本文主要是介绍高云GW1NSR-4C开发板M3硬核应用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.M3硬核IP下载:Embedded M3 Hard Core in GW1NS-4C - 科技 - 广东高云半导体科技股份有限公司 (gowinsemi.com.cn)
特别说明:IDE必须是1.9.9及以后版本,1.9.8会导致编译失败(1.9.8下1.1.3版本IP核可用)
以下根据官方提供的开发包,在GW1NSR-4C开发板上实现8个led点灯及串口通信测试。
2.FPGA综合:
解压文件,打开\Gowin_EMPU(GW1NS-4C)_V1.2\solution\running_in_sram_from_emb_userflash\ref_design\FPGA_RefDesign\DK_START_GW1NSR4C_QN48P_V1.1\gowin_empu下工程,添加器件GW1NSR-4C,正常的话应该可以综合(Synthesize)。
由于板卡实际晶振为27M,且需要点亮8个led,串口引脚也需要重新配置,故作出一定修改。修改gowin_pllvr.v文件,相关参数更改如下:
defparam pllvr_inst.FCLKIN = "27";
defparam pllvr_inst.DYN_IDIV_SEL = "false";
defparam pllvr_inst.IDIV_SEL = 8;
defparam pllvr_inst.DYN_FBDIV_SEL = "false";
defparam pllvr_inst.FBDIV_SEL = 25;
defparam pllvr_inst.DYN_ODIV_SEL = "false";
defparam pllvr_inst.ODIV_SEL = 8;
defparam pllvr_inst.PSDA_SEL = "0000";
defparam pllvr_inst.DYN_DA_EN = "true";
defparam pllvr_inst.DUTYDA_SEL = "1000";
defparam pllvr_inst.CLKOUT_FT_DIR = 1'b1;
defparam pllvr_inst.CLKOUTP_FT_DIR = 1'b1;
defparam pllvr_inst.CLKOUT_DLY_STEP = 0;
defparam pllvr_inst.CLKOUTP_DLY_STEP = 0;
defparam pllvr_inst.CLKFB_SEL = "internal";
defparam pllvr_inst.CLKOUT_BYPASS = "false";
defparam pllvr_inst.CLKOUTP_BYPASS = "false";
defparam pllvr_inst.CLKOUTD_BYPASS = "false";
defparam pllvr_inst.DYN_SDIV_SEL = 2;
defparam pllvr_inst.CLKOUTD_SRC = "CLKOUT";
defparam pllvr_inst.CLKOUTD3_SRC = "CLKOUT";
defparam pllvr_inst.DEVICE = "GW1NSR-4C";修改gowin_empu_template.v文件:
//sys_clk max 78MHz
//GPIO
//UART0`resetallmodule Gowin_EMPU_Template (sys_clk,reset_n,led,uart0_rxd,uart0_txd
);input sys_clk;
input reset_n;//GPIO
output [7:0] led;//UART0
input uart0_rxd;
output uart0_txd;/*--------------------Gowin_EMPU_Top---------------------------*/
wire mclk; //mcu clock
wire clkin = sys_clk;
wire [7:0] gpioout_o;
wire [15:0] gpioouten_o;//MCU system clock = 78MHz
Gowin_PLLVR u_Gowin_PLLVR(.clkout(mclk), //MCU 78MHz.clkin(clkin) //input clkin 27MHz
);Gowin_EMPU_Top u_Gowin_EMPU_Top (.sys_clk(mclk),.reset_n(reset_n),//GPIO.gpioin(16'h0000),.gpioout({gpioout_o,led}),.gpioouten(gpioouten_o),//UART0.uart0_rxd(uart0_rxd),.uart0_txd(uart0_txd)
);endmodule修改引脚约束文件:
//MCU system clock
IO_LOC "sys_clk" 22;//F_CLK
IO_PORT "sys_clk" IO_TYPE=LVCMOS18;//MCU system reset
IO_LOC "reset_n" 23;//KEY2
IO_PORT "reset_n" IO_TYPE=LVCMOS25;//LED
IO_LOC "led[7]" 34;
IO_PORT "led[7]" IO_TYPE=LVCMOS25;
IO_LOC "led[6]" 35;
IO_PORT "led[6]" IO_TYPE=LVCMOS25;
IO_LOC "led[5]" 31;
IO_PORT "led[5]" IO_TYPE=LVCMOS25;
IO_LOC "led[4]" 32;
IO_PORT "led[4]" IO_TYPE=LVCMOS25;
IO_LOC "led[3]" 29;
IO_PORT "led[3]" IO_TYPE=LVCMOS25;
IO_LOC "led[2]" 30;
IO_PORT "led[2]" IO_TYPE=LVCMOS25;
IO_LOC "led[1]" 27;
IO_PORT "led[1]" IO_TYPE=LVCMOS25;
IO_LOC "led[0]" 28;
IO_PORT "led[0]" IO_TYPE=LVCMOS25;//UART0
IO_LOC "uart0_rxd" 45;//UART_RXD
IO_LOC "uart0_txd" 43;//UART_TXD
IO_PORT "uart0_rxd" IO_TYPE=LVCMOS25;
IO_PORT "uart0_txd" IO_TYPE=LVCMOS25;4.MCU工程:
打开\Gowin_EMPU(GW1NS-4C)_V1.2\ref_design\MCU_RefDesign\Keil_RefDesign\uart\PROJECT下的Keil工程,在此基础上修改main.c文件,波特率改为14400bps。:
/* Includes ------------------------------------------------------------------*/
#include "gw1ns4c.h"
#include <stdio.h>
/* Declarations ------------------------------------------------------------------*/
void UartInit(void);
void delay_ms(__IO uint32_t delay_ms);
void GPIOInit(void);
/* Functions ------------------------------------------------------------------*/
int main()
{
SystemInit(); //Initializes system
UartInit(); //Initializes UART0
GPIOInit(); //Initializes GPIO
printf("\nUart Initialed!\r\n");
printf("\n");
while(1)
{
GPIO_ResetBit(GPIO0, GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7);//|GPIO_Pin_1|GPIO_Pin_2); //LED on
printf("Led ON\r\n");
delay_ms(1000);
GPIO_SetBit(GPIO0, GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7);//|GPIO_Pin_1|GPIO_Pin_2); //LED off
printf("Led OFF\r\n");
delay_ms(1000);
}
}
//Initializes UART0
void UartInit(void)
{
UART_InitTypeDef UART_InitStruct;
UART_InitStruct.UART_Mode.UARTMode_Tx = ENABLE;
UART_InitStruct.UART_Mode.UARTMode_Rx = ENABLE;
UART_InitStruct.UART_Int.UARTInt_Tx = DISABLE;
UART_InitStruct.UART_Int.UARTInt_Rx = DISABLE;
UART_InitStruct.UART_Ovr.UARTOvr_Tx = DISABLE;
UART_InitStruct.UART_Ovr.UARTOvr_Rx = DISABLE;
UART_InitStruct.UART_Hstm = DISABLE;
UART_InitStruct.UART_BaudRate = 14400;//Baud Rate
UART_Init(UART0,&UART_InitStruct);
}
//delay ms
void delay_ms(__IO uint32_t delay_ms)
{
for(delay_ms=(SystemCoreClock/16000)*delay_ms; delay_ms != 0; delay_ms--);
}
//Initializes GPIO
void GPIOInit(void)
{
GPIO_InitTypeDef GPIO_InitType;
GPIO_InitType.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitType.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitType.GPIO_Int = GPIO_Int_Disable;
GPIO_Init(GPIO0,&GPIO_InitType);
}
如下图,在编译时,Option for Target 'uart'->User->After Build/Rebuild->Run#1处的D:\Keil_v5目录,根据个人实际进行修改,例如本人的为E:\Keil_v5\。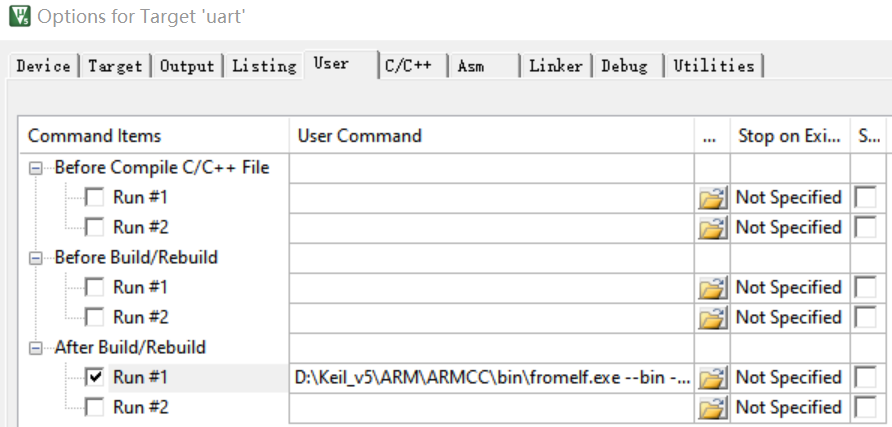 5.下载:
5.下载:
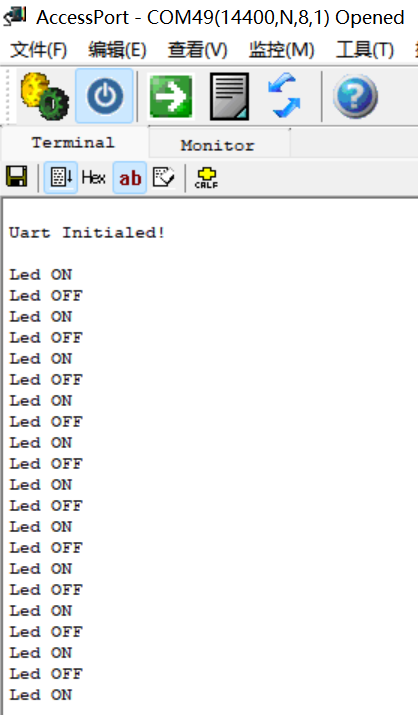
选择“MCU Mode”,如下图,需要两个文件:“.fs”FPGA文件和".bin"单片机文件。完成后需要长按Reset按键(即核心板上靠近中间的按键,23引脚)。分别接上led和USB-TTL,可以看出8个led按照约1秒的间隔时间闪烁,串口调试助手则交替收到“Led ON”和“Led OFF”。

6.完整的工程文件:
https://download.csdn.net/download/weixin_41784968/88614259
https://download.csdn.net/download/weixin_41784968/88614264
这篇关于高云GW1NSR-4C开发板M3硬核应用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







