本文主要是介绍百度萝卜快跑正式“接单”——看AI如何带帝都子民奔向远方,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
人类对自动驾驶汽车的幻想从未停止,特别是近年来,多家科技公司和汽车行业的佼佼者都试图将这一想法付诸实践。上周,北京正式开放自动驾驶出行服务商业化试点,中国科技集团百度公司以及由丰田支持的自动驾驶初创公司小马智行( Pony.ai) 将在首都北京部署100 辆汽车,自动驾驶出租车将覆盖北京指定区域的600多个接送点,包括商业建筑以及住宅区,运营时间为早七点到晚十点。帝都的各位,坐稳了!
我们知道无人驾驶汽车主要依靠人工智能、传感器、定位系统和导航系统的协同合作。此次大规模全面开放一方面体现了我国无人驾驶技术进入成熟期。从另一方面也反映出当前最火的互联网技术是什么?那就是“ABC”,即人工智能、大数据、云计算技术。
那么汽车人工智能算法是如何用于自动驾驶汽车的呢?
为了让自动驾驶汽车能够做出决策,机器学习算法是根据现实生活中的数据集进行训练的。
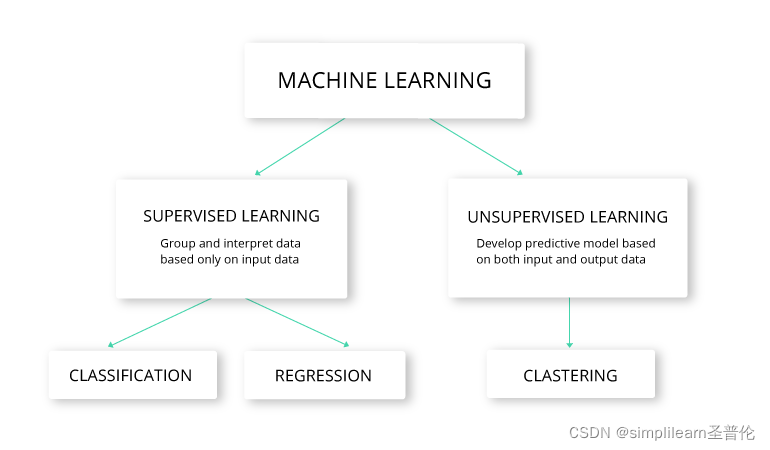
监督学习与无监督学习
机器学习有两种学习模型:有监督的和无监督的。在无监督学习中,机器学习算法接收没有被标记的数据并且没有接到关于如何处理它的指令,因此它必须自己弄清楚要做什么。
使用监督模型,向算法提供有关如何解释输入数据的指令。这是学习自动驾驶汽车的首选方法。它允许算法基于完全标记的数据集评估训练数据,使监督学习在涉及分类时更有用。
自动驾驶汽车使用的机器学习算法
SIFT(尺度不变特征变换)用于提取特征
SIFT 算法检测对象并解释图像。例如,对于三角形标志,标志的三个点作为特征输入。然后,汽车可以使用这些点轻松识别标志。

用于数据分类的 AdaBoost
该算法收集数据并对其进行分类,以提高车辆的学习过程和性能。它将不同的低性能分类器分组以获得单个高性能分类器,以便做出更好的决策。
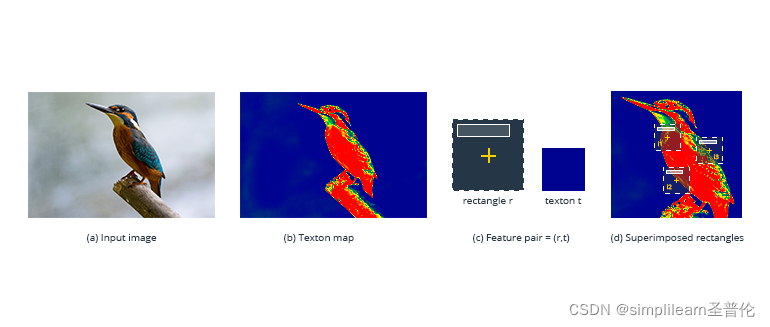
用于物体识别的 TextonBoost
TextonBoost 算法的工作与 AdaBoost 类似,只是它从形状、上下文和外观接收数据,以增加对文本(图像中的微结构)的学习。它聚合具有共同特征的视觉数据。
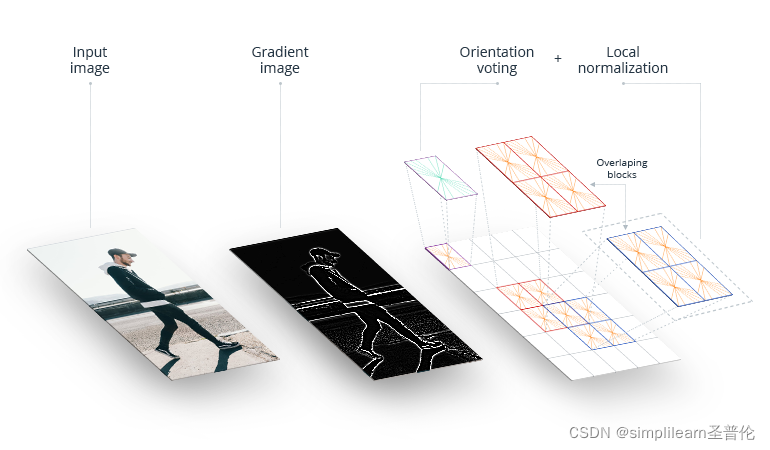
定向梯度直方图 (HOG)
HOG 有助于分析对象的位置(称为单元格),以找出对象如何变化或移动。
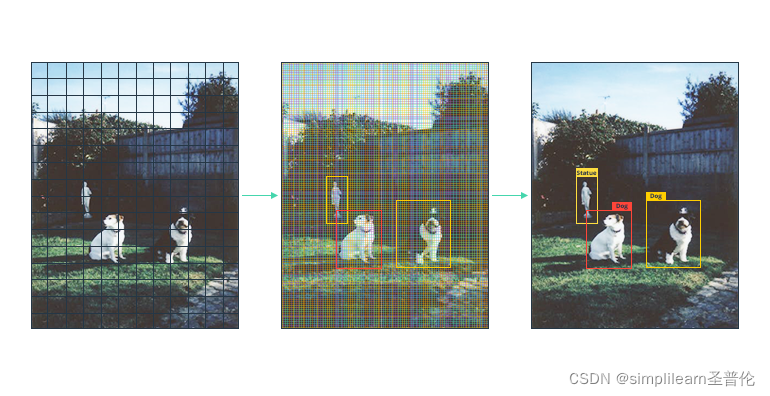
YOLO
该算法检测诸如人类、树木和车辆之类的对象并对其进行分组。然后对每一类分组对象分配特定的特征,以帮助汽车轻松地将它们识别出来。YOLO 最适合对象识别与分组。
总结
机器学习算法使自动驾驶汽车的存在成为可能。它允许汽车从摄像头和其他传感器收集有关其周围环境的数据,对其进行解释,并决定采取什么行动。机器学习甚至允许汽车学习如何像人类一样(甚至比人类更好)执行这些任务。这就得出一个合理的结论,即机器学习算法和自动驾驶汽车是交通的未来。
机器学习课程大纲
以下是机器学习课程大纲,建议大家看一看,毕竟随着AI技术对日常生活渗透程度的不断加深,市场对AI技术人才的需求也在日益增长。莫要等AI处在数字时代大风口时才意思到自己还没跨入AI一行。

这篇关于百度萝卜快跑正式“接单”——看AI如何带帝都子民奔向远方的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








