本文主要是介绍线性代数学习笔记(二):线性变换的理解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
线性代数学习笔记(二):线性变换的理解
文章目录
- 线性代数学习笔记(二):线性变换的理解
- 一、基变换与坐标变换
- 二、 线性变换
- 2.1 线性变换与基变换的不同
- 2.2 线性变换的表示
- 2.3 线性变换的分类
- 2.4 线性变换与矩阵
- 2.5 应用:线性代数观点看线性变换
- 2.5.1 微分方程是线性变换
- 2.5.2 傅里叶变换是基底变换
- 2.5.3 相似矩阵
- 三、线性空间的理解
- 四、矩阵的理解
一、基变换与坐标变换
一个n维的线性空间V,可以有多组基底。
假设存在两组基底:老基底 = ( e ⃗ 1 , e ⃗ 2 , . . . , e ⃗ n ) =(\vec e_1,\vec e_2,...,\vec e_n) =(e1,e2,...,en);
新基底 = ( e ⃗ 1 ′ , e ⃗ 2 ′ , . . . , e ⃗ n ′ ) =(\vec e'_1,\vec e'_2,...,\vec e'_n) =(e1′,e2′,...,en′)。
对于线性空间中一个元素 α ⃗ \vec \alpha α可以被表示,如下图示: 也即元素 α ⃗ \vec \alpha α=
也即元素 α ⃗ \vec \alpha α=
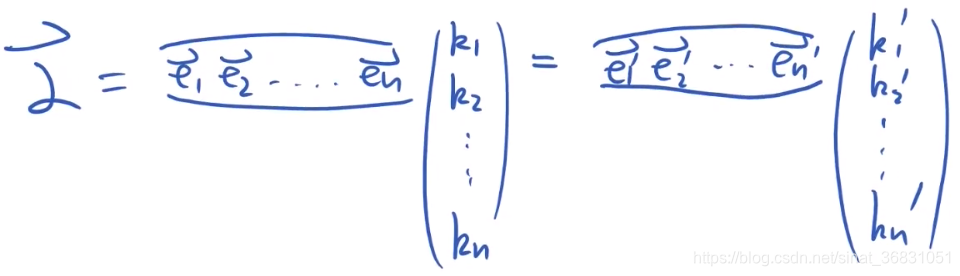
我们知道对于新基底中每个元素 e ⃗ k \vec e_k ek,其都属于线性空间V中的某一个普通元素,所以可以用老基底展开表示出来,如下图:
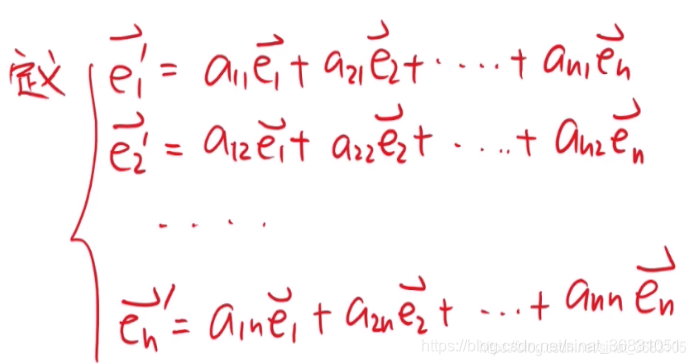
将系数抽象出来,用矩阵表示-矩阵T:
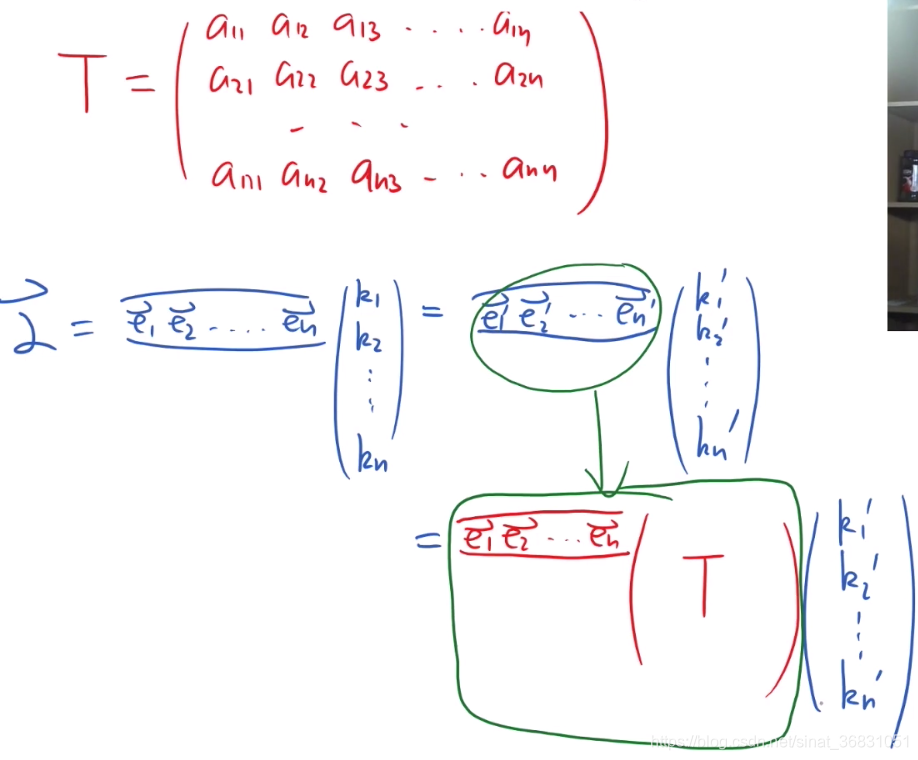
观察可得:
基变换: ( e ⃗ 1 ′ , e ⃗ 2 ′ , . . . , e ⃗ n ′ ) = ( e ⃗ 1 , e ⃗ 2 , . . . , e ⃗ n ) T (\vec e'_1,\vec e'_2,...,\vec e'_n)=(\vec e_1,\vec e_2,...,\vec e_n)T (e1′,e2′,...,en′)=(e1,e2,...,en)T
系数变换: ( k ⃗ 1 , k ⃗ 2 , . . . , k ⃗ n ) = ( k ⃗ 1 ′ , k ⃗ 2 ′ , . . . , k ⃗ n ′ ) T (\vec k_1,\vec k_2,...,\vec k_n)=(\vec k'_1,\vec k'_2,...,\vec k'_n)T (k1,k2,...,kn)=(k1′,k2′,...,kn′)T
其中,T 被称作过渡矩阵。
(不区分基底变换矩阵和系数变换矩阵,同是矩阵T[好巧(´∀`)])。
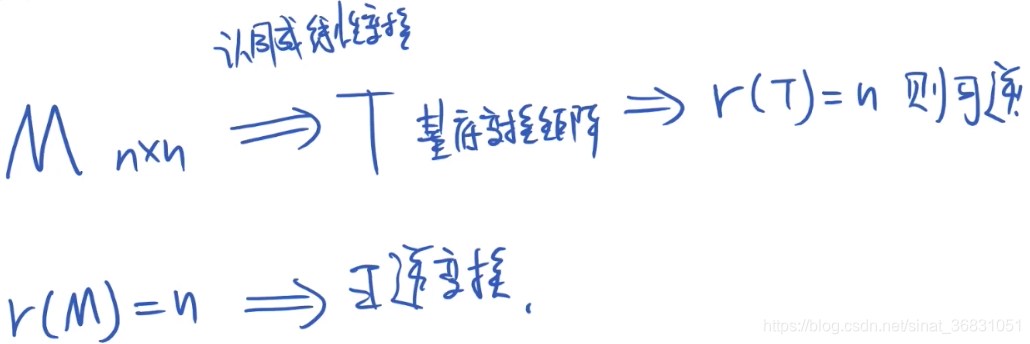
 那么再来想,如果 ( e ⃗ 1 ′ , e ⃗ 2 ′ , . . . , e ⃗ n ′ ) (\vec e'_1,\vec e'_2,...,\vec e'_n) (e1′,e2′,...,en′)可以作为线性空间V的一组新基底。那它肯定需要满足:线性无关性。
那么再来想,如果 ( e ⃗ 1 ′ , e ⃗ 2 ′ , . . . , e ⃗ n ′ ) (\vec e'_1,\vec e'_2,...,\vec e'_n) (e1′,e2′,...,en′)可以作为线性空间V的一组新基底。那它肯定需要满足:线性无关性。
根据基底变换公式:新基底=老基底*T。
得:新基底的线性无关性与转换矩阵T有关。
—— T是满秩矩阵。
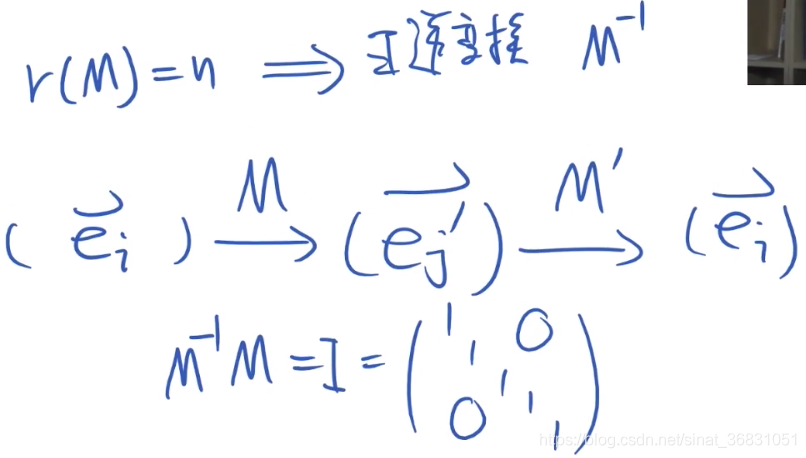
基底变换矩阵可以由老基底变到新基底,同样也一定能由新基底再变回来。那么就引出了 “矩阵的逆”-“逆矩阵” 的概念。
如下图所示:
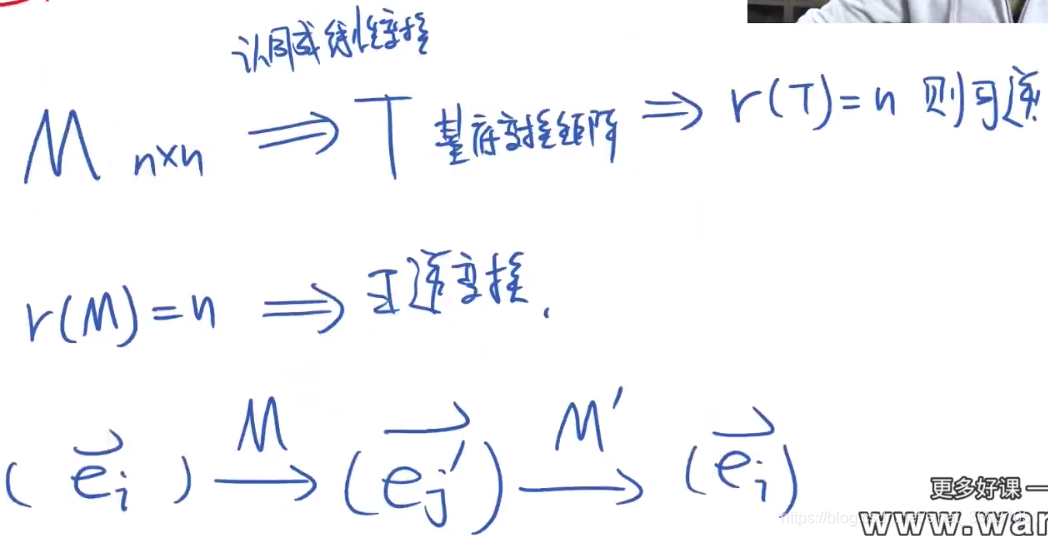
 可以得到结论:
可以得到结论:
r a n k ( T ) = n rank(T)=n rank(T)=n ;
矩阵T是方阵,同时是可逆矩阵。
二、 线性变换
2.1 线性变换与基变换的不同
2.1中为引入“基变换”和“坐标变换”的概念,从线性空间拎出任一向量 α ⃗ \vec \alpha α,并对这一个向量的“微观”表示下文章,加以解释概念。
向量不变,基底变。
 而我们要从线性空间中取出的向量也不总是一成不变的,向量与向量间如何转换?
而我们要从线性空间中取出的向量也不总是一成不变的,向量与向量间如何转换?
向量变,且变换后的向量仍保持线性性。
线性变换:
L ( k α ⃗ + l β ⃗ ) = k ∗ L ( α ⃗ ) + l ∗ L ( β ⃗ ) L(k\vec \alpha+l\vec \beta)=k*L(\vec \alpha)+l*L(\vec \beta) L(kα+lβ)=k∗L(α)+l∗L(β)
常见的线性变换:投影、旋转、反演、各类复合。
 投影: α ⃗ \vec \alpha α与 β ⃗ \vec \beta β的和在平面上的投影等于 α ⃗ \vec \alpha α与 β ⃗ \vec \beta β分别投影之和。
投影: α ⃗ \vec \alpha α与 β ⃗ \vec \beta β的和在平面上的投影等于 α ⃗ \vec \alpha α与 β ⃗ \vec \beta β分别投影之和。
2.2 线性变换的表示
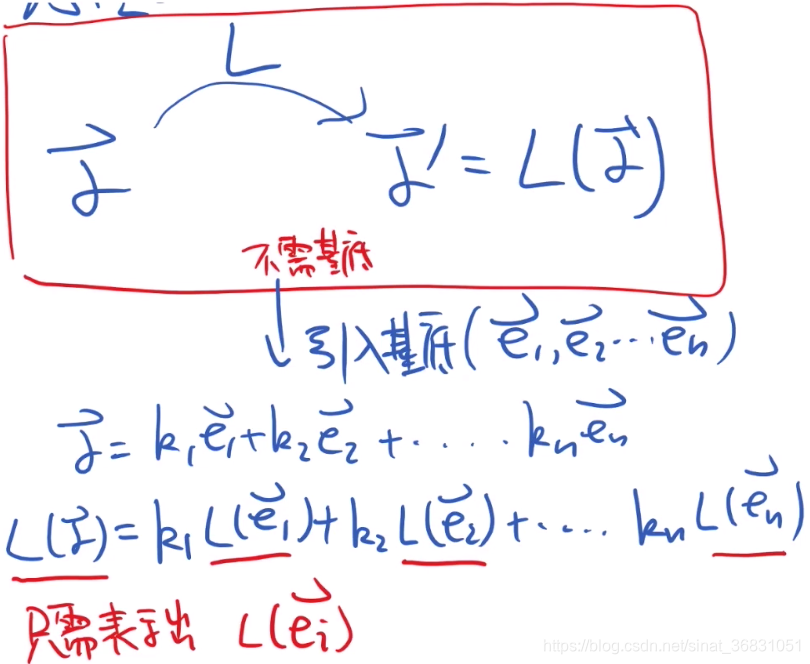
线性变换本身是不需要基底的,但是我们常常需要引入基底来帮助计算和形象化的表示这种变换。
- Why?
想象一个二维空间中的向量 α ⃗ \vec \alpha α:对其做线性变换(伸缩或旋转、改变方向或大小)时,本就是针对这个向量本身完成的这些操作。但是为了具象的描述这个过程,引入基底以精准的用数学语言描述:
已知二维空间的基底为 x ⃗ 和 y ⃗ \vec x和\vec y x和y, α ⃗ \vec \alpha α可以分别投影到x轴和y轴上,自然的定义一种数学描述 α ⃗ = k x ⃗ + l y ⃗ \vec \alpha=k\vec x+l\vec y α=kx+ly。
当对 α ⃗ \vec \alpha α做整体线性变换 L ( α ⃗ ) L(\vec \alpha) L(α)时, L ( α ⃗ ) = L ( k x ⃗ + l y ⃗ ) L(\vec \alpha)=L(k\vec x+l\vec y) L(α)=L(kx+ly),这个操作就相当于对每个基底(分量)先进行线性变换然后求和得到 L ( α ⃗ ) L(\vec \alpha) L(α): L ( k x ⃗ + l y ⃗ ) = k ( L x ⃗ ) + l ( L y ⃗ ) L(k\vec x+l\vec y)=k(L\vec x)+l(L\vec y) L(kx+ly)=k(Lx)+l(Ly)。
要想求 α ⃗ \vec \alpha α线性变换后的向量,先求出各个基底的线性变换后乘系数加和。
线性空间中引入基底来描述线性变换的过程:
e ⃗ = ( e ⃗ 1 , e ⃗ 2 , . . . , e ⃗ n ) \vec e=(\vec e_1,\vec e_2,...,\vec e_n) e=(e1,e2,...,en)
α ⃗ = k 1 e ⃗ 1 + k 2 e ⃗ 2 + . . . + k n e ⃗ n \vec \alpha=k_1\vec e_1+k_2\vec e_2+...+k_n\vec e_n α=k1e1+k2e2+...+knen
L ( α ⃗ ) = k 1 ∗ L ( e ⃗ 1 ) + k 2 ∗ L ( e ⃗ 2 ) + . . . + k n ∗ L ( e ⃗ n ) L(\vec \alpha)=k_1*L(\vec e_1)+k_2*L(\vec e_2)+...+k_n*L(\vec e_n) L(α)=k1∗L(e1)+k2∗L(e2)+...+kn∗L(en)
研究 L ( α ⃗ ) L(\vec \alpha) L(α)的问题转化成研究各个基底的线性变换。
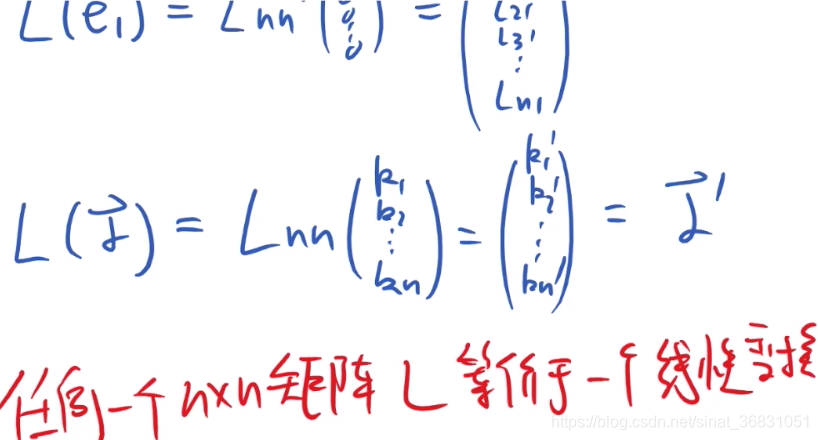
观察每个基底的变化: e ⃗ i → L ( e ⃗ i ) \vec e_i \to L(\vec e_i) ei→L(ei)
每个基底也可以被原线性空间的一组基底表示(只不过其他维度系数都为0)
L ( e ⃗ i ) L(\vec e_i) L(ei)相当于对 e ⃗ i \vec e_i ei 这个基向量的 每个基底做线性变换。即每个分量乘上对应变换系数。
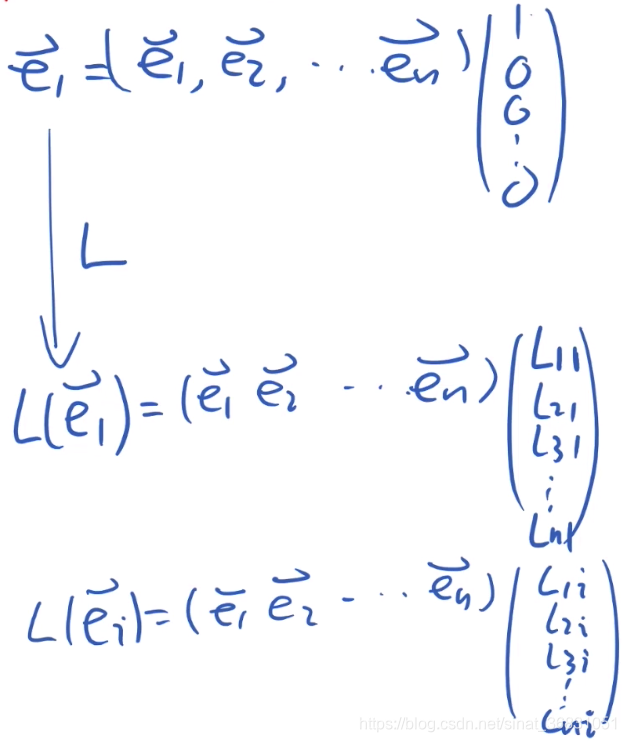
最终表示出对于这个向量而言,整体的线性变换—— 将线性变换L描述成一个矩阵 L n ∗ n L_{n*n} Ln∗n。
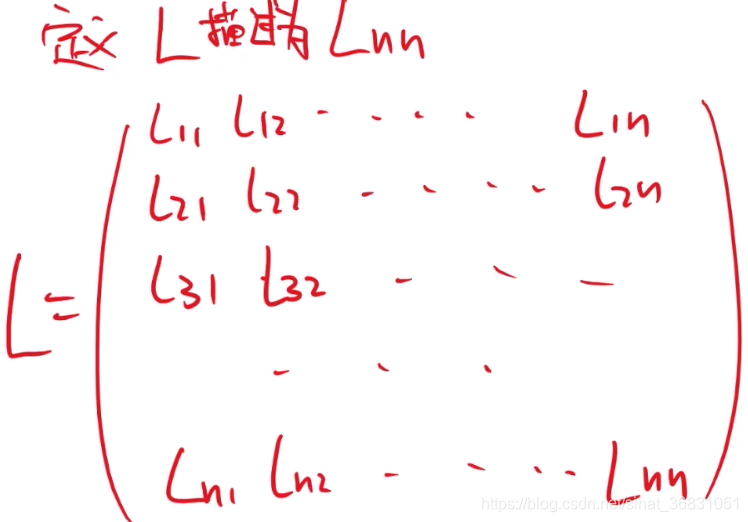
线性变换作用在一个向量上,就相当于作用在这个向量对应的每个基底上。
任何一个n*n的矩阵L,等价于一个线性变换。
2.3 线性变换的分类
线性变换根据是否可逆,分成可逆线性变换和不可逆线性变换。
可逆线性变换:旋转、反演等。
不可逆线性变换:投影。
2.4 线性变换与矩阵
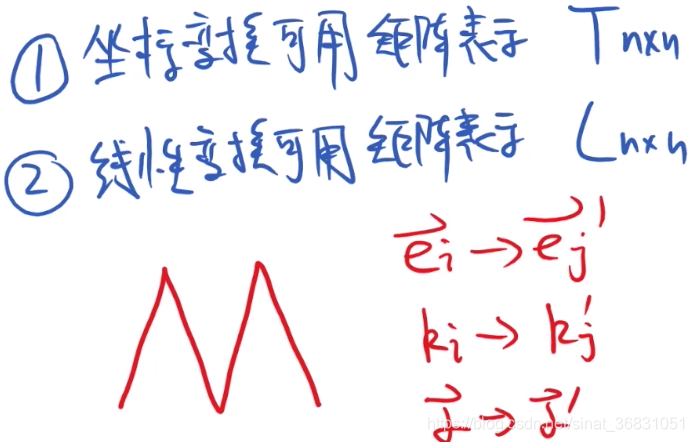
在学习线性空间和线性变换的过程中,我们总不可避免的去接触矩阵这个东西——
a) 描述坐标变换 e ⃗ i → e ⃗ i ′ \vec e_i \to \vec e_i' ei→ei′,用到矩阵 T n ∗ n T_{n*n} Tn∗n;
b) 描述向量用不同基底展开时的系数变化 k i → k i ′ k_i \to k_i' ki→ki′,用到矩阵 T n ∗ n T_{n*n} Tn∗n;
c) 描述线性变换 α ⃗ → α ⃗ ′ \vec \alpha \to \vec \alpha' α→α′,用到矩阵 L n ∗ n L_{n*n} Ln∗n。
那矩阵到底是什么?到底用来描述什么东西?
想象一个自然数,我们可以把它认为是多少钱、多少道题、多少本书、多少天等。
当给定了使用场景/衡量标准时,它有不同的意义。
只有给定了使用场景/衡量标准时,它才有意义。
矩阵也是这样。
对于矩阵的理解要结合具体场景,从宏观体系上理解。眼光不能总是聚焦在矩阵中的一串数字上。
2.5 应用:线性代数观点看线性变换
用线性代数求解函数空间中的线性微分方程
在这里要引出对相似矩阵的概念理解
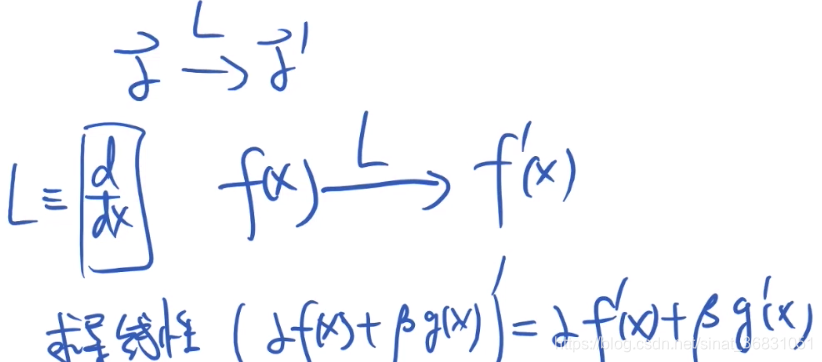
2.5.1 微分方程是线性变换
2.5.2 傅里叶变换是基底变换
傅里叶变换的思想:
如果直接求解微分方程不会做,先把 f ( x ) f(x) f(x)经过傅里叶变换(基底变换)成 g ( k ) g(k) g(k),再对 g ( k ) g(k) g(k)求解。
问题简化成“解多项式方程”。
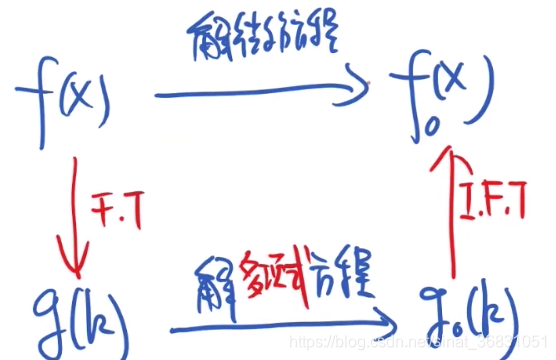
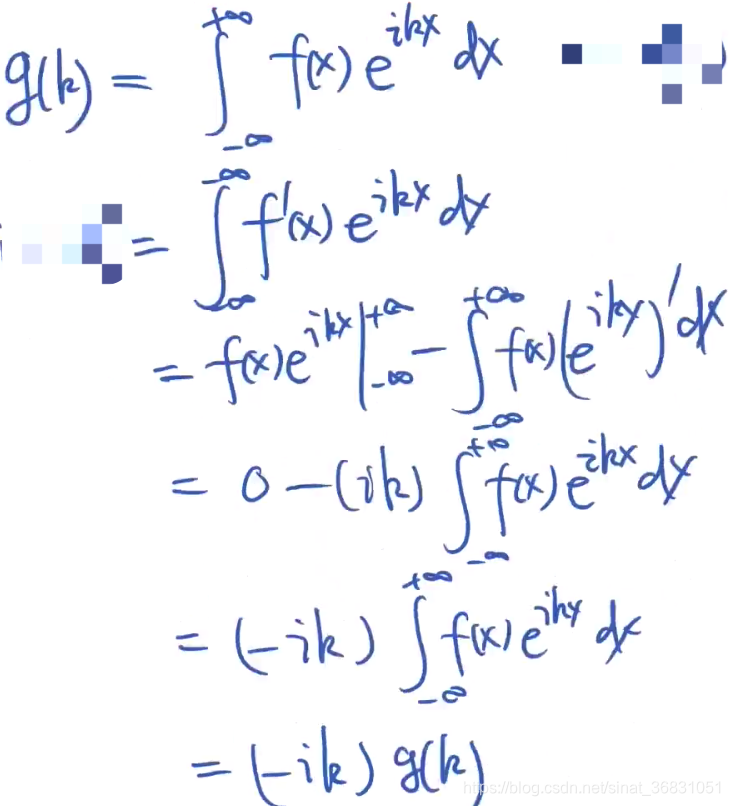
时域空间中 f ( x ) f(x) f(x)与频域空间中 g ( k ) g(k) g(k)的关系:

为什么要将 f ( x ) f(x) f(x)转成 g ( k ) g(k) g(k)计算?
g ′ ( k ) = ( − i k ) g ( x ) g'(k)=(-ik)g(x) g′(k)=(−ik)g(x),发现:我们依然可以用g(k)来表示g(k)的导数。这样就可以将微分方程 → \to →多项式方程,解起来简单多了。
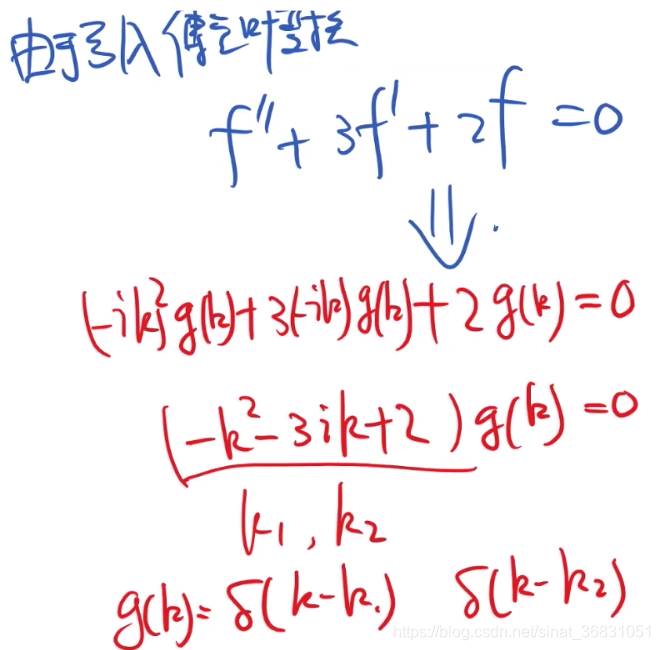
-eg:
求解线性微分方程 f ′ ′ + 3 f ′ + 2 f = 0 f''+3f'+2f=0 f′′+3f′+2f=0。
2.5.3 相似矩阵
依据前面利用傅里叶变换求解问题的思想:
拿到一个问题,正面直接求解我们不会做。
但若存在一种转换方法,将原问题转化成另外一个问题,又能将问题再转换回原问题。并且这种转换方法往往使得计算更简单。
在这个变换过程中,注意T必须是可逆的。
- 根据这种思想,得到相似矩阵的概念:
若 A = T − 1 B T A=T^{-1}BT A=T−1BT,则称A相似于B。

单对数学表达式进行观察,我们似乎很容易得到:“一个矩阵B 与 对其右乘矩阵T再左乘矩阵T的逆矩阵得到的矩阵A相似”这种表面上的定义方式,但更应该清楚这到底是怎么得来的,以及为什么要有这种定义和操作。
三、线性空间的理解
详见:
线性代数学习笔记(一):线性空间的理解
四、矩阵的理解
详见:
线性代数学习笔记(三):矩阵的理解之— 矩阵的秩与行列式
线性代数学习笔记(四):矩阵的理解之— 矩阵的特征值与特征向量
线性代数学习笔记(五):矩阵的理解之— 线性代数核心定理
这篇关于线性代数学习笔记(二):线性变换的理解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






