本文主要是介绍K_A14_004 基于STM32等单片机驱动旋转角度传感器模块 串口与OLED0.96双显示,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
K_A14_004 基于STM32等单片机驱动旋转角度传感器模块 串口与OLED0.96双显示
- 一、资源说明
- 二、基本参数
- 参数
- 引脚说明
- 三、驱动说明
- IIC地址/采集通道选择/时序
- 对应程序:
- 四、部分代码说明
- 1、接线引脚定义
- 1.1、STC89C52RC+旋转角度传感器模块
- 1.2、STM32F103C8T6+旋转角度传感器模块
- 五、基础知识学习与相关资料下载
- 六、视频效果展示与程序资料获取
- 七、注意事项
- 八、接线说明
- STC89C52RC
- STM32F103C8T6

一、资源说明
| 单片机型号 | 测试条件 | 模块名称 | 代码功能 |
|---|---|---|---|
| STC89C52RC | 晶振11.0592M | 旋转角度传感器模块 | STC89C52RC采集旋转角度传感器参数 串口与OLED0.96双显示 |
| STM32F103C8T6 | 晶振8M/系统时钟72M | 旋转角度传感器模块 | STM32F103C8T6采集旋转角度传感器参数 串口与OLED0.96双显示 |
其他资料目录 直戳跳转
二、基本参数
参数
供电电压:DC 5V
工作环境温度:-40°℃~85℃
旋转寿命:300K次
旋转扭矩:1mN. m(Ref. :10.5gf.cm)
有效旋转角度:333.3°
线性度:±2%
电位器总电阻阻值:10KQ ±30%
引脚说明
| 旋转角度传感器模块 | 引脚说明 |
|---|---|
| VCC | 正极 3.3-5V供电 |
| GND | 负极 接GND |
| OUT | 模拟量输出 |
三、驱动说明
STC89C52RC无ADC所以需要借助外部ADC模块 此处用PCF8591模块进行采集
IIC地址/采集通道选择/时序


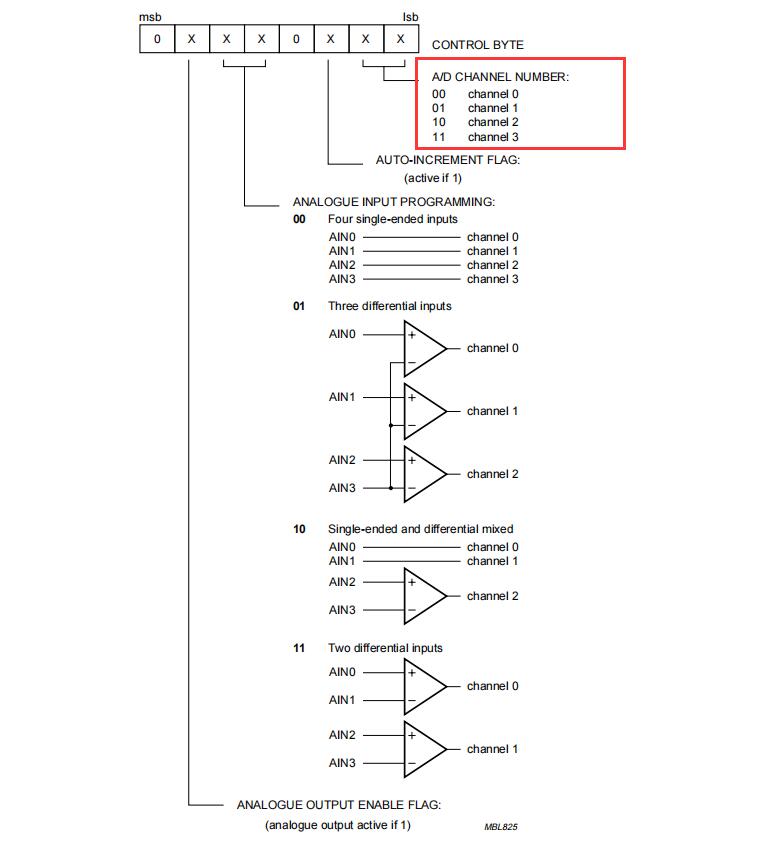
对应程序:
以51为例
/*******************************************************************起动总线函数
函数原型: void Start_I2c();
功能: 启动I2C总线,即发送I2C起始条件.
********************************************************************/
void Start_I2c()
{PCF8591_SDA=1; /*发送起始条件的数据信号*/PCF8591_SCL=1;IIC_Delay();PCF8591_SDA=0; /*发送起始信号*/IIC_Delay(); PCF8591_SCL=0; /*钳住I2C总线,准备发送或接收数据 */IIC_Delay();
}/*******************************************************************结束总线函数
函数原型: void Stop_I2c();
功能: 结束I2C总线,即发送I2C结束条件.
********************************************************************/
void Stop_I2c()
{PCF8591_SDA=0; /*发送结束条件的数据信号*/PCF8591_SCL=1; /*结束条件建立时间大于4μs*/IIC_Delay();PCF8591_SDA=1; /*发送I2C总线结束信号*/IIC_Delay();
}/*******************************************************************字节数据发送函数
函数原型: void SendByte(UCHAR c);
功能: 将数据c发送出去,可以是地址,也可以是数据,发完后等待应答,并对此状态位进行操作.(不应答或非应答都使ack=0) 发送数据正常,ack=1; ack=0表示被控器无应答或损坏。
********************************************************************/
void SendByte(uint8_t c)
{uint8_t BitCnt;for(BitCnt=0;BitCnt<8;BitCnt++) /*要传送的数据长度为8位*/{if((c<<BitCnt)&0x80)PCF8591_SDA=1; /*判断发送位*/else PCF8591_SDA=0; PCF8591_SCL=1; /*置时钟线为高,通知被控器开始接收数据位*/IIC_Delay(); PCF8591_SCL=0; }IIC_Delay();PCF8591_SDA=1; /*8位发送完后释放数据线,准备接收应答位*/IIC_Delay(); PCF8591_SCL=1;IIC_Delay();if(PCF8591_SDA==1)ack=0; else ack=1; /*判断是否接收到应答信号*/PCF8591_SCL=0;IIC_Delay();
}/*******************************************************************字节数据接收函数
函数原型: UCHAR RcvByte();
功能: 用来接收从器件传来的数据,并判断总线错误(不发应答信号),发完后请用应答函数应答从机。
********************************************************************/
uint8_t RcvByte()
{uint8_t retc;uint8_t BitCnt;retc=0; PCF8591_SDA=1; /*置数据线为输入方式*/for(BitCnt=0;BitCnt<8;BitCnt++){PCF8591_SCL=0; /*置时钟线为低,准备接收数据位*/IIC_Delay();PCF8591_SCL=1; /*置时钟线为高使数据线上数据有效*/IIC_Delay();retc=retc<<1;if(PCF8591_SDA==1)retc=retc+1; /*读数据位,接收的数据位放入retc中 */IIC_Delay();}PCF8591_SCL=0; IIC_Delay();return(retc);
}/********************************************************************应答子函数
函数原型: void Ack_I2c(bit a);
功能: 主控器进行应答信号(可以是应答或非应答信号,由位参数a决定)
********************************************************************/
void Ack_I2c(uint8_t a)
{if(a==0)PCF8591_SDA=0; /*在此发出应答或非应答信号 */else PCF8591_SDA=1;IIC_Delay(); PCF8591_SCL=1;IIC_Delay();PCF8591_SCL=0; /*清时钟线,钳住I2C总线以便继续接收*/IIC_Delay();
}采集通道选择:
ISendByte(PCF8591,0x42);地址:
#define PCF8591 0x90 //PCF8591 地址四、部分代码说明
1、接线引脚定义
需要自定义引脚可在此处更改,STM32要自定义引脚的话也要注意引脚时钟使能的更改
1.1、STC89C52RC+旋转角度传感器模块
//旋转角度传感器+PCF8591模块引脚定义
旋转角度传感器模块---------------------PCF8591
OUT------------------------------------AIN2sbit PCF8591_SCL=P1^0; //I2C 时钟
sbit PCF8591_SDA=P1^1; //I2C 数据
//OLED0.96模块引脚定义
sbit SCL=P1^2; //串行时钟
sbit SDA=P1^3; //串行数据
1.2、STM32F103C8T6+旋转角度传感器模块
//旋转角度传感器模块引脚定义 GPIOA_0 ADC1通道0
#define ADC_GPIO_APBxClock_FUN RCC_APB2PeriphClockCmd
#define ADC_GPIO_CLK RCC_APB2Periph_GPIOA
#define ADC_PORT GPIOA
#define ADC_PIN GPIO_Pin_0
//OLED0.96模块引脚定义 //-----------------OLED IIC端口定义---------------- #define OLED_SCLK_Clr() GPIO_ResetBits(GPIOB,GPIO_Pin_8)//SCL
#define OLED_SCLK_Set() GPIO_SetBits(GPIOB,GPIO_Pin_8)#define OLED_SDIN_Clr() GPIO_ResetBits(GPIOB,GPIO_Pin_9)//SDA
#define OLED_SDIN_Set() GPIO_SetBits(GPIOB,GPIO_Pin_9)
五、基础知识学习与相关资料下载
1、STC89C52RC程序下载 直戳跳转
2、STM32F103C8T6程序下载
(1)串口下载 直戳跳转
(2)ST-LINK下载 直戳跳转
(3)J-LINK下载 直戳跳转
(4)DAP-LINK下载 直戳跳转
3、OLED0.96程序说明 直戳跳转
4、串口助手下载与使用
(1)安信可调试助手使用 直戳跳转
(2) sscom33串口调试助手使用 直戳跳转
(3)STC-ISP串口调试助手使用 直戳跳转
六、视频效果展示与程序资料获取
视频连接 直戳跳转
资料获取 ( 滑到最后添加群号看公告免费获取)
七、注意事项
1、VCC GND请勿接反,接反易烧
2、OLED显示异常时,排除接线接触不良
八、接线说明
STC89C52RC
/************************************************************************************
// 生成日期 : 2021-6-21
// 最近修改 : 2021-11-21
// 功能描述 : 旋转角度传感器模块测试程序
// 测试条件 : STC89C52RC 晶振11.0592
接线
旋转角度传感器模块-----------------------STC89C52RC
VCC------------------------------------5V
GND------------------------------------GND
旋转角度传感器模块-----------------------PCF8591
SIG-------------------------------------AIN2PCF8591--------------------------------STC89C52RC
VCC-- ---------------------------------5V
GND- ----------------------------------GND
SCL- ----------------------------------P1.0 //SCL
SDA- ----------------------------------P1.1 //SDAOLED0.96(IIC) -------------------------STC89C52RC
VCC------------------------------------3.3V
GND------------------------------------GND
SCL------------------------------------P1^2
SDA------------------------------------P1^3
*************************************************************************************/
STM32F103C8T6
/************************************************************************************
// 生成日期 : 2021-6-21
// 最近修改 : 2021-11-21
// 功能描述 : 旋转角度传感器模块测试程序
// 测试条件 : STM32F103C8T6 晶振8M 系统时钟 72M
接线
旋转角度传感器模块-----------------------STM32F103C8T6
VCC-------------------------------------3.3V
GND-------------------------------------GND
SIG--------------------------------------PA_0 OLED0.96
VCC-- -----------------------------------3.3V
GND- ------------------------------------GND
SCL- ------------------------------------PB_8 //SCL
SDA- ------------------------------------PB_9 //SDA
*****************************************************************************************/
这篇关于K_A14_004 基于STM32等单片机驱动旋转角度传感器模块 串口与OLED0.96双显示的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




