本文主要是介绍基于虹科双通道PCAN-miniPCIe接口卡的血管造影机C臂多轴运动控制系统【PCAN医疗应用系列1】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
【PCAN医疗应用系列1】
虹科将持续推出PCAN在医疗设备行业应用的系列解决方案,囊括生命科学仪器、CT医疗设备、集中控制系统等多个方面,精彩不容错过!
基于虹科双通道PCAN-miniPCIe接口卡的血管造影机C臂多轴运动控制系统
血管造影机是专门用于心脑血管疾病诊断和治疗的先进医疗设备,技术水平高,价格昂贵。为了同时实现血管造影机运动控制系统的开放式通信和分布控制,一般都是采用CAN总线来设计血管造影机C臂多轴运动控制系统,以解决以前老C臂线路繁多,实时性差等问题。

基于虹科双通道PCAN接口卡的血管造影机C臂多轴运动控制系统的总结结构框图如下所示。可以看到,该控制系统由上位机和下位机两部分组成,上位机通过双通道的PCAN-miniPCIe接口卡与下位机进行通信,下位机由多个节点组成,其中包括C臂伺服电机,L轴伺服电机,Junction伺服电机,I.I.伺服电机等。工控机实现数据处理,起停电机,碰撞检测等功能,完成总体监视与控制。伺服电机接收工控机的控制信号进行运动,并将自身的位置信息反馈给工控机,再由工控机对数据进行处理,作为控制的参考数据。
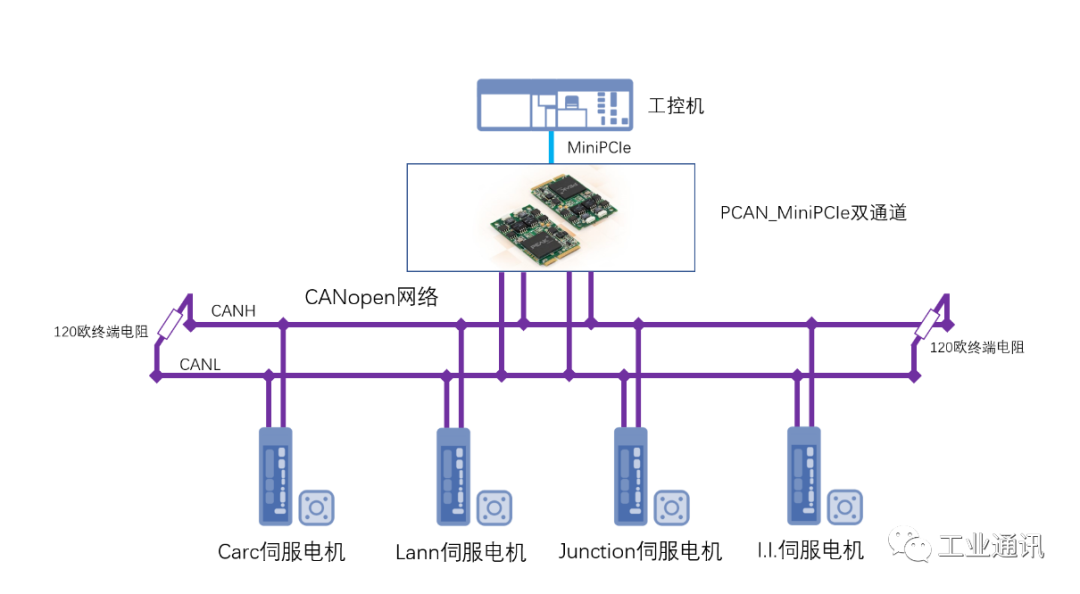
软件层面,采用CANopen作为应用层协议,通过NMT报文进行所有节点的通讯状态机控制,通过SDO通讯方式进行伺服电机的参数配置和运动模式切换,通过PDO通讯方式实时地进行主控(工控机)与各伺服电机之间的运动指令下达和位置信息反馈,再通过SYNC报文进行各伺服电机之间的执行同步。
方案特色
1:CAN/CANopen的实时性和稳定性
该方案采用虹科PCAN_miniPCIe硬件作为CAN接口,虹科CANopen协议栈作为应用层协议,CAN/CANopen报文可以实现点对点,单点对多点,多点对单点等通信,CAN总线采用非破坏性逐位仲裁技术解决总线冲突问题,保证了优先级高的数据无延迟,且CAN报文为短帧结构,有硬件CRC校验,受干扰的概率小,传输可靠性极高。而实时性和稳定性正好是医疗设备行业所要求和关注的。
2:PCAN miniPCIe的双通道设计
该方案中,工控机不仅要对所有伺服轴进行实时控制,还需要对整体CAN网络进行在线监控。为了更好地保证实时控制不受影响,该方案将实时控制部分与在线监控部分通过不同的CAN通道实现,且仅需一块PCAN miniPCIe接口卡即可。其中实时控制部分采用接口卡的CAN通道1,作为CAN网络的CANopen主控节点,可收可发,而在线监控部分采用接口卡的CAN通道2,作为第三方的单听监控节点,在线监听CAN网络数据及状态,不会对CAN网络产生任何外来干扰,也不占用CAN总线带宽。
虹科PCAN接口卡的关键特性

· 支持CAN,CAN FD,J1939,CANopen等多种物理层和应用层协议;
· 支持USB,PCI,PCIe,MiniPCIe,M.2,PC/104,PCI/104,cPCI等多种接口类型;
· 支持Windows,Linux等操作系统;
· 单通道,双通道,四通道,六通道等多种版本;
· 提供上位机软件及二次开发包;
· 时间戳分辨率 1 µ s(部分型号);
· 工作温度范围:-40 to 85°C
通过虹科双通道PCAN接口卡搭建血管造影机C臂多轴运动控制系统,实现简单,功能全面,安全可靠,实时稳定,满足了医疗设备行业对实时性和稳定性的要求。如您也想更进一步了解PCAN接口卡,请联系虹科获取产品资料和试用机会。
【作者:虹科工业通讯】4009993848
这篇关于基于虹科双通道PCAN-miniPCIe接口卡的血管造影机C臂多轴运动控制系统【PCAN医疗应用系列1】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






