本文主要是介绍PointRend,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
论文题目:PointRend: Image Segmentation as Rendering
论文链接:https://arxiv.org/pdf/1912.08193.pdf
代码地址:https://github.com/zsef123/PointRend-PyTorch
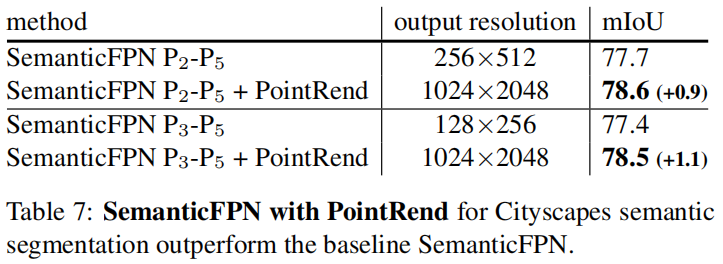
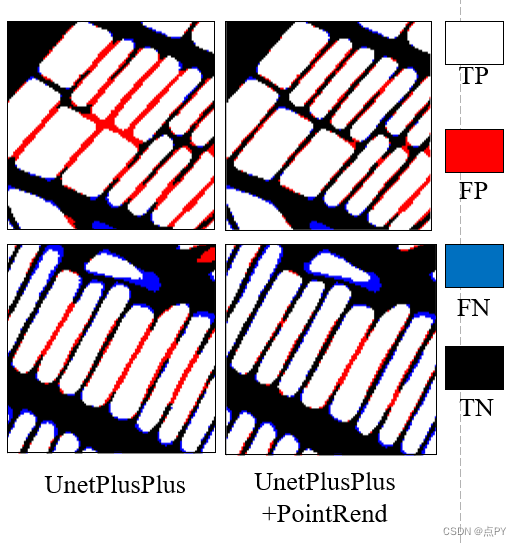
语义分割问题。提出一个新型上采样方法,针对物体边缘的图像分割进行优化,使其在难以分割的物体边缘部分有更好的表现。
问题提出
我们分割网络会存在一个问题,对平滑区域过采样,对边界欠采样。
类比渲染问题,二者有类似的问题要解决:即物体边缘难以处理。高频区域多采样、低频区域少采样
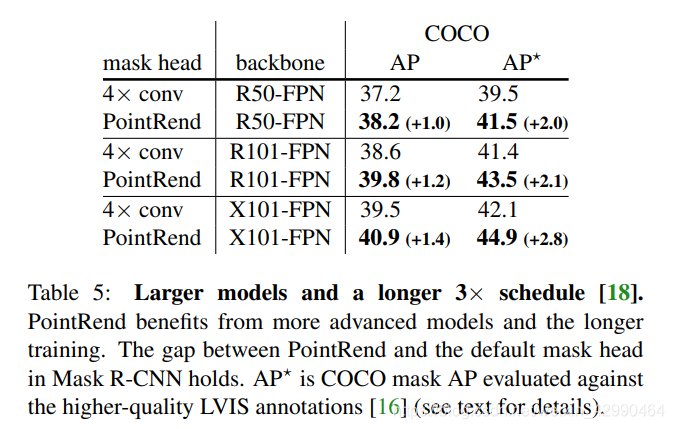
在典型的语义分割网络中(如FCN、DeepLab),在CNN内部一般都会相对输入图像进行降采样,然后再想办法上采样回去。实例分割网络中,Mask R-CNN 生成的 Mask 仅 28x28,这显然对物体边缘的预测十分不利。希望可以在低代价下仍然得到精细的分割结果。
大致思路
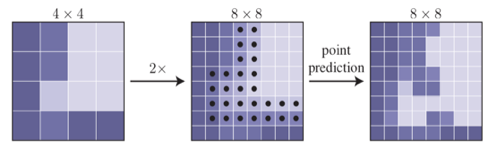
模型最容易误判的 pixel基本上都在物体边缘, 边缘只占了整个物体中非常小的一部分。
所以基于这样的一个想法,作者提出可以每次在预测出来的mask中只选择Top N最不确定的位置进行细分预测。
具体实现
PointR
这篇关于PointRend的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!