本文主要是介绍机器人制作开源方案 | 智能助老机器人,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
作者:刘颖、王浩宇、党玉娟
单位:北京科技大学
指导老师:刘新洋、栗琳
1. 项目背景
1.1 行业背景
随着越来越多的服务机器人进入家庭,应用场景呈现多元化和专业化,机器人产业生态体系正在不断完善,服务机器人出现爆发式增长。如何健康养老、助老一直是近几年的热点话题。在国务院印发的《中国制造 2025》战略文件中,国家层面对于智能服务机器人领域如医疗康复、养老服务、快递服务、多功能工业服务等都进行了行动部署。《扩大和升级信息消费三年行动计划》文件中提到要发展家庭服务机器人等智能健康养老服务产品,满足养老需求等。“智慧助老”活动在全国各地开展,助力老人享受数字化、智能化所带来的便利。
数字时代,让老年人“不掉线”。助老产品层出不穷,结合老年人的身心特点,针对性地开发了有温度的适老产品。除了各种数字化助老产品,助老服务机器人也受到大众关注,如何更智能助老也成为助老服务机器人技术发展新方向。“科椅”-智能助老机器人,顺应行业市场的发展方向,响应国家政策。
1.2 需求分析
(1) 智能轮椅机器人需求分析
产品研发的目标受众是行动不便、腿脚不灵活的人群,满足使用者外出进行户外活动的需求。中国社会人口老龄化程度高,逐步进入老龄化社会,许多大城市的老年人比例以接近 20%。与此同时肢体残疾人的人口近6000万,在他们当中,许多人因行走不便需依靠轮椅进行正常生活。而普通轮椅功能单一,远远不能满足其需求,所以智能轮椅机器人的市场有着巨大的发展空间。
(2) 智能轮椅机器人与普通代步车的分析
目前市场上大多的轮椅产品只满足使用者在户外简单活动的需求,绝大部分只支持如电动自行车的功能,并未真正解决行动不便人群的痛点问题。遇到特殊情况时,如需爬楼梯、取高处物体等情况时,使用者仍无法独自解决。与现有轮椅产品不同的是,“科椅”将行走障碍人群以及部分手脚不灵活的人群考虑在内,进行功能设计以及产品设计,有效解决使用者的难题。
2. 作品介绍
2.1 作品简介
基于中国社会老龄化带来的市场需求,结合市面上助老轮椅功能简单、难以解决现实痛点的问题分析,本团队设计了一款智能助老轮椅,其功能多样,拥有遥控、语音、手势多种控制方式,对用户更加友好,同时注重安全问题。

作品采用探索者模块进行搭建制作,除了拥有轮椅的基础行进和楼梯攀爬的基础功能外,还拥有人脸智能识别、语音指令控制、蓝牙无线遥控、手势识别控制以及紧急情况提醒五大智能功能,使轮椅智能化贴心化,让老年人也可以享受到科技带来的便利。
2.2 功能详述
2.2.1人脸识别解锁功能
智能轮椅前方设有摄像头,启动轮椅电源后,使用者面对智能轮椅摄像头,轮椅自动进行人脸识别。识别用户成功后,智能轮椅解锁,以此增强智能轮椅安全性。
2.2.2 蓝牙无线遥控功能
使用手机下载并安装本作品专用手机APP,安装完成后开启手机蓝牙,并打开APP,进入APP主页后选择“连接设备”。蓝牙连接成功后APP自动提醒蓝牙连接成功,显示如下操作页面,即可触屏控制轮椅。使用蓝牙无线遥控可以实现如下功能:

(1)蓝牙遥控行走
成功连接蓝牙后,单击或长按界面中前进、后退、左转、右转虚拟按键,便可实现轮椅的蓝牙遥控行走。
(2)速度挡位转换
成功连接蓝牙后,单击“速度+”虚拟按键,便可实现轮椅的行走速度挡位切换。本作品共设计四个速度挡位可供选择。
(3)座位升降调节
成功连接蓝牙后,单击“座位上升”或“座位下降”虚拟按键,便可实现轮椅座位升降调节。座椅升降高低可自主控制,无固定挡位。
(4)模拟爬行楼梯
成功连接蓝牙后,控制智能轮椅行走至楼梯台阶处,长按“履带抬起”,待前履带大约与楼梯台阶平行时,松开虚拟按键,后按“前进”虚拟
按键前进适当距离,按“履带落下”将前履带放置在楼梯上同时会将轮椅抬起与楼梯相近的斜度,最后再按“前进”轮椅便可稳步爬上楼梯。
2.2.3 语音指令功能
语音指令功能默认关闭,通过人脸识别后,说出预设的语音密码(如“芝麻开门”)可开启语音指令功能,避免他人语音对控制轮椅的干扰。说出“关闭语音”,即可关闭语音指令功能。
在智能轮椅附近说出“前进”“后退”“停下”“左转”“右转”等指令(指令名称同蓝牙遥控里按键的名称一致),智能轮椅“听到”指令后,会立即做出相对应的动作,实现语音指令功能。
2.2.4 手势识别功能
针对特殊失能人群,提供手势识别控制行走的功能,可提供前后进和左右转的功能。开启轮椅且通过人脸识别后,调整摄像头朝向对准轮椅上的用户,用户在摄像头前做出“前进“停止”等手势,智能轮椅会自动识别手势,并做出相应动作(注:本作品使用的手势训练器由百度智能云提供)。
2.2.5 紧急情况提醒
若轮椅发生意外侧翻,智能轮椅会自动检测到轮椅侧翻,并自动发送邮件给老人子女或紧急联系人,告知智能轮椅发生意外侧翻,请尽快关注。邮件发送人需提前设置,若有需要也可改为短信发送。
3. 设计方案
3.1 机器人系统概述
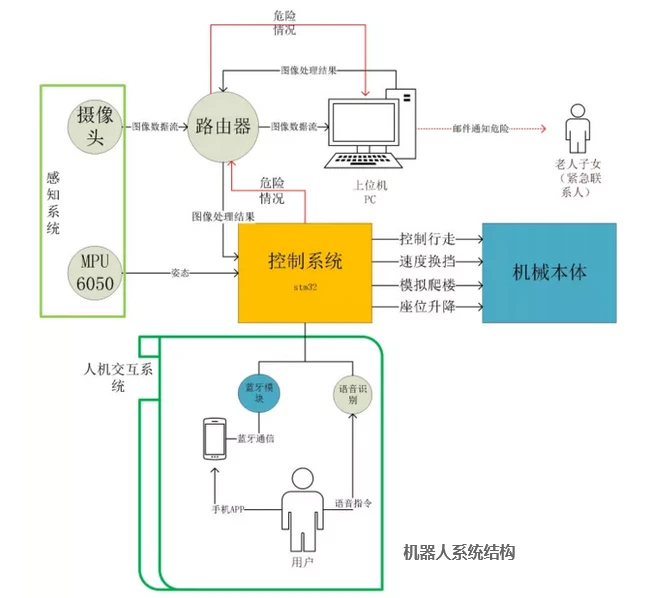
本作品主要使用探索者模块搭建。机器人系统结构大致分为:机械本体、控制系统、人机交互系统、感知系统、上位机PC。
机械本体由探索者机器人套件组装;控制系统采用stm32F407作为主控板,其作为整个机器人控制系统的核心,接受、处理传感器数据及消息,控制机器人的行为动作;人机交互系统基于蓝牙串口模块及手机App、语音模块实现手机蓝牙遥控功能和语音控制;感知系统由摄像头和MPU6050组成,摄像头采集图像数,经路由器发送给上位机进行图像处理,MPU6050采集姿态数据发送给stm32进行姿态解算;上位机PC,主要负责图像处理,接收到下位机传来的轮椅翻车消息后,发邮件告知老人子女危险情况。
3.2 机械本体
机械本体由探索者机器人套件组装,底盘采用双履带底盘,履带式相较轮式抓地性更强,适用环境范围广,双节履带为平稳爬楼创建了可行性,前、后履带都由直流电机驱动。座椅的升降,舵机为驱动动力来源,利用复合的连杆传动,使座位上升、下降。

3.3 控制系统
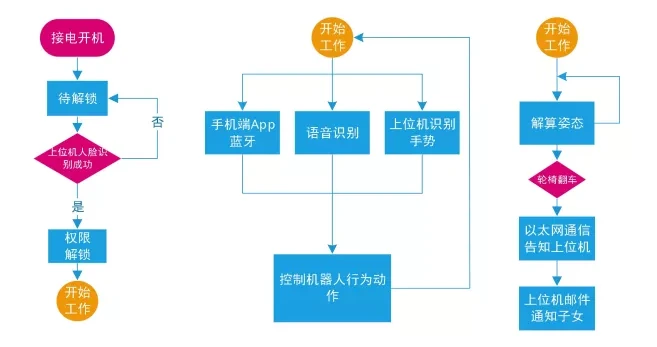
控制系统使用 stm32F407 单片机为主控板,在集成开发环境 keil5 中,使用标准库开发。单片机上电后,处于等待解锁状态,摄像头将图像传给上位机,待上位机传来人脸识别成功消息后,权限解锁,用户可控制机器人。单片机直接控制整个机器人的运动,其指令来源有三个方向:
1)手机端 App 蓝牙
2)语音识别模块,识别人声
3)上位机手势识别
同时,单片机不断获取 MPU6050 采集的原始姿态数据,进行姿态融合解算,检测到轮椅翻车后,将翻车消息经路由器告知上位机。
3.4 人机交互系统
交互系统基于HC-05蓝牙串口模块、手机端App蓝牙通信和LD3320语音识别模块实现。人脸识别解锁后,打开手机App,连接HC-05蓝牙,可在手机App上遥控机器人。语音识别模块能识别人的语音,说出预设好的语音密码(如“芝麻开门”)可以开启语音功能,避免他人语音对控制轮椅的干扰,实现语音控制。
3.5 感知系统
感知系统由摄像头、MPU6050组成。摄像头采集图像数据经路由器传给上位机,在上位机完成人脸识别、手势识别。MPU6050,以IIC通信协议,将加速度传感器数据、陀螺仪数据发送给stm32单片机,单片机中程序进行姿态解算,得到轮椅的RPY角;轮椅翻车后,俯仰角或横滚角过大,从而感知到轮椅翻车。
3.6 上位机PC
上位机PC为机载PC,连接路由器WIFI,运行python程序,基于OpenCV实现人脸识别,使用百度云智能提供的手势训练器识别手势,通过套接字编程实现与下位机的以太网TCP通信,将图像处理结果发送给下位机;收到下位机轮椅翻车的消息后,程序立即切换WIFI为能访问internet的WIFI热点,使用SMTP协议发送邮件,告知老人子女危险情况。
4. 创新创意
(1) 市面的轮椅产品几乎都只实现了普通代步车的功能,本产品针对产品受众进行功能设计分析,在代步车的基础上,增加上下楼梯、供老人拿取高处物品、语音控制运动的功能。
(2) 为满足使用者对速度的需求,设计四个变速档位,提供不同的行走速度。
(3) 采用关节双履带爬楼结构设计,在保证前进速度的同时,采用稳定的爬梯步态,实现爬梯需求。
(4) 为防止轮椅的丢失,设定面部解锁功能,未解锁时锁死无法进行行走。
(5) 针对特殊失能人群,提供手势识别控制行走的功能,可提供前后进和左右转的功能。
(6) 为防止意外发生时无人知晓,设置了感知危险并紧急提醒功能,当轮椅翻车或受到剧烈撞击后,及时通知老人亲属。
5. 示例程序
from socket import *import cv2from PIL import Image, ImageDraw, ImageFontimport smtplibfrom email.mime.text import MIMETextfrom email.mime.multipart import MIMEMultipartimport pywifi,timefrom pywifi import constimport osimport sysimport numpy as npimport timeimport threadingfrom aip import AipBodyAnalysisimport base64def cv2ImgAddText(img, text, left, top, textColor=(0, 255, 0), textSize=20):if (isinstance(img, np.ndarray)): # 判断是否OpenCV图片类型img = Image.fromarray(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))# 创建一个可以在给定图像上绘图的对象draw = ImageDraw.Draw(img)# 字体的格式fontStyle = ImageFont.truetype("simsun.ttc", textSize, encoding="utf-8")# 绘制文本draw.text((left, top), text, textColor, font=fontStyle)# 转换回OpenCV格式return cv2.cvtColor(np.asarray(img), cv2.COLOR_RGB2BGR)#读取人脸数据def read_images(path , sz=None):c=0X,y =[],[]names=[]for dirname,dirnames,filenames in os.walk(path):for subdirname in dirnames:subject_path=os.path.join(dirname,subdirname)for filename in os.listdir(subject_path):try:if(filename==".directory"):continuefilepath=os.path.join(subject_path,filename)im=cv2.imread(os.path.join(subject_path,filename),cv2.IMREAD_GRAYSCALE)if(im is None):print("imges"+filepath+"is None")if(sz is not None):im=cv2.resize(im,sz)X.append(np.asarray(im,dtype=np.uint8))y.append(c)except :print("unexpected error")raisec=c+1names.append(subdirname)return [names,X,y]def face_rec():cap=cv2.VideoCapture(1)now=time.time()while True:ret, frame= cap.read()x,y=frame.shape[0:2]small_frame= cv2.resize(frame,(int(y/2),int(x/2)))result = small_frame.copy()gray = cv2.cvtColor(small_frame, cv2.COLOR_BGR2GRAY)faces = face_cascade.detectMultiScale(gray, 1.3, 5)for (x, y, w, h) in faces:result = cv2.rectangle(result, (x, y), (x + w, y + h), (255, 0, 0), 2)roi = gray[x:x + w, y:y + h]try:roi = cv2.resize(roi, (200, 200), interpolation=cv2.INTER_LINEAR)[p_label, p_confidence] = model.predict(roi)print("置信度 = ", p_confidence)# print(names[p_label])if( p_confidence < 6000 ) :# cv2.putText(result, names[p_label],(x,y-20),cv2.FONT_HERSHEY_SIMPLEX,1,255,2)result=cv2ImgAddText(result,"识别成功,欢迎使用",x,y-20,(0,255,0),20)cv2.imshow("recognize_face", result)cv2.waitKey(3000)cap.release()cv2.destroyAllWindows()return 1except:continuennow = time.time()cv2.imshow("recognize_face", result)# 超时if nnow - now > 30:result=cv2ImgAddText(result,"超时,识别失败",x,y-20,(0,255,0),20)cv2.imshow("recognize_face", result)cv2.waitKey(3000)cap.release()cv2.destroyAllWindows()return -1if cv2.waitKey(30) & 0xFF == ord('q'):breakcap.release()cv2.destroyAllWindows()return 0read_dir = "./data"[names, X, y] = read_images(read_dir)y = np.asarray(y, dtype=np.int32) # 生成训练模型model = cv2.face.EigenFaceRecognizer_create()# 训练模型model.train(np.asarray(X), np.asarray(y))face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')if __name__ == "__main__":while True:zzz=face_rec()print(zzz)if(zzz==1):print('识别成功')breakif(zzz==-1) :print('超时')continuex=eval(input("请输入:"))if(x==1):continueelse:breakdef wifi_connect_status():wifi = pywifi.PyWiFi()iface = wifi.interfaces()[0] #acquire the first Wlan card,maybe notif iface.status() in [const.IFACE_CONNECTED,const.IFACE_INACTIVE]:print("wifi connected!")return 1else:print("wifi not connected!")return 0def scan_wifi():wifi = pywifi.PyWiFi()iface = wifi.interfaces()[0]iface.scan()time.sleep(1)basewifi = iface.scan_results()for i in basewifi:print("wifi scan result:{}".format(i.ssid))print("wifi device MAC address:{}".format(i.bssid))return basewifidef connect_wifi(wifiname="Redmi", ssid="1234abcd"):wifi = pywifi.PyWiFi()ifaces = wifi.interfaces()[0]print(ifaces.name()) #输出无线网卡名称ifaces.disconnect()time.sleep(3)profile = pywifi.Profile() #配置文件profile.ssid = wifiname #wifi名称profile.auth = const.AUTH_ALG_OPEN #需要密码profile.akm.append(const.AKM_TYPE_WPA2PSK) #加密类型profile.cipher = const.CIPHER_TYPE_CCMP #加密单元profile.key = ssid #wifi密码ifaces.remove_all_network_profiles() #删除其它配置文件tmp_profile = ifaces.add_network_profile(profile) #加载配置文件ifaces.connect(tmp_profile)time.sleep(5)isok = Trueif ifaces.status() == const.IFACE_CONNECTED:print("connect successfully!")else:print("connect failed!")time.sleep(1)return isok# def main():# wifi_connect_status()# #scan_wifi()# connect_wifi()fromaddr = "2775501182@qq.com"#发送者的qq邮箱toaddr = "2775501182@qq.com"#接收者的qq邮箱msg = MIMEMultipart()#实例化一个MIMEMultipartmsg['From'] = fromaddr#设置来源的地址msg['To'] = toaddr #设置目的地的地址msg['Subject'] = "助老机器人提醒"#设置的邮件的主题def clientsend(servername , serverPort, sentence):clientSocket=socket(AF_INET, SOCK_STREAM)clientSocket.connect((servername , serverPort))clientSocket.send(sentence.encode())clientSocket.close()def clientrec(servername , serverPort) :clientSocket=socket(AF_INET, SOCK_STREAM)clientSocket.connect((servername , serverPort))print('连接成功')recvSentence=clientSocket.recv(30)print(recvSentence)print('收到字符串:'+recvSentence.decode('GBK'))return recvSentence.decode('GBK')def SMTPsend() :body = '【智能助老轮椅反馈】:\n检测到轮椅侧翻,老人可能有危险'msg.attach(MIMEText(body, 'plain'))#第二个‘plain’为设置正文的格式server = smtplib.SMTP("smtp.qq.com",587)#设置SMTP的服务器和其相对应的SMTP接口server.starttls()#开始server.login(fromaddr ,"oowcfniaveeidefh")#第二个参数为刚刚保存的邮件发送端的最后一个授权码text = msg.as_string()#转换message的格式server.sendmail(fromaddr, toaddr, text)#发送邮件server.quit()#结束print('发送邮件成功')# x=50# # while x :# # clientsend('192.168.8.163', 2001,'rr')# # x=x-1def accidentRec() :while 1:# sentence='2'# sentence=sentence.encode()# clientSocket.send(sentence)global clientSocketrecvSentence=clientSocket.recv(30)print(recvSentence)print('收到字符串:'+recvSentence.decode('GBK'))Rec=recvSentence.decode('GBK')if(Rec.strip() =='G'):clientSocket.close()wifi_connect_status()connect_wifi()SMTPsend()connect_wifi("GL-AR150-97a", "goodlife")clientSocket=socket(AF_INET, SOCK_STREAM)clientSocket.connect(('192.168.8.1',2001))# clientSocket=socket(AF_INET, SOCK_STREAM)# clientSocket.connect(("192.168.8.1",2001))# print('连接成功')# sentence='L'# sentence=sentence.encode()# clientSocket.send(sentence) #告知下位机已人脸解锁成功# print('已发送L')# accidentRec()# threading.Thread(target=accidentRec).start()# wifi_connect_status()# connect_wifi()# SMTPsend()# connect_wifi("GL-AR150-97a", "goodlife")# clientSocket=socket(AF_INET, SOCK_STREAM)# clientSocket.connect(('192.168.8.1',2001))# while True:# zzz=face_rec()# print(zzz)# if(zzz==1):# print('识别成功')# break# if(zzz==-1) :# print('超时')# continue# # x=eval(input("请输入:"))# # if(x==1):# # continue# # else:# # break# sentence='L'# sentence=sentence.encode()# clientSocket.send(sentence) #告知下位机已人脸解锁成功# print('已发送L,下位机解锁')APP_ID = '27841617'API_KEY = 'vnUnC94DCH5rQz7WgGEboptk'SECRET_KEY = 'ijtL5gcQSaWQmrAUIoh6EnPPoKgxIufd'client = AipBodyAnalysis(APP_ID, API_KEY, SECRET_KEY)""" 读取图片 """def get_file_content(filePath):with open(filePath, 'rb') as fp:return fp.read()cap = cv2.VideoCapture(1)while 1:ret, frame=cap.read()cv2.imwrite('1.jpg',frame)image = get_file_content('1.jpg')x=client.gesture(image)# if x==0 :# print("None")# else :# y=client.gesture(image)# print(y)if x.get('result') :y=x.get('result')print(y[0]['classname'])sentence=y[0]['classname']sentence=sentence.encode()#clientSocket.send(sentence)cv2.imshow("img",frame)if cv2.waitKey(1) == ord('q') :breakcap.release()cv2.destroyAllWindows()#clientSocket.close()#clientsend('192.168.8.1',2001,'gusdfghwn')# print('结束')# CameraIp = "http://192.168.8.1:8083/?action=stream"# cap = cv2.VideoCapture(CameraIp)# while 1:# ret,frame=cap.read()# cv2.imshow("hl", frame)# cv2.waitKey(100)# while 1:# Rec = clientrec('10.38.201.27' , 8080 )# if(Rec.strip() == 'warning!!!') :# SMTPsend()# else:# print('不成功')*更多详情请见:【S034】智能助老机器人
这篇关于机器人制作开源方案 | 智能助老机器人的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







