本文主要是介绍【一种用opencv实现高斯曲线拟合的方法】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
背景:
项目中需要实现数据的高斯拟合,进而提取数据中标准差,手头只有opencv库,经过资料查找验证,总结该方法。
基础知识:
1、opencv中solve可以实现对矩阵参数的求解;
2、线的拟合就是对多项式参数求解的过程,多项式可表示为矩阵形式;
3、高斯公式中的指数幂,可以通过取对数的方式转变成多项式的形式;
求解思路:
高斯公式->多项式公式->矩阵参数->调用solve求解;
实现过程及代码
1、确定所选的高斯公式形式
G(x)=a*exp(-((x-b)/c)^2);
2、对于给定的输入x1 ~ xn,有对输出y1 ~ yn。可以形成如下等式:
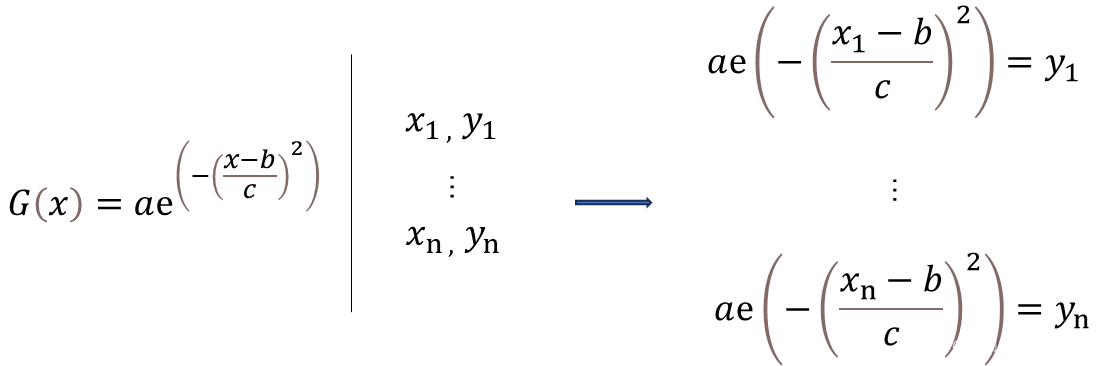
对等式左右两边取对数,并进行变换,可形成如下形式


这里,就形成了AX^2+BX+C=Y的形式,其中

用A,B,C替换后后,原等式可写作

此时,我们只需要计算出A,B,C的值,再通过ABC与abc的关系即可得到abc的值。(请读者自行推导abc的公式,或见代码部分)
得到如上的多项式的形式后,直接构造参数矩阵,调用cv::solve(X,Y,A‘)接口,即可得到参数矩阵A’,其中即含有A,B,C的值。
上代码:
基础定义:
typedef struct StructMultinomialParamt
{double dB0;//多项式拟合的参数,数字表示幂次double dB1;double dB2;
}S_MULTNMNL_PARAMT;
typedef struct StructGaussParamT
{double dA;//指定的高斯参数double dB;//中心点double dC;//标准差
}S_GAUS_PARAMT;
void Gauss(S_GAUS_PARAMT sGsParamm, cv::Mat mX, cv::Mat& mY)
{cv::Mat mRslt = Mat::zeros(mX.size(), mX.type());double dx = 0;for (double i = 0.; i < mX.cols; i++){for (double j = 0.; j < mX.rows; j++){dx = mX.at<double>(j, i);mRslt.at<double>(j, i) = sGsParamm.dA * exp(-(pow((dx - sGsParamm.dB) / sGsParamm.dC, 2)));}}mY = mRslt;return;
}
高斯参数求解函数
void GaussFitT(cv::Mat mX, cv::Mat mY, S_GAUS_PARAMT* psGsParamm)
{//step1 构造参数矩阵mx与mycv::Mat X = Mat::zeros(mX.rows, 3, CV_64FC1);for (size_t i = 0; i < mX.rows; i++){for (size_t J = 0; J < 3; J++){X.at<double>(i, J) = pow(mX.at<double>(i, 0), 2 - J);}}cv::log(mY, mY);//对结果取对数//step2 多项式拟合cv::Mat A;//参数矩阵cv::solve(X, mY, A, cv::DECOMP_SVD);S_MULTNMNL_PARAMT sBparam;sBparam.dB2 = A.at<double>(0);sBparam.dB1 = A.at<double>(1);sBparam.dB0 = A.at<double>(2);//step3 高斯参数计算ABC-》abcpsGsParamm->dA = exp(sBparam.dB0 - pow(sBparam.dB1, 2) / (4 * sBparam.dB2));psGsParamm->dB = -sBparam.dB1 / (2 * sBparam.dB2);psGsParamm->dC = sqrt(-1 / sBparam.dB2);return;
}
# 测试代码
double dX[50];//输入数据X
double dY[50];//输入数据Y
std::vector<cv::Point> pointsOri;for (int i = 0; i < 50; i++)
{dX[i] = double(i);dY[i] = -0.5 * pow((dX[i] - 25), 2) + 320 + i;pointsOri.push_back(cv::Point(dX[i], dY[i]));
}
//转换成求解函数输入需要的数据格式
cv::Mat mGsInputX = Mat::zeros(50, 1, CV_64FC1);
cv::Mat mGsInputY = Mat::zeros(50, 1, CV_64FC1);
for (size_t i = 0; i < 50; i++)
{mGsInputX.at<double>(i) = dX[i];mGsInputY.at<double>(i) = dY[i];
}S_GAUS_PARAMT sGsParamm;//求解结果
GaussFitT(mGsInputX, mGsInputY, &sGsParamm);//结果对比
Mat mGsOutputY;
Gauss(sGsParamm, mGsInputX, mGsOutputY);
std::vector<cv::Point> pointsNew;//拟合结果
for (int i = 0; i < 50; i++)
{pointsNew.push_back(cv::Point(dX[i], mGsOutputY.at<double>(i)));
}
cv::Mat img(450, 60, CV_8UC3, cv::Scalar(0, 0, 0));
cv::polylines(img, std::vector<std::vector<cv::Point>>{pointsOri}, false, cv::Scalar(0, 0, 255), 2);
cv::polylines(img, std::vector<std::vector<cv::Point>>{pointsNew}, false, cv::Scalar(255, 255, 255), 0.5);// 显示图像
cv::imshow("Line Chart", img);
cv::waitKey(0);
运行输出

红色的为原始数据分布,白色的为拟合计算结果。
而我需要的标准差,则为sGsParamm.dC。
参考:https://blog.csdn.net/guangjie2333/article/details/115629152
https://blog.csdn.net/KYJL888/article/details/103073956
https://blog.csdn.net/qq_35097289/article/details/103910984
后记:
调用solve的接口求解时,OPENCV提供了以下六种方式以对应不同的情况。对于多项式的求解,也可以采用最小二乘法的逼近,不再调用solve方法,这块后面再填坑吧。
cv::DECOMP_LU 高斯消元法(LU分解)
cv::DECOMP_SVD 奇异值分解(SVD)
cv::DECOMP_CHOLESKY 对于对称正定矩阵
cv::DECOMP_EIG 特征值分解,只用于对称矩阵
cv::DECOMP_QR QR因式分解
cv::DECOMP_NORMAL 可选附加标志,表示要求解标准方程
这篇关于【一种用opencv实现高斯曲线拟合的方法】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





