时只考虑H分量,这样就避免了光照的影响,具体做法是采用基于门限改进的Otsu法(阈值分割)完成对H分量的图像分割。
- 颜色空间转换公式
- Otsu分割方法的改进
- 结合迭代法和Otsu法,根据图像先确定一个初始阈值T1,然后利用Otsu法自动获取最佳阈值T,将获得的两个阈值进行比较,如果T1≥T, 则最佳阈值为T,如果T1≤T,则最佳阈值为T1。
- 分割结果
-
- HSI颜色特征分析
- Lab 色彩空间图像分割
- 颜色空间转换公式
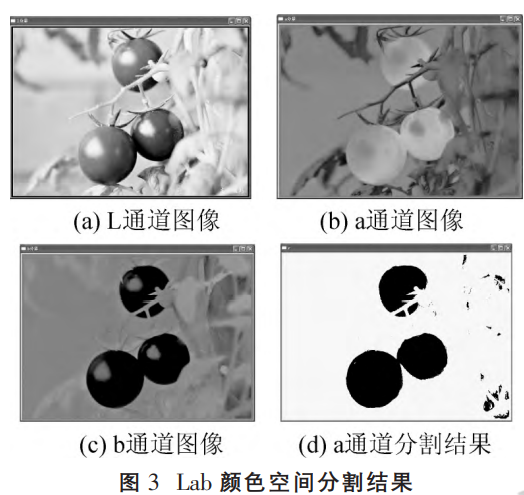
- Lab色彩空间是根据色度和亮度组成的3维空间图,其中L表示心理明度,a、b为心理色度。在Lab色彩空间坐标中,+a表示红色,-a表示绿色,+b表示黄色,-b 表示蓝色,颜色的明度由L的百分数来表示。通过西红柿的颜色特征, 我们很明显得出成熟的西红柿为+a (红色), 未成熟的西红柿及枝干和叶子为-a (绿色)。因此选择Lab色彩空间来对成熟西红柿进行分割是非常合适的。
- 将图像的L通道、a通道、b通道的图像分离出来,得到3个独立的灰度图像。由于a通道两端所代表的颜色是成熟西红柿的红色和背景颜色绿色,所以只需对a通道的图像进行处理从而完成对成熟西红柿的分割。基于灰度图像的分割方法很多,采用K均值聚类算法。
- 分割结果
-
- 颜色空间转换公式
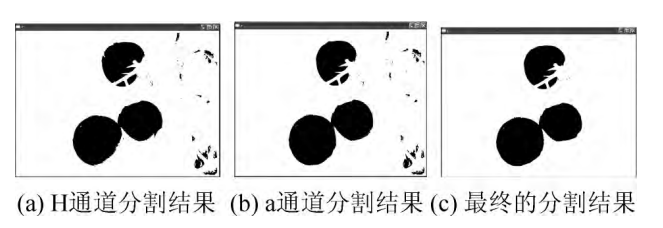
- HSI 与 Lab 颜色空间分割结果的融合
- 图像融合方法
- 方法:颜色过渡法、 小波融合法和多分辨率样条法等
- 优缺点:这些算法的效果较好, 但计算量较大
- 加权平均算法(本文)
- 算法思想:图像重叠区域中像素点的灰度值P由两幅图像中对应点的灰度值PH和Pa加权平均得到。
- 去噪
- 对于联通区域较小的背景噪声采取形态学运算的 方法去除;
- 对于连通区域面积较大的背景噪声采取设定阈值进行面积判断。
- 结果
-
- 图像融合方法
- 复杂情况研究讨论
- 被枝叶遮挡,只能采集到西红柿的一部分图像————广 义Hough变换的方法
- 两颗西红柿连在一起————基于边界跟踪的分割算法
- 颜色空间的选择
- 2、基于 Kinect 的视觉定位
- Kinect 简介
- 实现机器人对西红柿的自动采摘, 关键是获得西红柿准确的空间位置, 以便为控制机械手动作提供参数。
- 包含RGB彩色摄像头、红外发射器、红外线传感器。RGB彩色摄像头用于彩色图像的摄取,深度图像信息采用的是主动获取方式,红外发射器发射红外线,红外传感器对反射回来的红外线进行接收,通过对反射信息的处理,就能获得每个像素的深度值。
- 三维重建与目标定位
- 利用Kinect获得RGB彩色信息和深度信息;
- 对彩色图像进行分割,在分割结果中对联通区域分析,确定西红柿的数量及每个西红柿对应的像素点二维坐标;
- 根据公式,得到每个西红柿质心的二维坐标;
- 根据Kinect得到的深度图像中对应像素点的深度值, 利用OpenCV的reprojectimageTo3D函数,计算出每个西红柿质心的三维坐标。
- Kinect 简介
- 3、结论
- 对西红柿自动识别问题进行了分析, 提出了根据颜色分通道, 融合HSI和Lab的分割结果完成对西红柿的识别,对现场采集的50组样本图像进行实验,能够从各种复杂的背景中将西红柿分割出来,轮廓清晰图像饱满。
- 用 Kinect 代替双目摄像头,对深度图像进行三维重建,得到目标西红柿质心的空间坐标值完成定位,搭建实验平台对模型中的西红柿目标进行定位试验,试验结果表明该方法定位稳定,准确度高。
- 本文提出的识别和定位方法不仅仅适用于西红柿, 对方法稍加修改可用于对草莓、 樱桃等红色蔬菜或水果的自动识别。
这篇关于基于Kinect视觉系统的西红柿自动识别与定位的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






