本文主要是介绍【正点原子STM32连载】第十一章 按键输入实验 摘自【正点原子】APM32E103最小系统板使用指南,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1)实验平台:正点原子APM32E103最小系统板
2)平台购买地址:https://detail.tmall.com/item.htm?id=609294757420
3)全套实验源码+手册+视频下载地址: http://www.openedv.com/docs/boards/xiaoxitongban
第十一章 按键输入实验
上一章中介绍了GPIO的输出模式,并用其控制LED的亮灭。在实际的应用尝尽中,还会需要使用到GPIO的输入模式,来获取外部的输入信号,例如获取按键的状态。通过本章的学习,读者将学习到GPIO作为输入模式的使用。
本章分为如下几个小节:
11.1 硬件设计
11.2 程序设计
11.3 下载验证
11.1 硬件设计
11.1.1 例程功能
- 按下KEY0按键可控制LED0状态翻转,按下KEY_UP按键可控制LED1翻转。
11.1.2 硬件资源 - LED
LED0 - PB5
LED1 - PE5 - 按键
KEY0 - PE4
KEY_UP - PA0
11.1.3 原理图
本章实验使用的两个APM32E103最小系统板板载按键,分别为KEY0按键和KEY_UP按键,其于板载MCU的连接原理图,如下图所示:
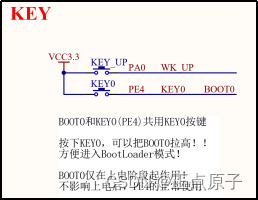
图11.1.3.1 按键与MCU的连接原理图
从上面的原理图中可以看出,KEY0按键和KEY_UP按键的一端连接到了电源正极,而另一端分别与MCU的PE4引脚和PA0引脚相连接,因此当任意一个按键被按下时,MCU对应的引脚都能够读取到高电平的状态,而当松开按键后,MCU对应的引脚读取到的电平状态却是不确定的,因此用于读取KEY0按键和KEY_UP按键的PE4引脚和PA0引脚不仅要配置为输入模式,还需要配置成下拉,使对应引脚在悬空时被下拉在电源负极。
11.2 程序设计
11.2.1 Geehy标准库的GPIO驱动
本章实验中要通过读取GPIO引脚的输入状态来判断按键是否被按下,以此来控制对应LED的状态翻转,因此对于判断按键的状态,需要一下几个步骤:
①:配置GPIO引脚为输入模式和下拉
②:读取GPIO引脚的输入状态
在Geehy标准库中对应的驱动函数如下:
①:配置GPIO引脚
请见第10.2.1小节中配置GPIO引脚的相关内容。
②:读取GPIO引脚输入电平
该函数用于读取GPIO引脚的输入电平(高电平或低电平),其函数原型如下所示:
uint8_t GPIO_ReadInputBit(GPIO_T* port, uint16_t pin);
该函数的形参描述,如下表所示:
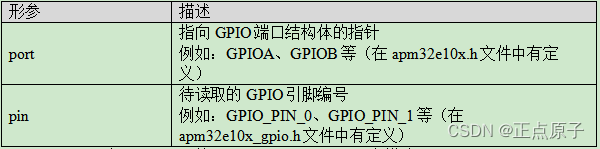
表11.2.1.1 函数GPIO_ReadInputBit()形参描述
该函数的返回值描述,如下表所示:
返回值 描述
BIT_SET GPIO引脚输入的电平为高电平
BIT_RESET GPIO引脚输入的电平为低电平
表11.2.1.2 函数GPIO_ReadInputBit()返回值描述
该函数的使用示例,如下所示:
#include "apm32e10x.h"
#include "apm32e10x_gpio.h"void example_fun(void)
{uint8_t value;/* 读取PA0引脚输入电平 */value = GPIO_ReadInputBit(GPIOA, GPIO_PIN_0);if (value == BIT_SET){/* Do something. */}else{/* Do something. */}
}
11.2.2 按键驱动
按键驱动主要就是读取GPIO引脚的输入状态,以此判断按键是否被按下,本章实验中,按键驱动的驱动代码包括key.c和key.h两个文件。
根据原理图可知,应当将PE4引脚和PA0引脚配置为下拉输入模式,并在需要读取KEY0按键(KEY_UP按键)状态的时候,读取PE4引脚(PA0引脚)的输入电平,若读取到PE4引脚(PA0引脚)的输入电平为高电平,则说明KEY0按键(KEY_UP按键)被按下,反之,则说明KEY0按键(KEY_UP按键)没有被按下。
按键驱动中,对引脚的定义,如下所示:
#define KEY0_GPIO_PORT GPIOE
#define KEY0_GPIO_PIN GPIO_PIN_4
#define KEY0_GPIO_CLK_ENABLE() \do { \RCM_EnableAPB2PeriphClock(RCM_APB2_PERIPH_GPIOE); \} while (0)#define WKUP_GPIO_PORT GPIOA
#define WKUP_GPIO_PIN GPIO_PIN_0
#define WKUP_GPIO_CLK_ENABLE() \do { \RCM_EnableAPB2PeriphClock(RCM_APB2_PERIPH_GPIOA); \} while (0)
按键驱动中,操作引脚的定义,如下所示:
#define KEY0 GPIO_ReadInputBit(KEY0_GPIO_PORT, KEY0_GPIO_PIN)
#define WK_UP GPIO_ReadInputBit(WKUP_GPIO_PORT, WKUP_GPIO_PIN)
按键驱动中,按键的初始化函数,如下所示:
/*** @brief 初始化按键* @param 无* @retval 无*/
void key_init(void)
{GPIO_Config_T gpio_init_struct;KEY0_GPIO_CLK_ENABLE();WKUP_GPIO_CLK_ENABLE();gpio_init_struct.pin = KEY0_GPIO_PIN; /* KEY0引脚 */
gpio_init_struct.mode = GPIO_MODE_IN_PD; /* 下拉输入 */
gpio_init_struct.speed = GPIO_SPEED_50MHz; /* 高速 */GPIO_Config(KEY0_GPIO_PORT, &gpio_init_struct); /* 配置KEY0引脚 */gpio_init_struct.pin = WKUP_GPIO_PIN; /* KEY_UP引脚 */
gpio_init_struct.mode = GPIO_MODE_IN; /* 下拉输入 */
gpio_init_struct.speed = GPIO_SPEED_50MHz; /* 高速 */GPIO_Config(WKUP_GPIO_PORT, &gpio_init_struct); /* 配置KEY_UP引脚 */
}
按键的初始化函数中,使能了KEY0按键和KEY_UP按键对应引脚的GPIO端口时钟,并将其配置为输入模式和下拉。
按键的驱动中,扫描按键状态的函数,如下所示:
/*** @brief 扫描按键* @note 该函数具有响应优先级(同时按下多个按键):KEY_UP > KEY0* @param mode: 扫描模式* @arg 不支持连按(当按键按下不放时,只有第一次调用会返回键值,* 必须松开以后,再次按下才会返回其他键值)* @arg 支持连续按(当按键按下不放时,每次调用该函数都会返回键值)* @retval 键值* @arg KEY0_PRES: KEY0按下* @arg WKUP_PRES: KEY_UP按下*/
uint8_t key_scan(uint8_t mode)
{static uint8_t key_up = 1; /* 按键松开标志 */uint8_t keyval = 0;if (mode == 1) /* 支持连按 */{key_up = 1;}/* 按键松开标志为1,且有按键按下 */if ((key_up == 1) && ((KEY0 == 1) || (WK_UP == 1))){key_up = 0;delay_ms(10); /* 去抖动 */if (KEY0 == 1){keyval = KEY0_PRES;}if (WK_UP == 1){keyval = WKUP_PRES;}}else if ((KEY0 == 0) && (WK_UP == 0)) /* 没有按键按下,标记按键松开 */{key_up = 1;}return keyval; /* 返回键值 */
}
以上函代码就实现了按键扫描,且具有按键消抖的功能。
11.2.3 实验应用代码
本实验的应用代码,如下所示:
int main(void)
{uint8_t key;NVIC_ConfigPriorityGroup(NVIC_PRIORITY_GROUP_4); /* 设置中断优先级分组为组4 */sys_apm32_clock_init(15); /* 配置系统时钟 */delay_init(120); /* 初始化延时功能 */usart_init(115200); /* 初始化串口 */led_init(); /* 初始化LED */
key_init(); /* 初始化按键 */
LED0(0); /* 先点亮LED0 */while (1){key = key_scan(0); /* 扫描按键 */if (key)
{
switch (key){case WKUP_PRES: /* KEY_UP被按下 */{LED0_TOGGLE(); /* LED1状态翻转 */break;}case KEY0_PRES: /* KEY0被按下 */{LED0_TOGGLE(); /* LED0状态翻转 */LED1_TOGGLE(); /* LED1状态翻转 */break;}
}
}else
{
delay_ms(10);
}}
}
可以看到应用代码中,在初始化完LED和按键并点亮一个LED灯后,就进入了一个while循环,在循环中,每间隔10毫秒就调用key_scan()函数扫描以此按键的状态,如果扫描到KEY0按键或KEY_UP按键被按下,则反转对应LED的亮灭状态。
11.3 下载验证
在完成编译和烧录操作后,可以看到板子上的LED0是处于亮起的状态而LED1处于熄灭状态,若此时按下并释放一次KEY0按键,则能够看到LED0和LED1的亮灭状态发生了一次翻转,同样的,若此时按下并释放一次KEY_UP按键,则能够看到LED0的亮灭状态发生了一次翻转,与预期的实验现象效果相符。
这篇关于【正点原子STM32连载】第十一章 按键输入实验 摘自【正点原子】APM32E103最小系统板使用指南的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







