本文主要是介绍「自控原理」6 频域校正,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本节介绍频域串连校正、反馈校正、复合校正
文章目录
- 频率法串连校正
- 串联超前校正
- 超前网络特性
- 超前校正方法与例题
- 串联滞后校正
- 滞后网络特性
- 滞后校正方法与例题
- 串连滞后-超前校正
- 滞后-超前网络特性
- 滞后-超前校正方法与例题
- 串联PID校正
- PID网络
- PID校正方法与例题
- 频域法反馈校正
- 反馈校正的作用
- 反馈校正装置的设计
- 前馈与反馈复合控制
- 按扰动补偿的复合控制
- 按输入补偿的复合控制
频率法串连校正
关于校正之前在时域也涉及过,概念就不再重复。

串联超前校正
校正装置的特性是相位超前的,加在系统中可以“拉高”相频曲线,提高相角裕度。
超前网络特性
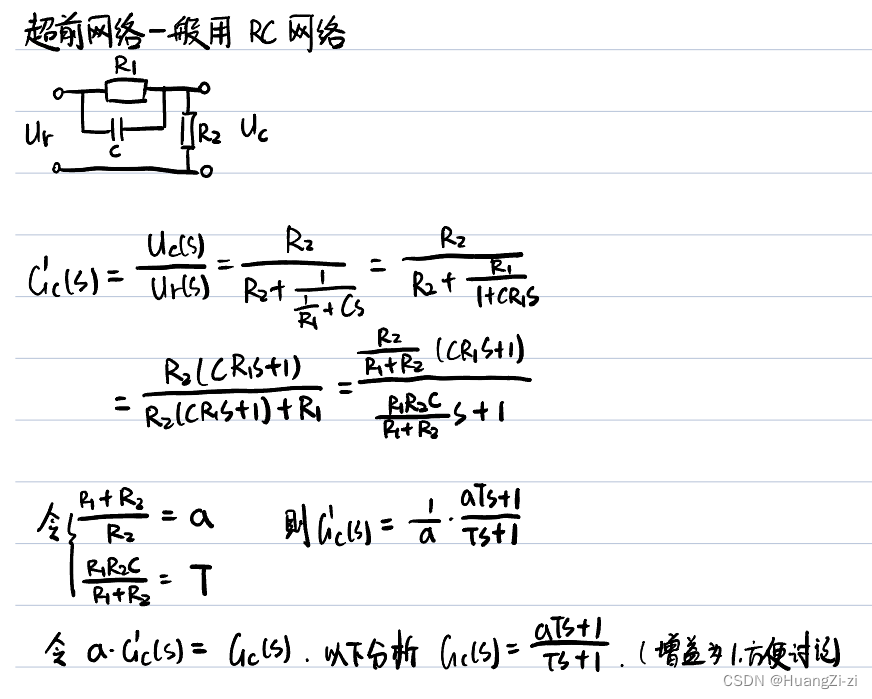
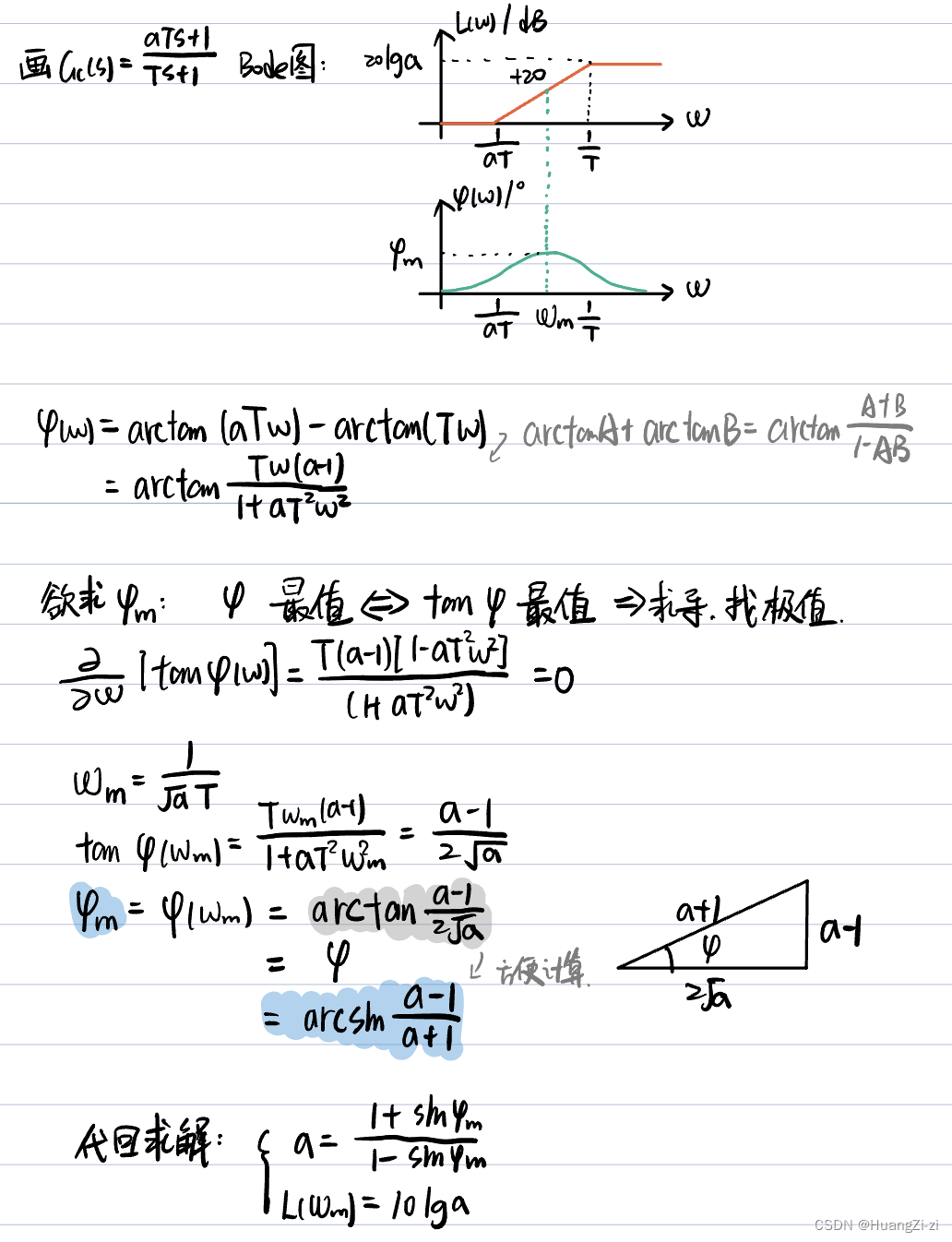
超前网络的典型传递函数: G c ( s ) = a T s + 1 T s + 1 G_c(s)=\displaystyle \frac{aTs+1}{Ts+1} Gc(s)=Ts+1aTs+1,研究其性质:
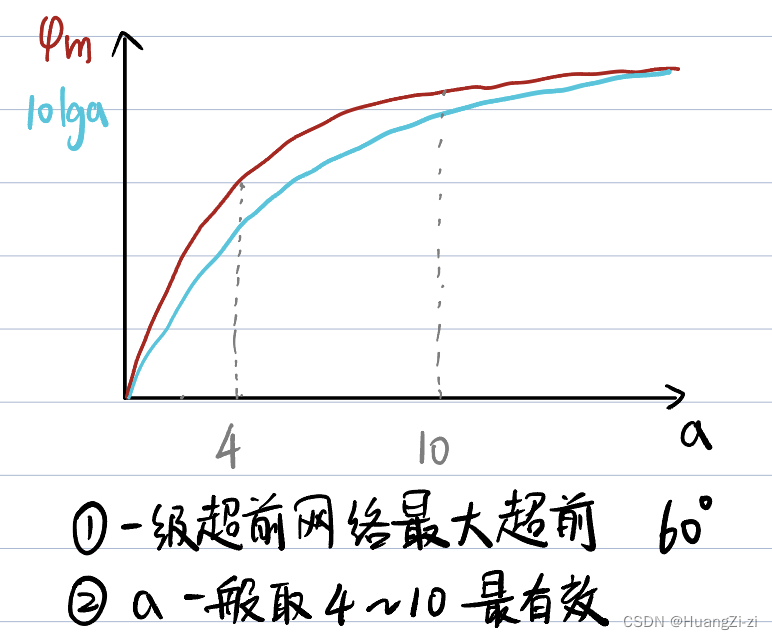
a称为倍频比,反映了两个转折频率之间的频率关系
超前校正方法与例题
期望指标用*表示,如ess*、 γ ∗ \gamma^* γ∗
步骤
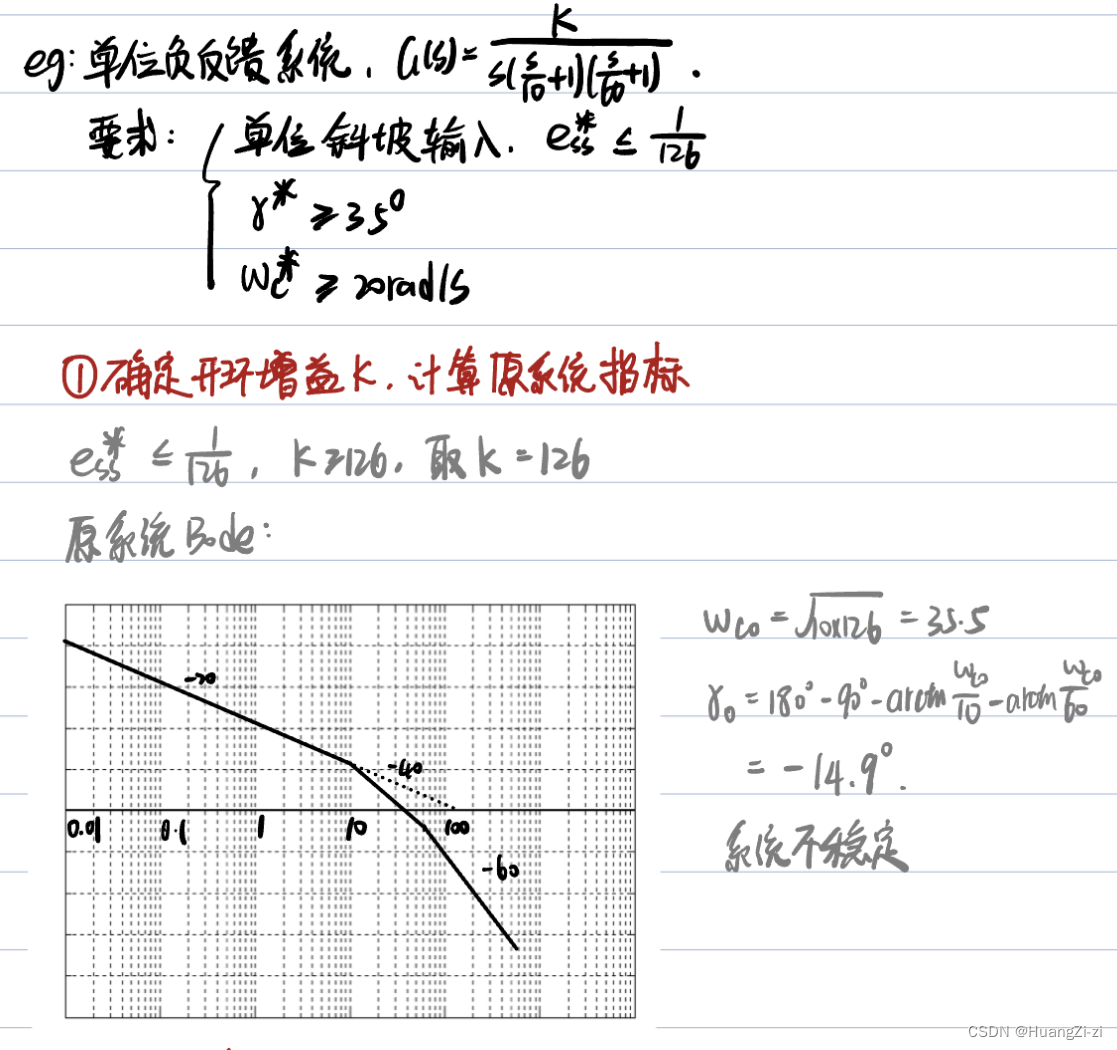
- 由 e s s ∗ e_{ss}^* ess∗确定开环增益K
- 画校正前Bode图,计算剪切频率 ω c 0 、 γ 0 \omega_{c0}、\gamma_0 ωc0、γ0,判断是否满足期望指标。如果 ω c 0 \omega_{c0} ωc0和 γ 0 \gamma_0 γ0都偏小,选用串联超前校正
- 确定补偿量: φ m = γ ∗ − γ 0 + ( 5 ∼ 10 ° ) \varphi_m=\gamma^*-\gamma_0+(5\sim10\degree) φm=γ∗−γ0+(5∼10°),根据补偿量计算: a = 1 + sin φ m 1 − sin φ m a=\displaystyle \frac{1+\sin \varphi_m}{1-\sin \varphi_m} a=1−sinφm1+sinφm,进而计算 10 lg a 10\lg a 10lga
- 做图找A B C D点,描出校正环节的Bode图,写出其传递函数 G C ( s ) G_C(s) GC(s)
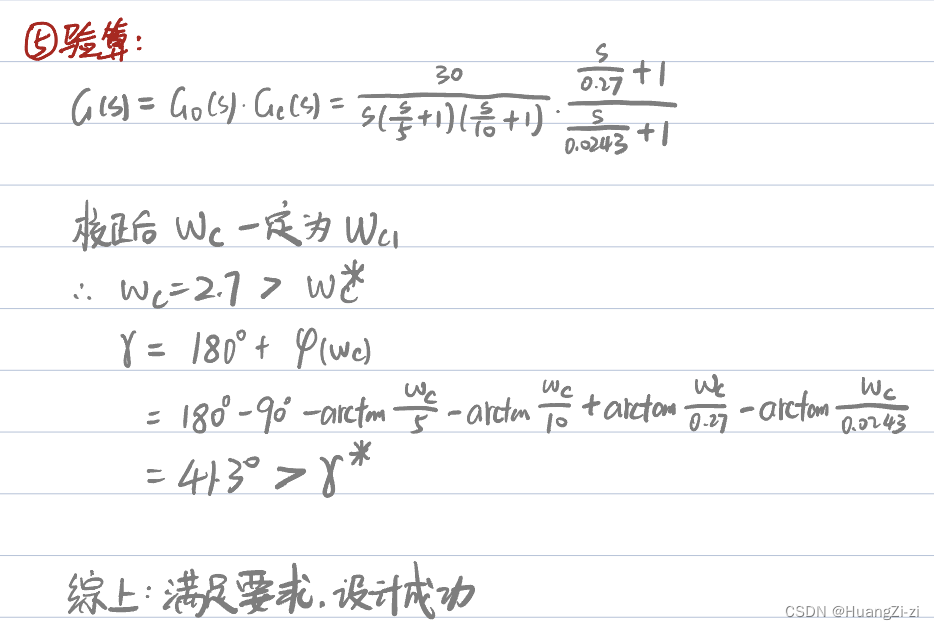
- 验算
里面一些步骤还是比较抽象,所以结合一道例题:
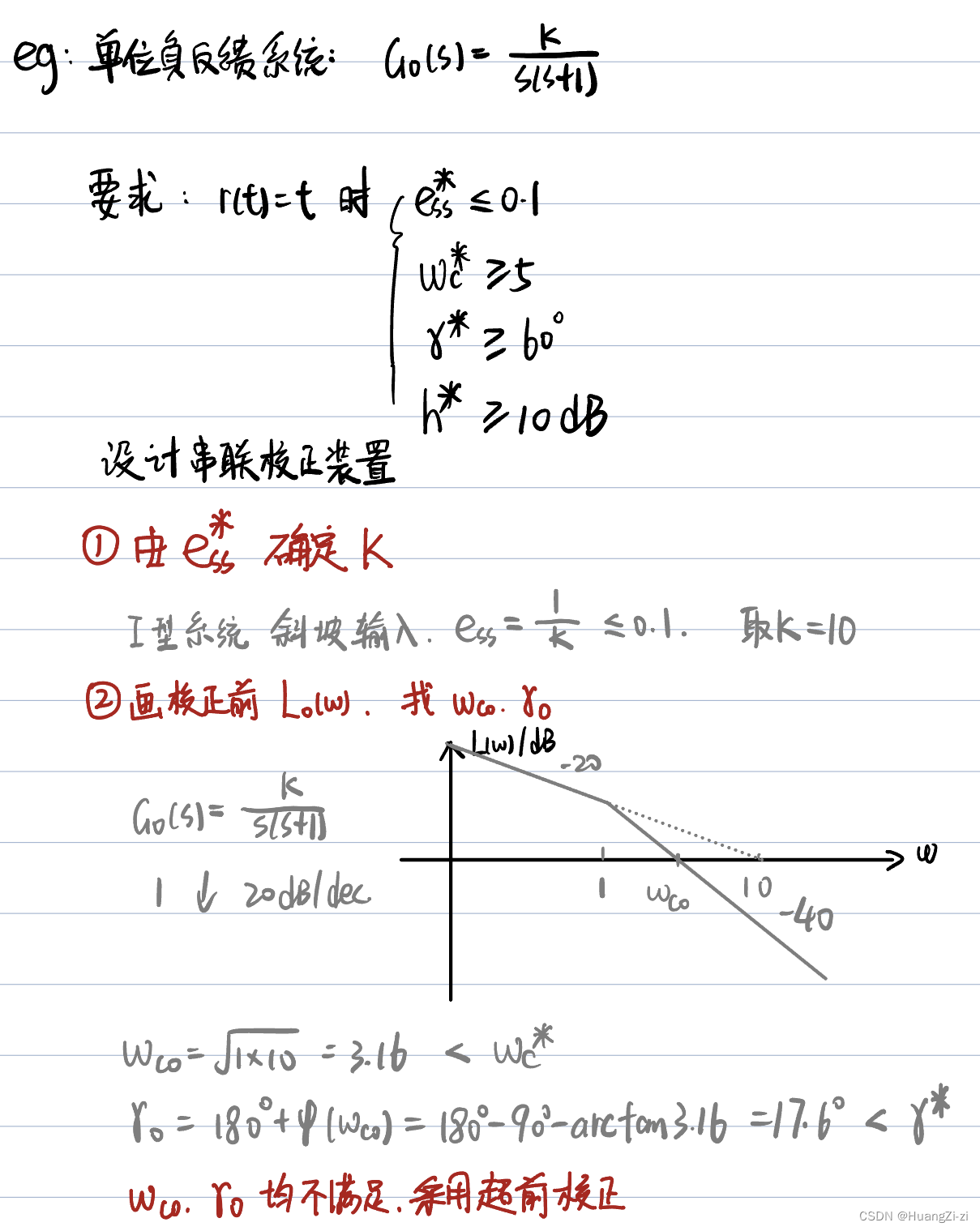
第一步第二步是事先工作,通过确定当前指标与期望指标之间的关系,来选择校正方式。超前校正会使 ω c \omega_c ωc增大,所以对 ω c 0 \omega_{c0} ωc0也有要求,不能太大,要比期望小。
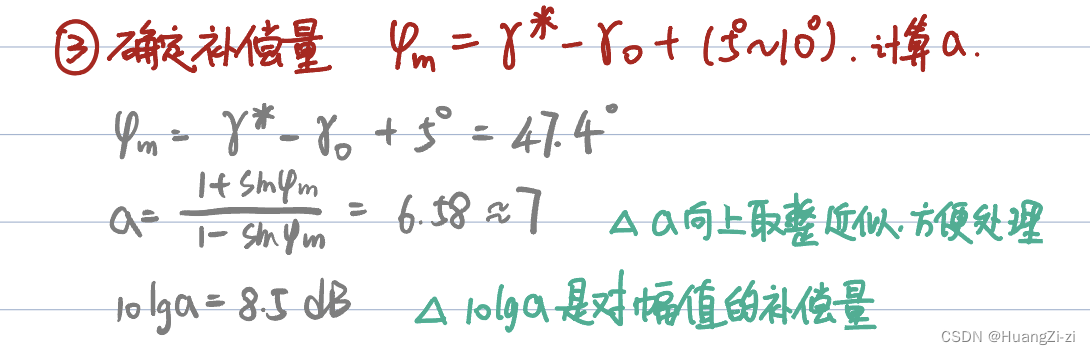
确定补偿量。
这里解释一下为什么在从当前值补偿到期望以外,还要额外补偿 5 ∼ 10 ° 5\sim10\degree 5∼10°
5~10度是一个大概的值,也不需要精确计算。为了留有调整的余地,一般取得比较保守。
回到题目本身:
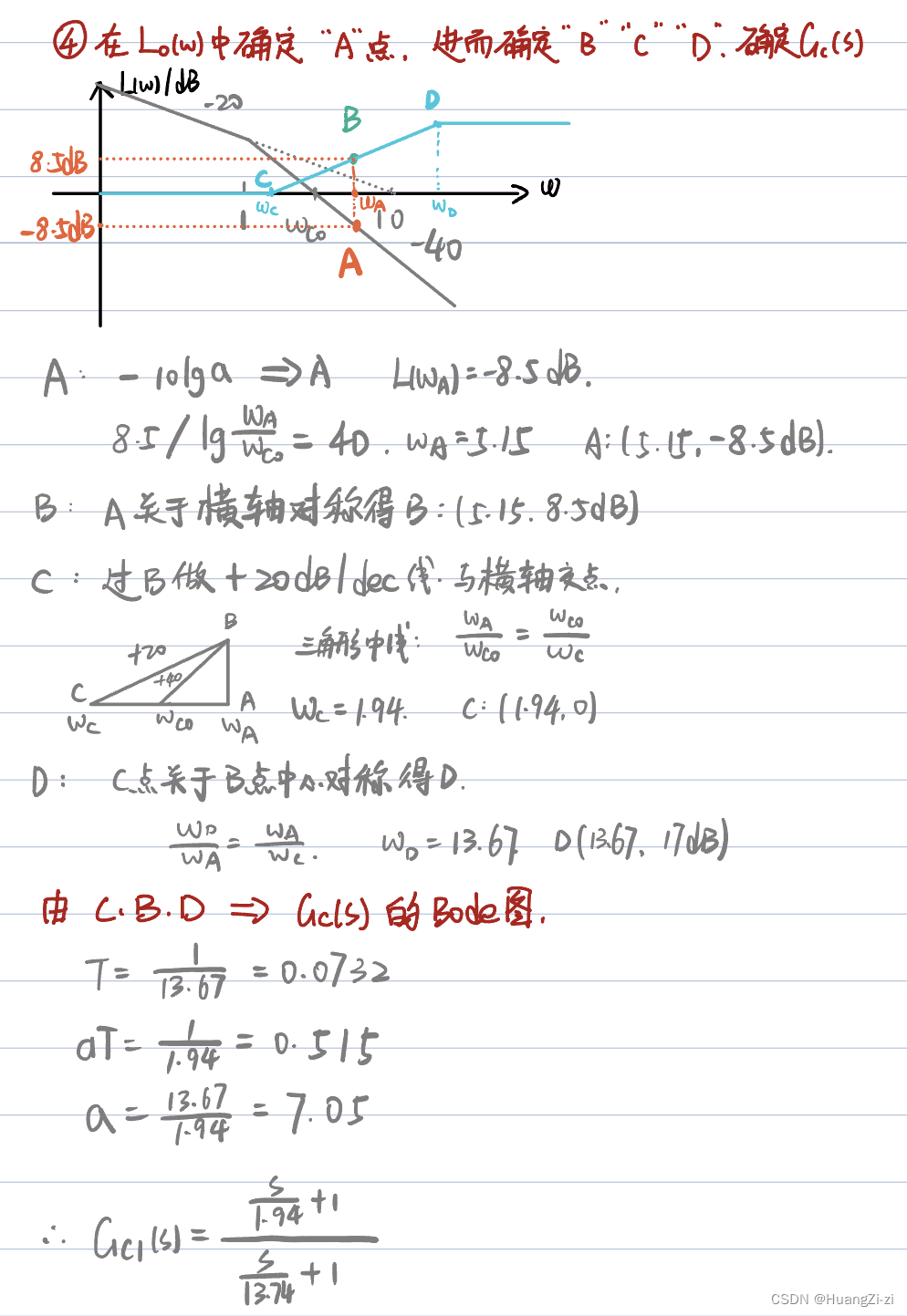
这里ABCD点观察一下图像,还是很好理解的。
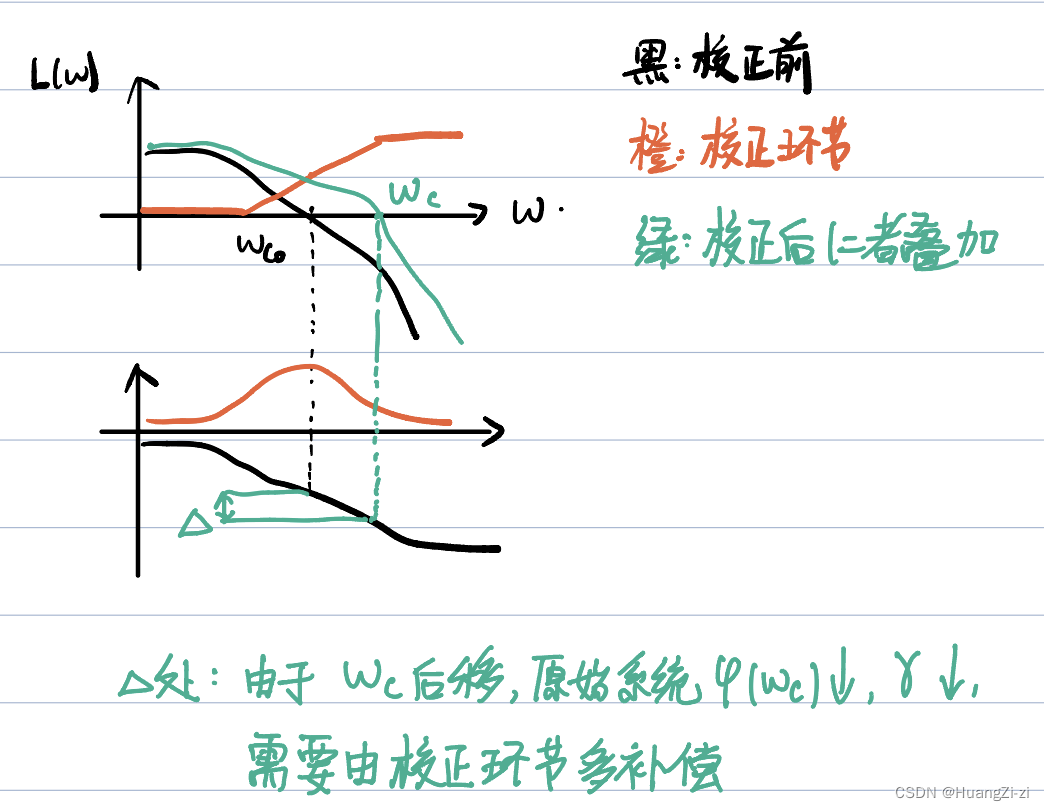
通过相角补偿量可以计算出对应的幅值补偿量。串联校正在Bode图中为加减关系,在原曲线上,扣去补偿量,可以计算出新系统的剪切频率,以这个频率为校正环节相角最大点,画出校正环节Bode图,进而写出传递函数。
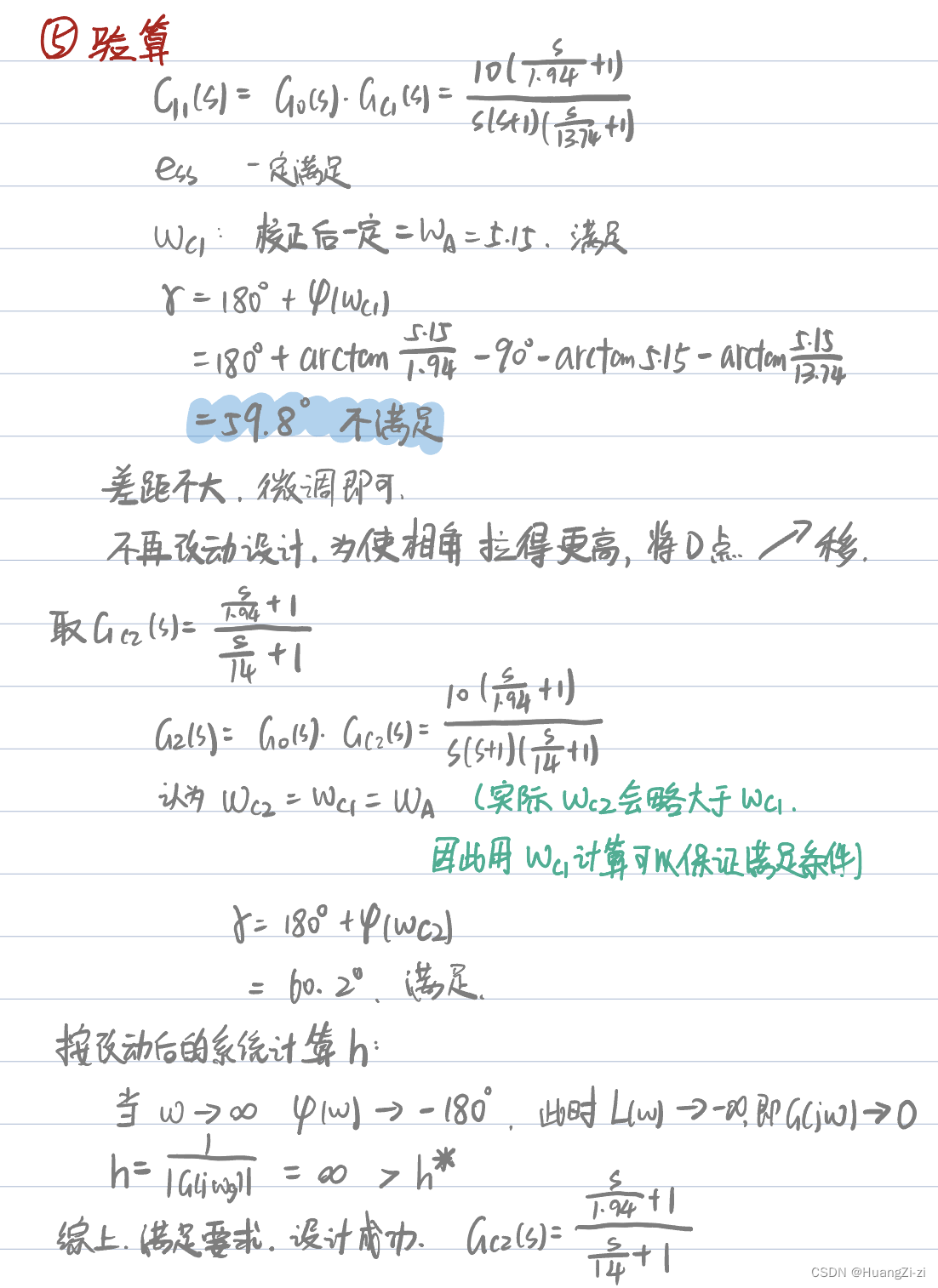
验算还是很必要的。如果误差比较小,可以把D点微调一下,满足条件即可。如果偏差太大,需要重新设计。
校正部分自由度比较高,比如上一道题,也可以按照截止频率进行设计,利用超前环节,将期望截止频率处的幅值补偿为0dB,进行计算。
串联超前校正的结果
低频段:保持不变,满足稳态精度指标
中频段:减缓延宽,改善动态性能
高频段:抬高,抗高频干扰能力下降
串联滞后校正
超前校正是由于校正环节本身带来正的相角,抬高了中频段相频特性,提高稳定裕度。
而滞后校正使用的另外一种机理,发掘出系统本身的相角裕度。
滞后网络特性
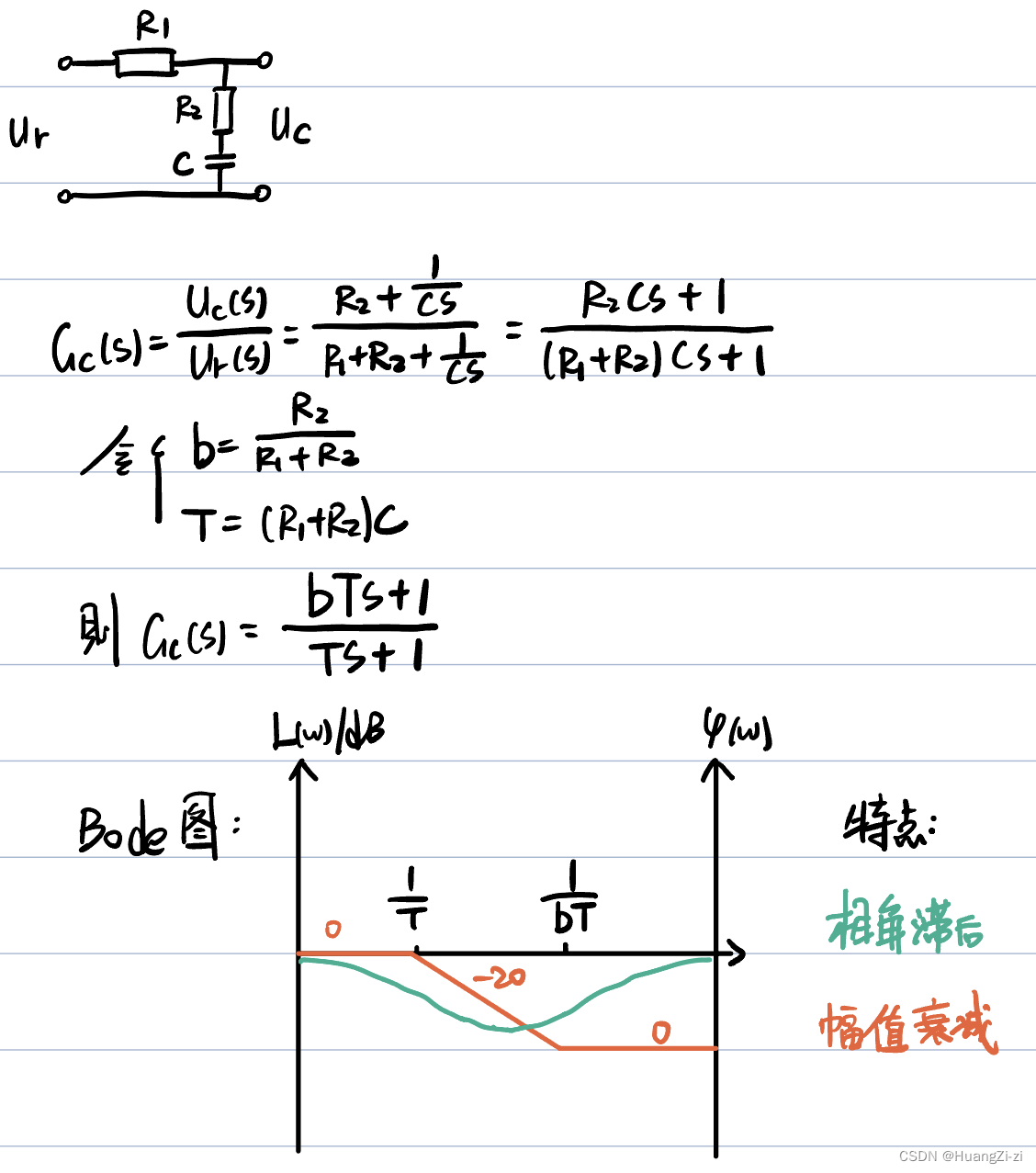
滞后网络主要应用其幅值衰减特性。将幅频曲线下压,使 ω c \omega_c ωc提前,在 φ ( ω ) \varphi(\omega) φ(ω)曲线下降的区间提前 ω \omega ω,可以增大 φ \varphi φ,进而增大相角裕度。
至于相角滞后的特性:
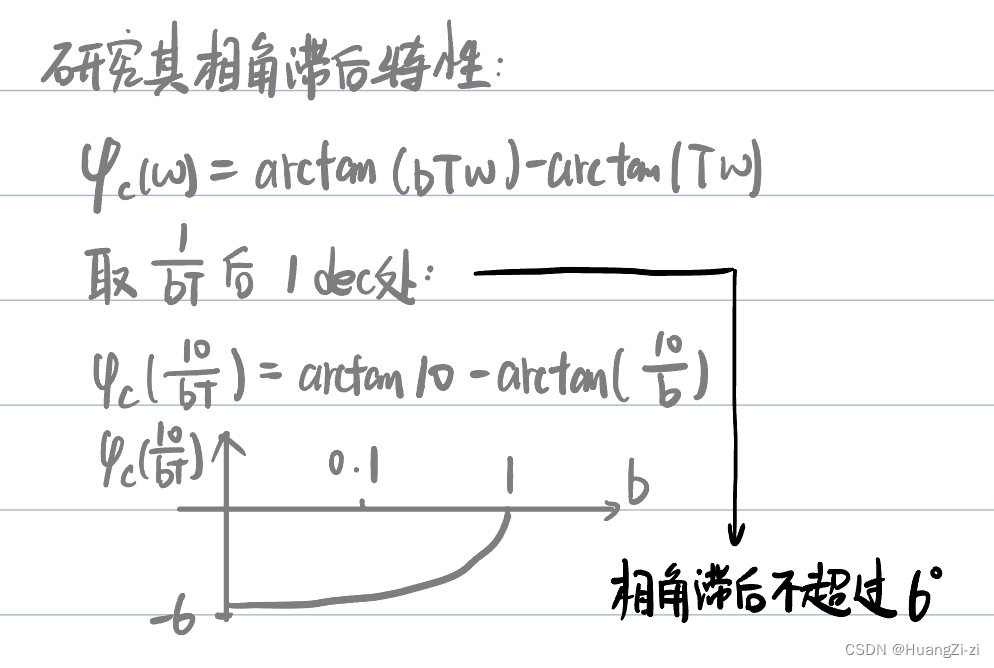
如果 ω c \omega_c ωc取在 1 b T \frac{1}{bT} bT1后十倍频处,可以证明,相角滞后不超过6度,因此在补偿的时候把这六度加上就可以了。
滞后校正方法与例题
步骤
- 由稳态误差等条件计算开环增益K
- 绘制原系统Bode图,计算 ω c 0 、 γ 0 \omega_{c0}、\gamma_0 ωc0、γ0
- 确定目标量 φ c 1 = γ ∗ + 6 ° \varphi_{c1}=\gamma^*+6\degree φc1=γ∗+6°,在原系统Bode图中找出 γ ( ω c 1 ) = φ c 1 \gamma(\omega_{c1})=\varphi_{c1} γ(ωc1)=φc1对应的 ω c 1 \omega_{c1} ωc1
- 做图找A B C D点,求出校正装置传递函数
- 验算
例题
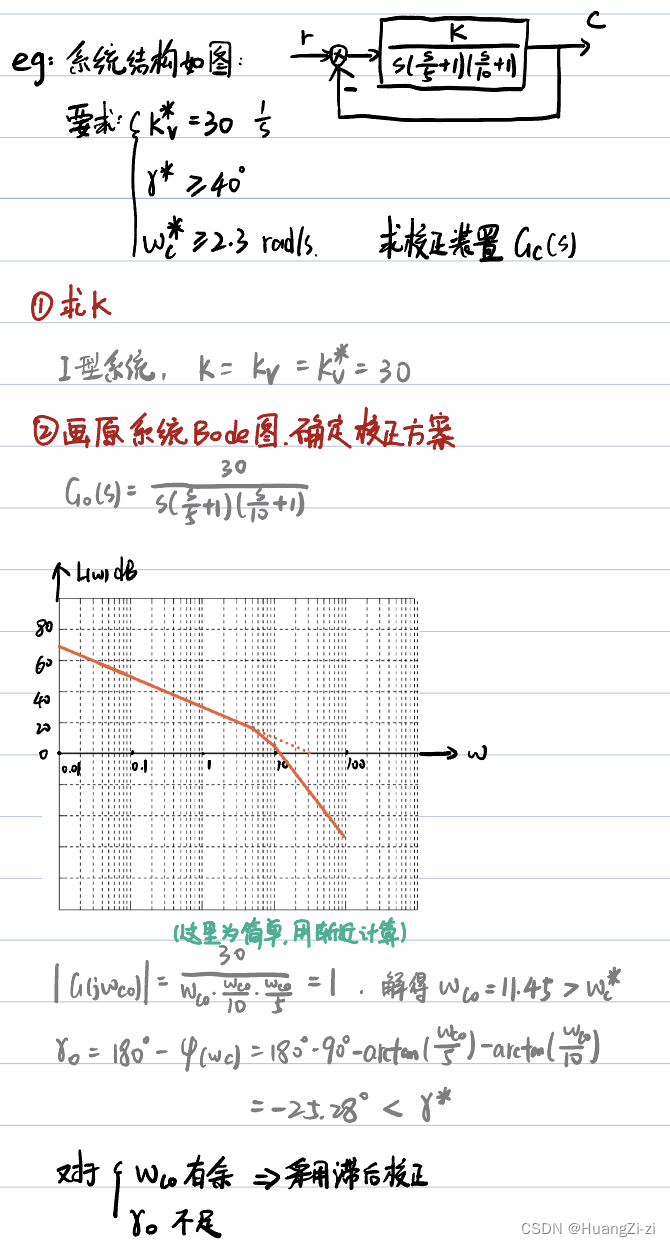
同样的第一步第二步都是先行工作。对于 ω c \omega_c ωc有余而 γ \gamma γ不足的系统,一般选用滞后校正,因为滞后校正会牺牲 ω c \omega_c ωc换取 γ \gamma γ。
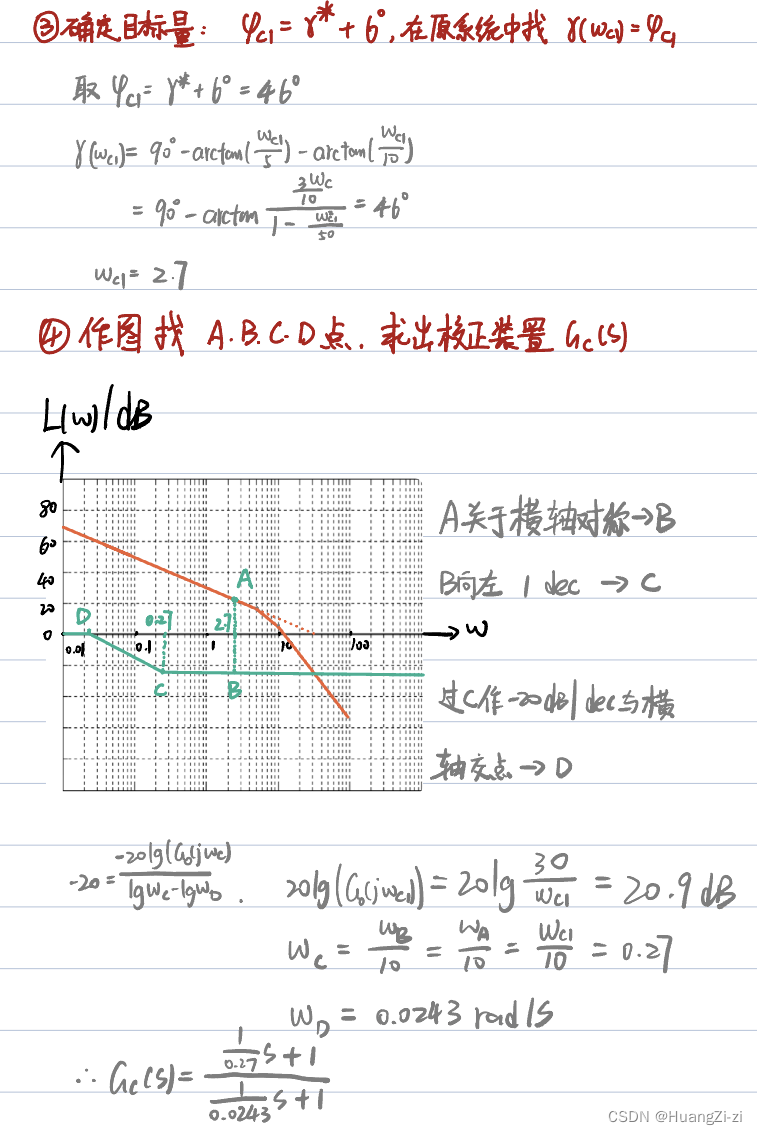
滞后校正的核心在于,在原系统找一个点,使得这个点的相角裕度,减去校正系统的6度偏差之后,刚好能够满足预期要求。通过滞后网络,使得这个点刚好成为校正后的 ω c \omega_c ωc,即使有6度偏差。其相角裕度也一定满足要求。
为了避免偏差大于6度造成校正失败,取C点一般距离B点10倍频以上。不过在工程中一般要求不严格,取5-10倍都可以。
滞后校正效果
低频段保持,满足稳态精度
中频段压低,减小 ω c \omega_c ωc,提高 γ \gamma γ,损失快速性,改善稳定性
高频段拉低,提高抗高频干扰的能力
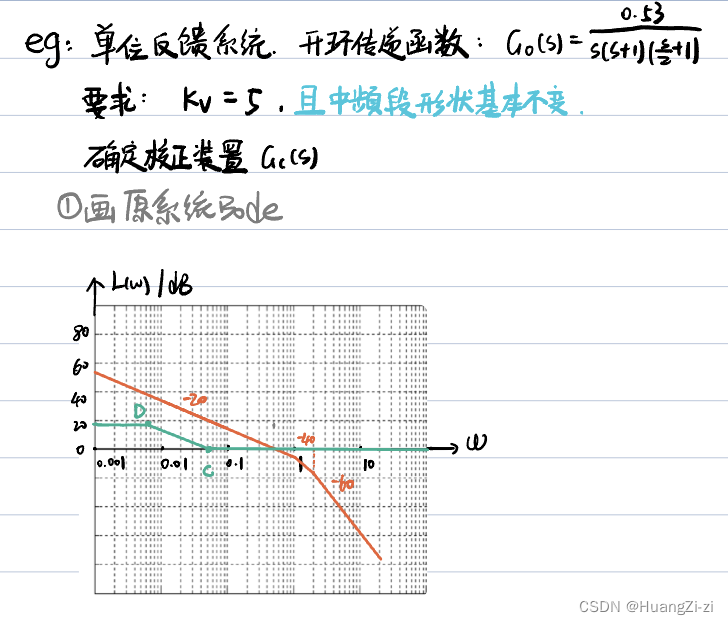
滞后校正的另一种用途
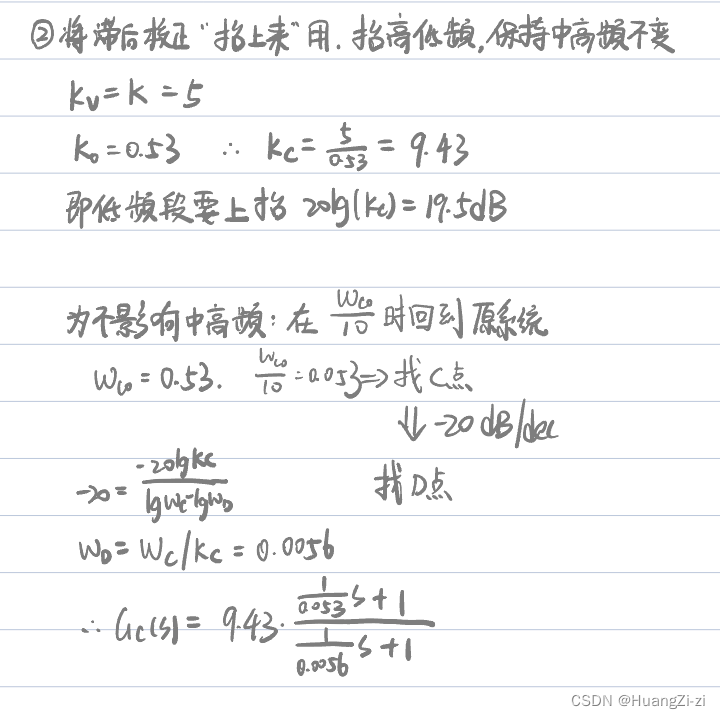
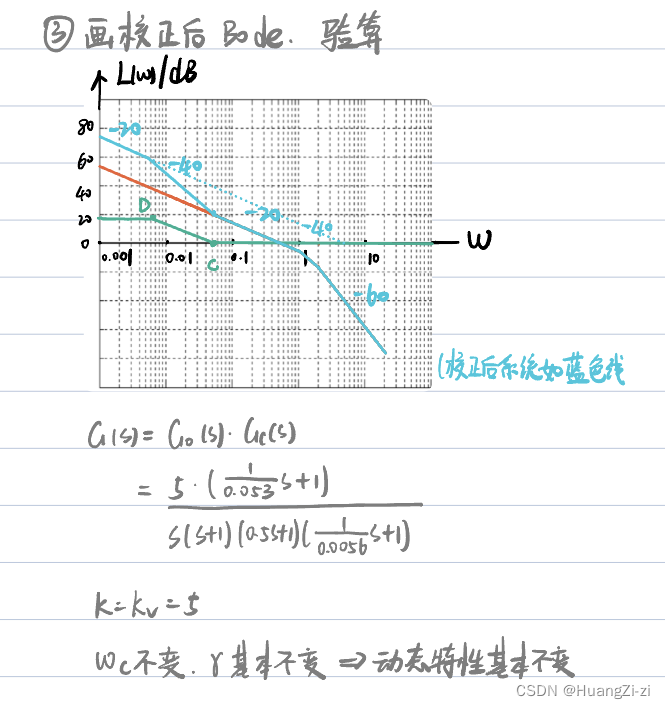
把滞后网络整体乘以一个系数,就会变成抬高低频段,中频段基本不变,高频段无影响,可以解决有稳态误差需要的问题。
串连滞后-超前校正
就是把前面两个校正方法结合起来。
因为超前校正有60度的能力限制,如果补偿角度接近或者超过60度就无能为力了。而滞后校正取决于系统自身的相角裕度储备,有可能在理想的截止频率处,无法得到足够的相角裕度,所以需要把两种方法结合起来,挖掘一部分相角储备,再补偿一部分相角,最终达成目标。
滞后-超前网络特性
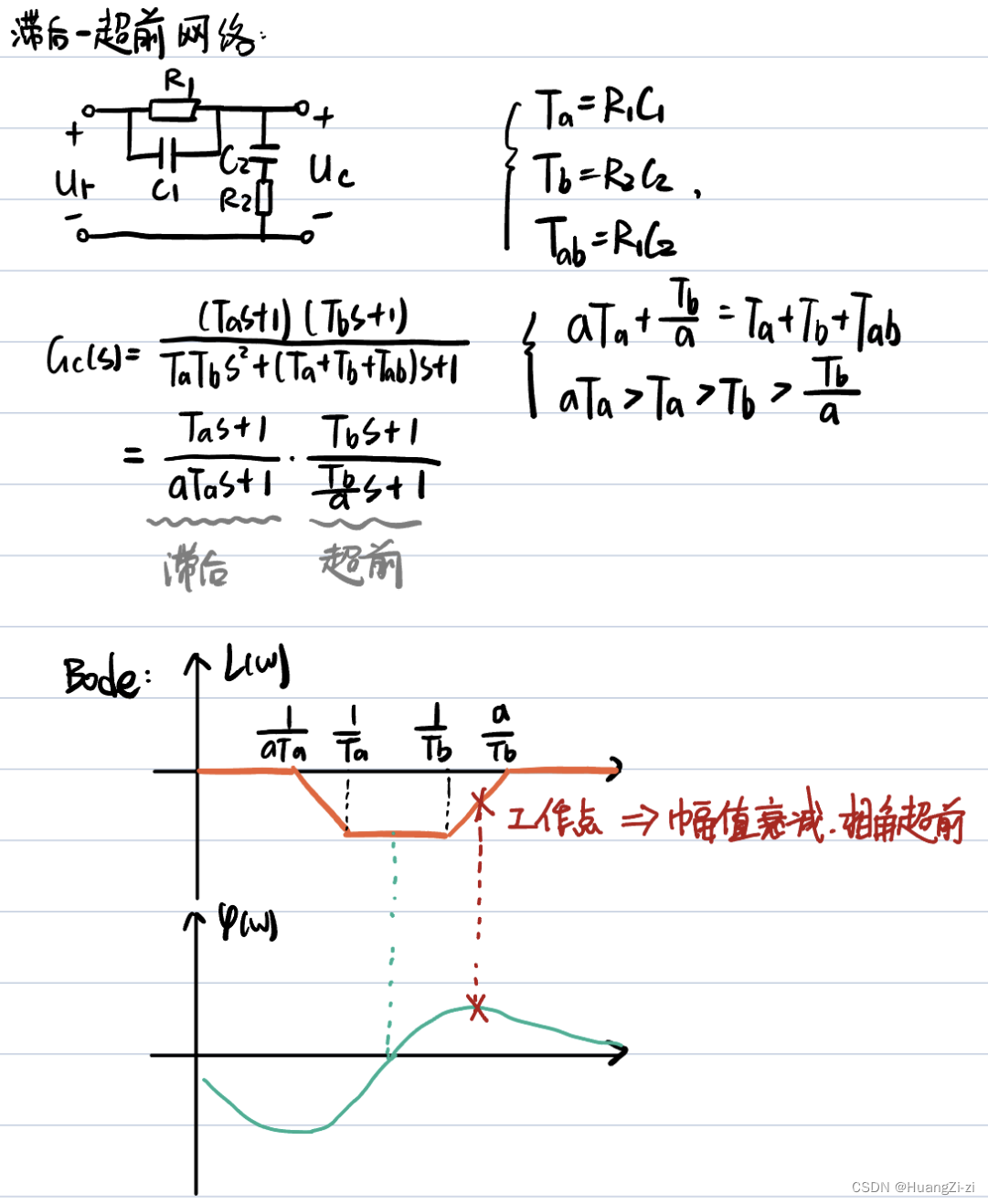
相当于滞后环节和超前环节相串联。
设计的时候,先按照超前网络设计,再叠加滞后网络。一般超前网络需要按照截止频率设计,与之前超前校正按照补偿角度设计略有不同。
整体来说,在工作点处,系统幅值衰减,相角超前。
滞后-超前校正方法与例题
步骤
- 根据稳态误差要求,求K,并确定校正方案
- 确定超前部分
- 确定滞后部分
- 验算
例题
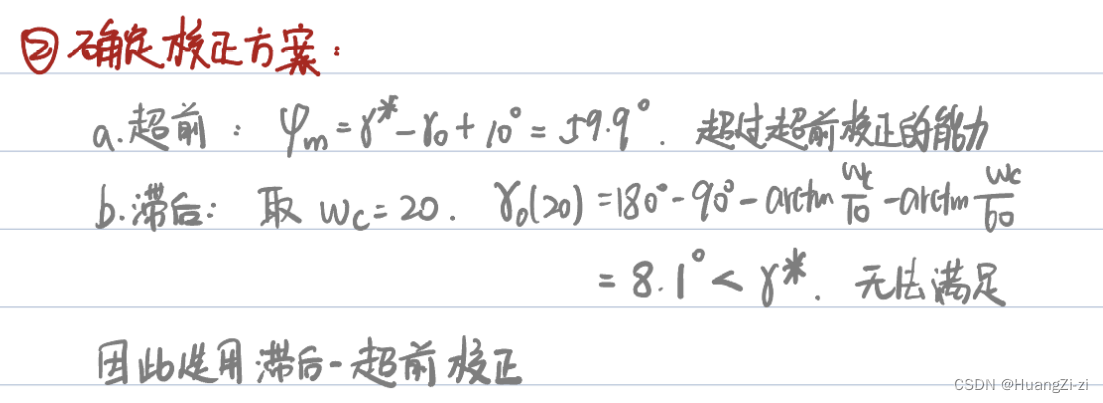
这里也是通用步骤。发现单独用超前和校正都解决不了问题,所以两者结合使用。
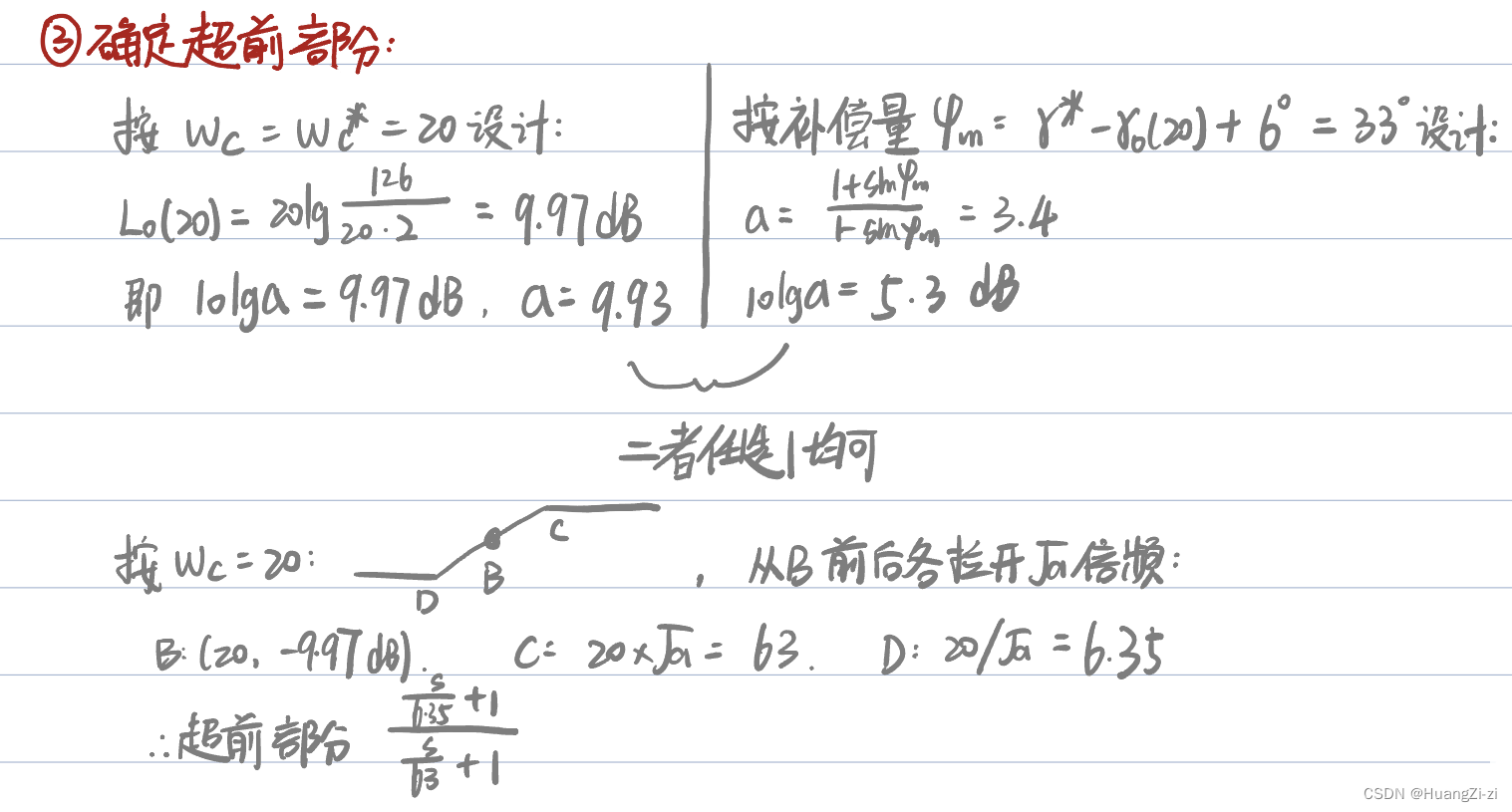
这道题给出了理想的截止频率,所以直接按照截止频率设计,即刚好在理想截止频率处将原系统幅值补偿到1。
一般来说这样补偿的相角是超过补偿量的。
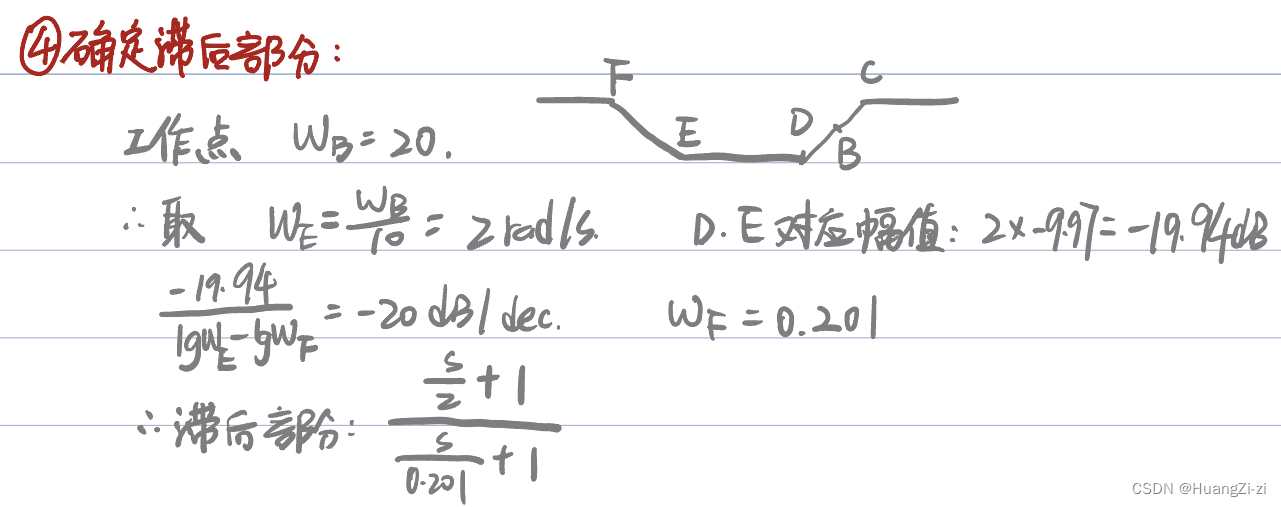
滞后部分不太讲究。因为超前部分留足了余量,所以按照工作点向左十倍频直接设计就可以了。
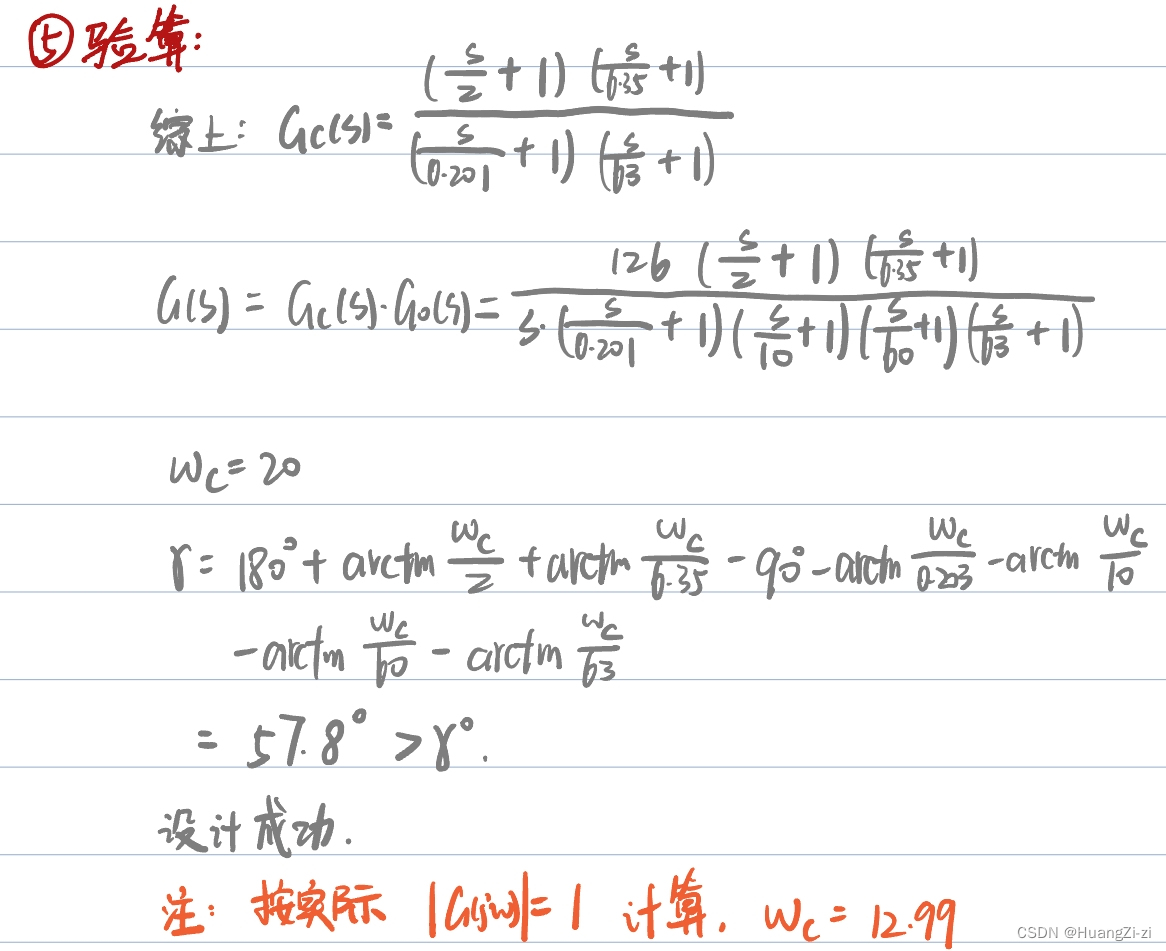
截止频率按照渐近幅频特性来就可以了,算实际值一般还是有不小偏差的。
按照补偿量设计
如果卡着补偿量来补偿相角,又要求截止频率一定,就需要把超前环节整体上下移动来保证理想截止频率
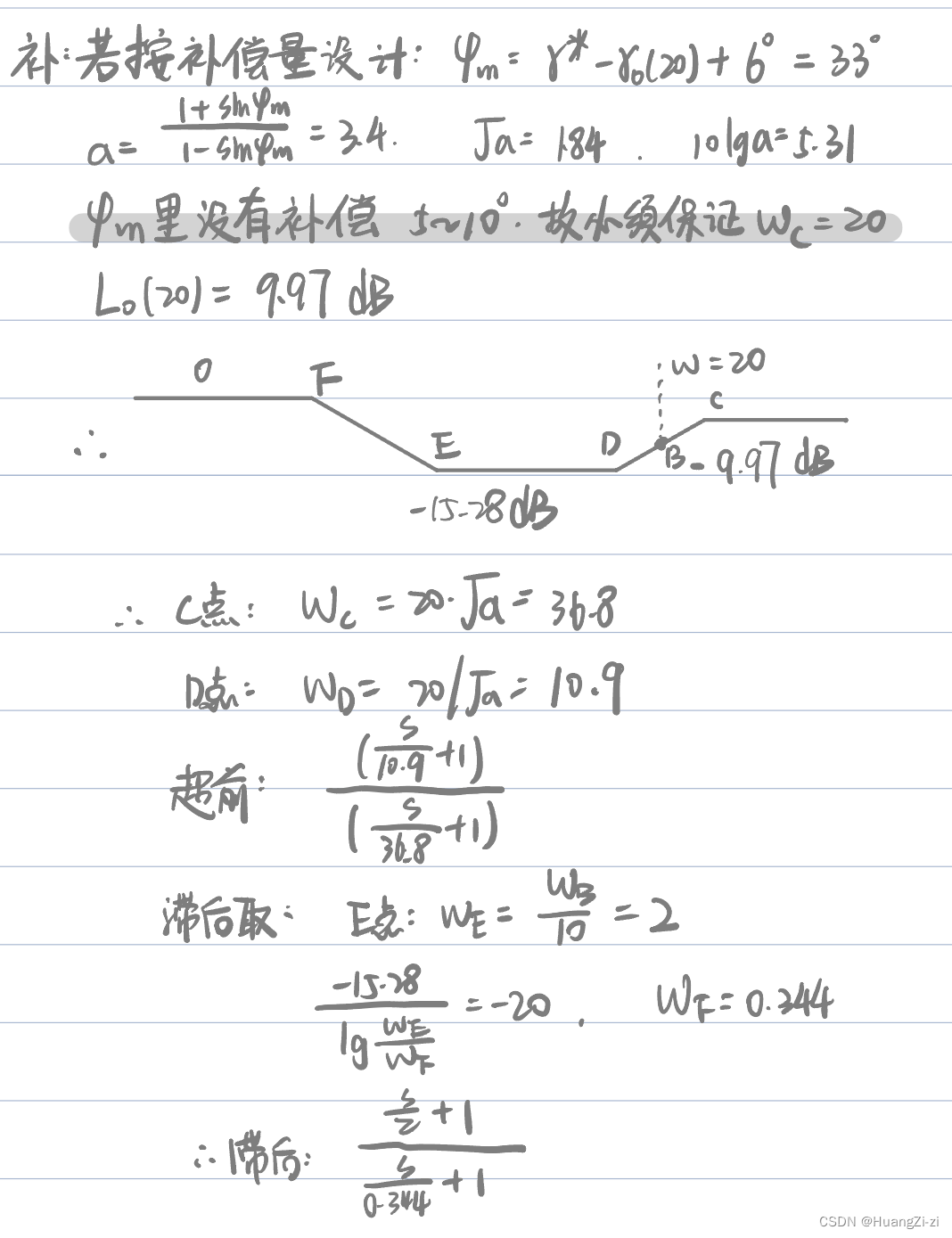
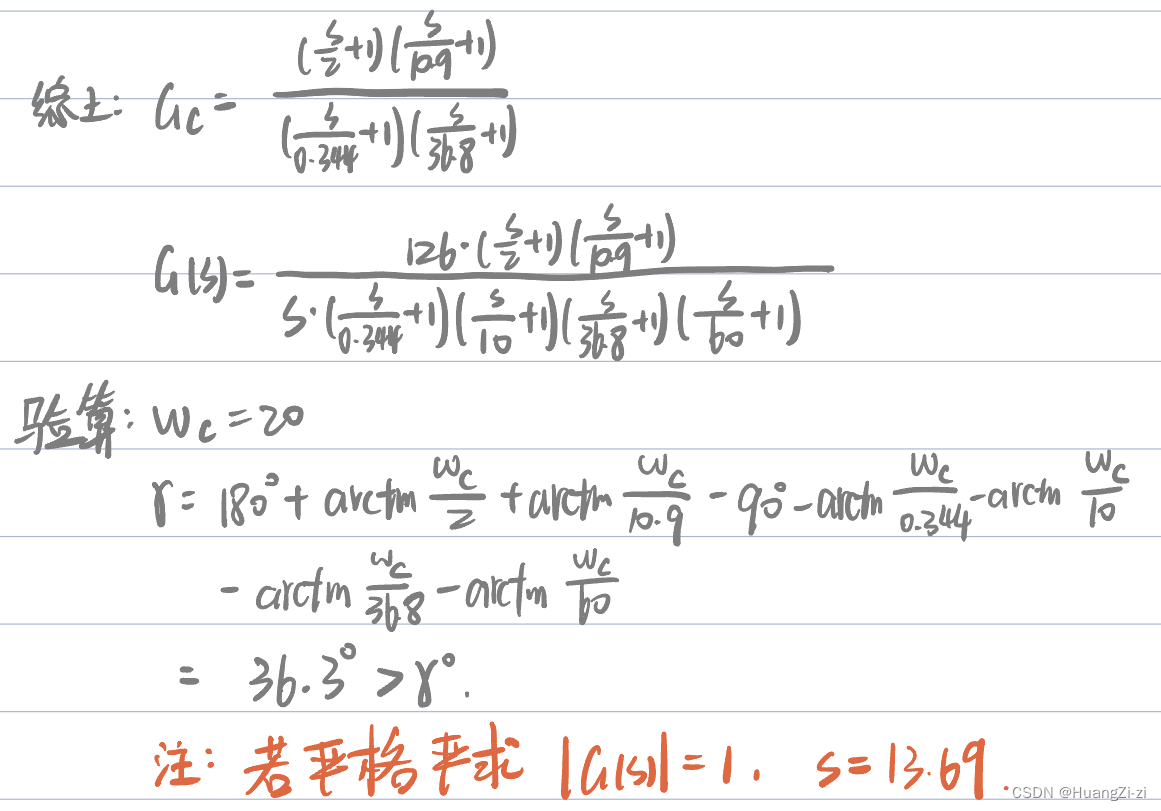
按照相角补偿设计相对保守一些。不过整体结果也大差不差的。
串联PID校正
大名鼎鼎的PID还是来了。PID是经过实践证明的广泛有效可以提升体统稳定性提高系统动态性能的方法,但是到底为什么可以,目前还没有结论。所以这里也不分析理论,只讲用法。
PID网络
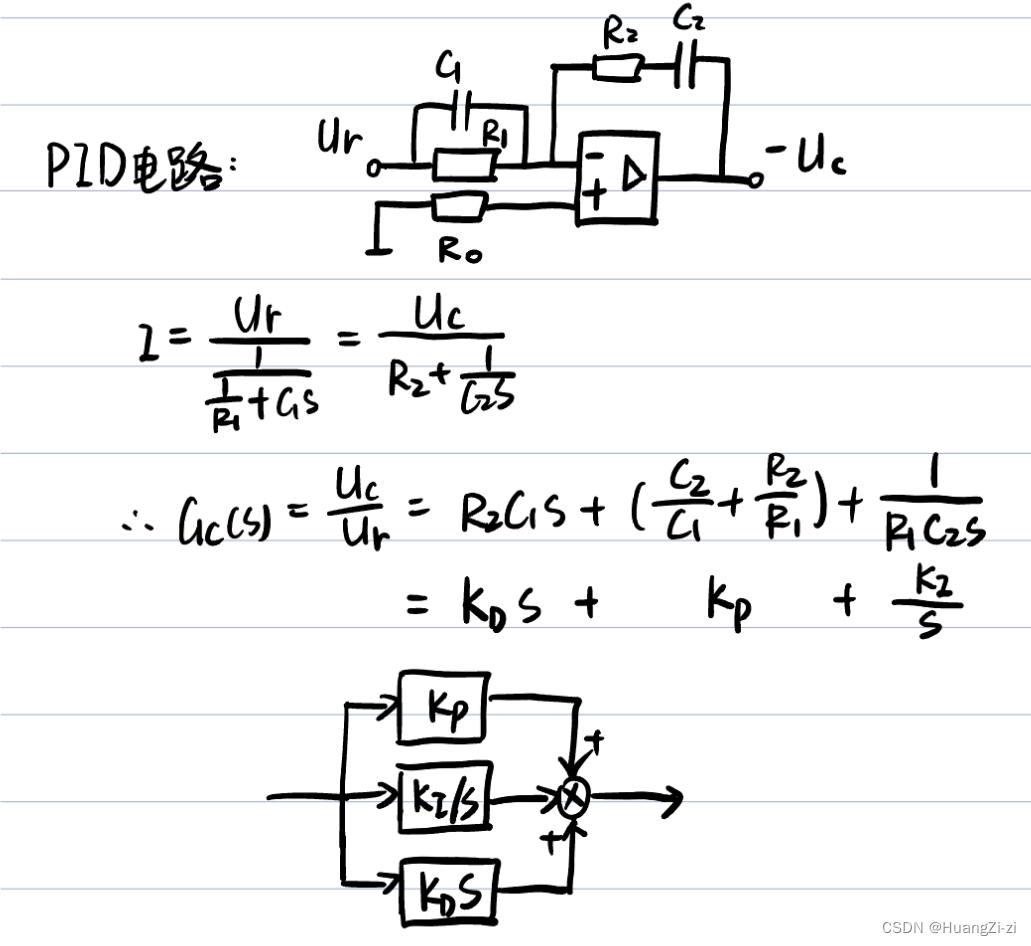
PID网络就是比例-积分-微分三个环节相并联。
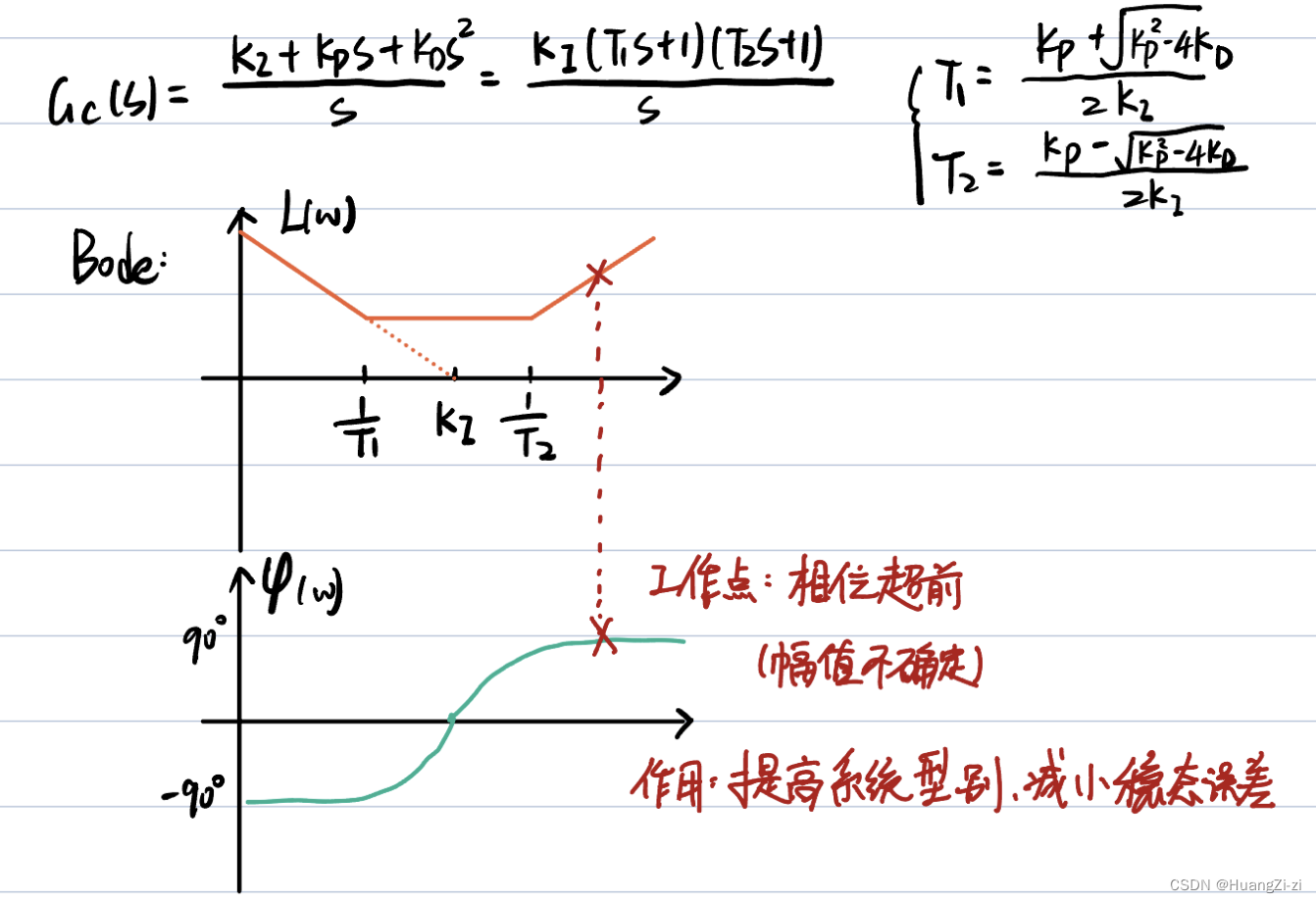
单独说PID网络的时候,开环增益不一定是1,所以在工作点处到底幅值增大还是减小需要依情况而定。不过一般来说工作点是在相位超前处的。
可以把PID看成一种特殊的滞后-超前
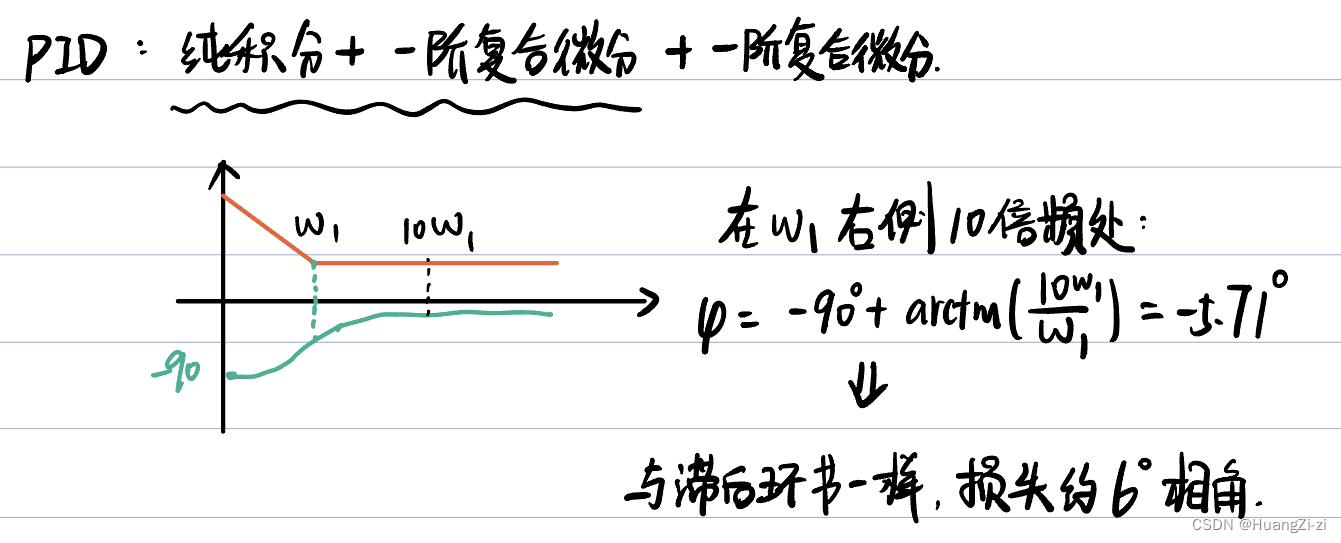
如果只看前面两个环节:结论和滞后环节是一样的,即在工作点处损失不超过6度相角。
PID校正方法与例题
使用PID校正,一般有两种情况:
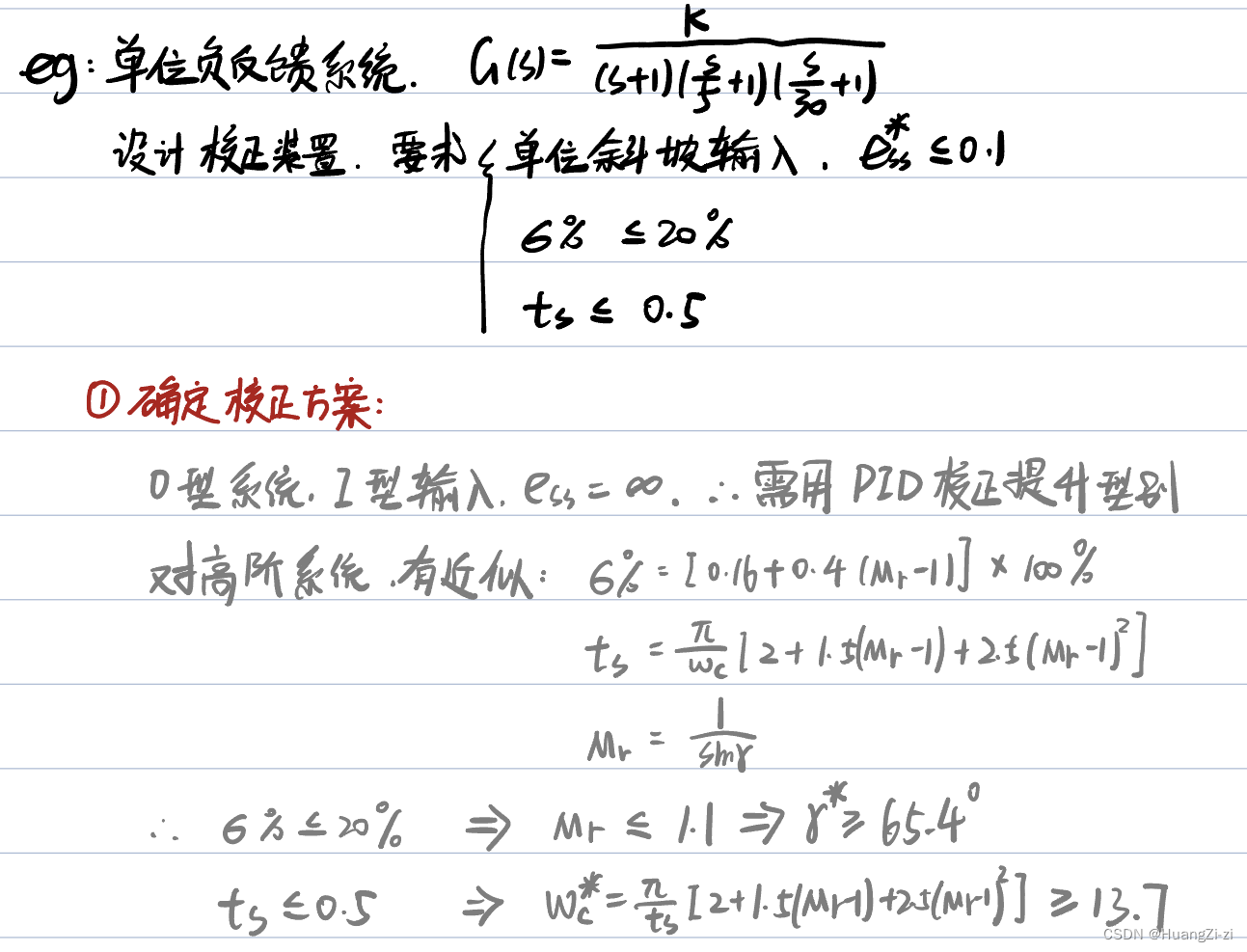
- 系统型别不够,需要PID校正增加一个型别
- 相角超前大于60度而小于90度,超过超前校正能力而可以应用PID校正
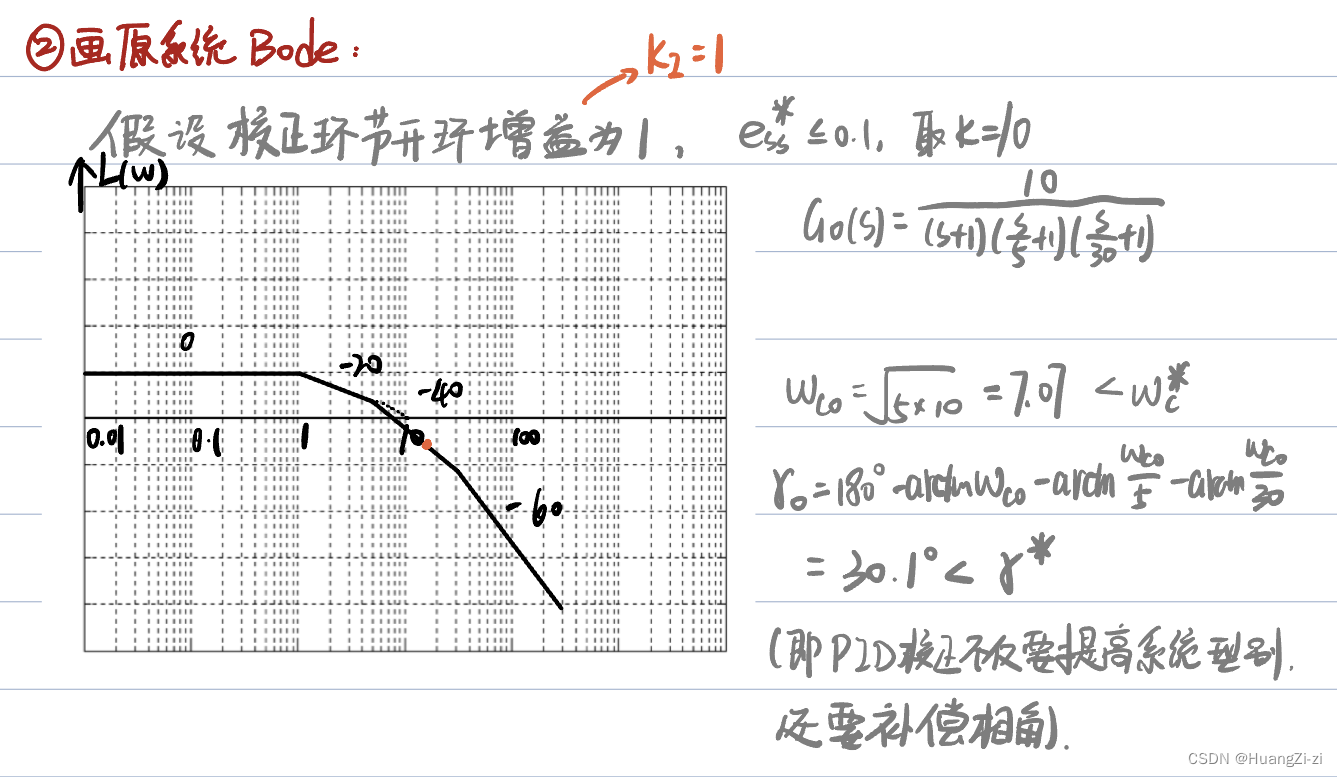
这里有一个讨巧的做法,假设校正环节开环增益=1,这样就摆脱了PID网络 K I K_I KI的影响,跟其他串联校正达成统一。
这里需要补一个型别才能满足稳态误差的需求,在确定开环增益的时候我们假设已经补上了这个系统型别这样确定K
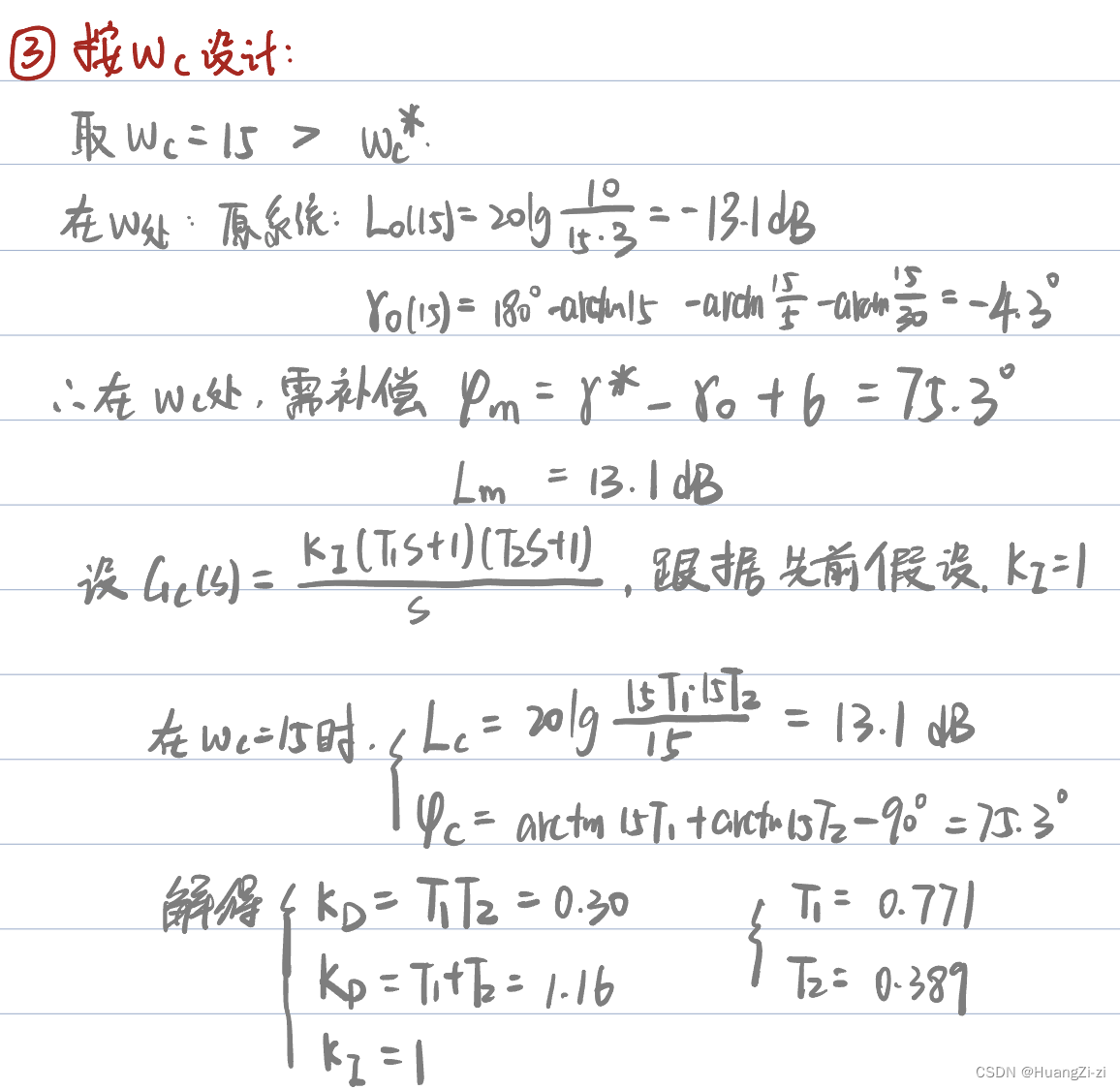
先找出理想的截止频率,然后对这这个点进行补偿,把幅值补偿到1,把相角补偿到满足稳定裕度要求+损失。这样就可以知道工作点处校正环节的幅值和相角
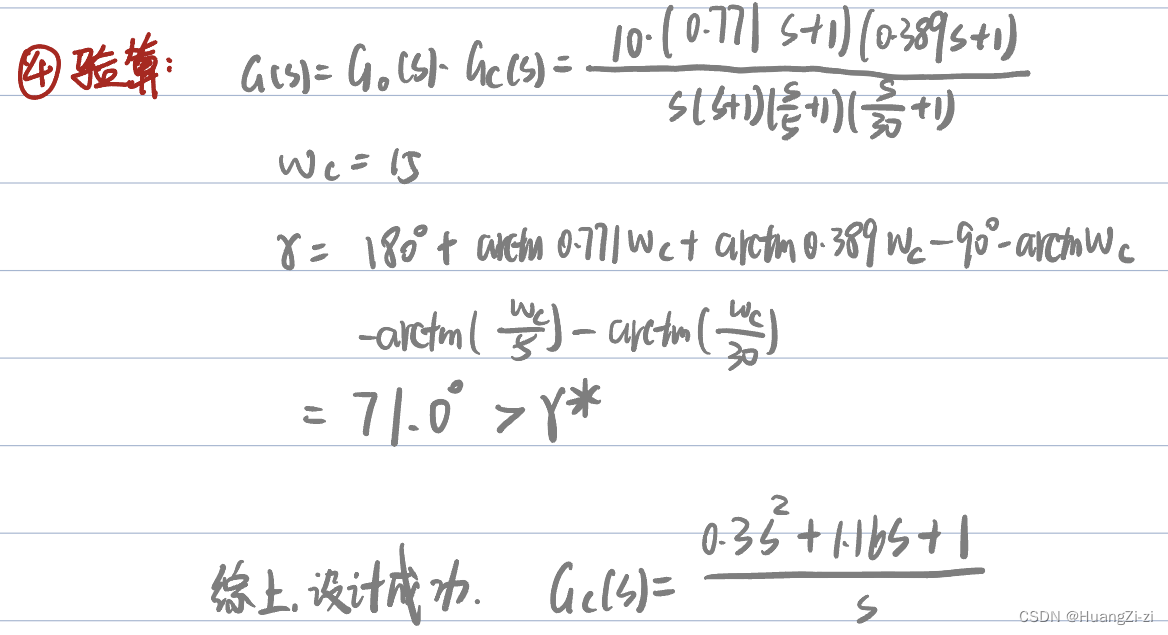
两个方程两个未知数就可以求解了。
频域法反馈校正
反馈校正就是指加一个反馈通道,改变系统传递函数,使系统性能满足要求。采用反馈校正,除了可以达到与串连校正相同的效果,还可以赋予系统一些有利于改善动态性能的特殊功能。
反馈校正的作用
-
改变局部结构和参数
-
位置反馈
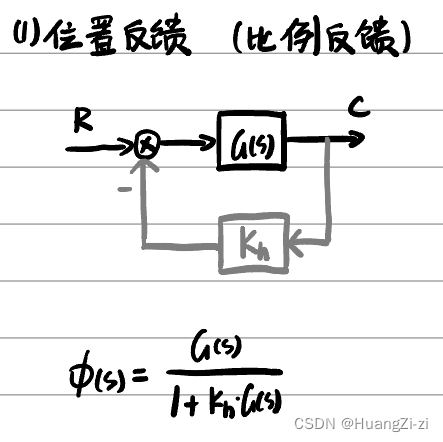
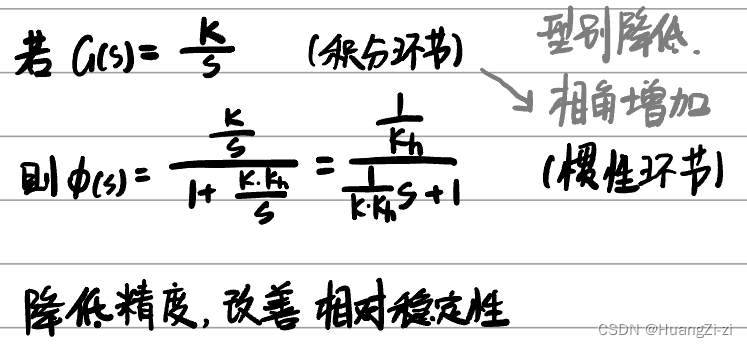
积分环节加位置反馈,降低精度改善稳定性
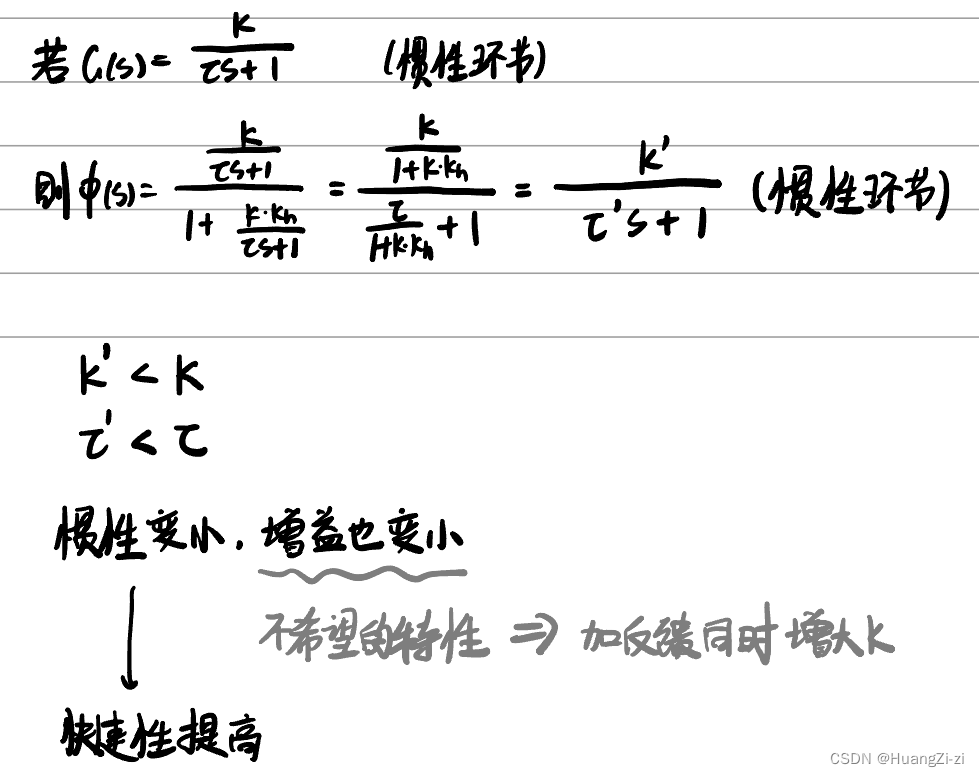
惯性环节加位置反馈,减小增益提升快速性 -
速度反馈
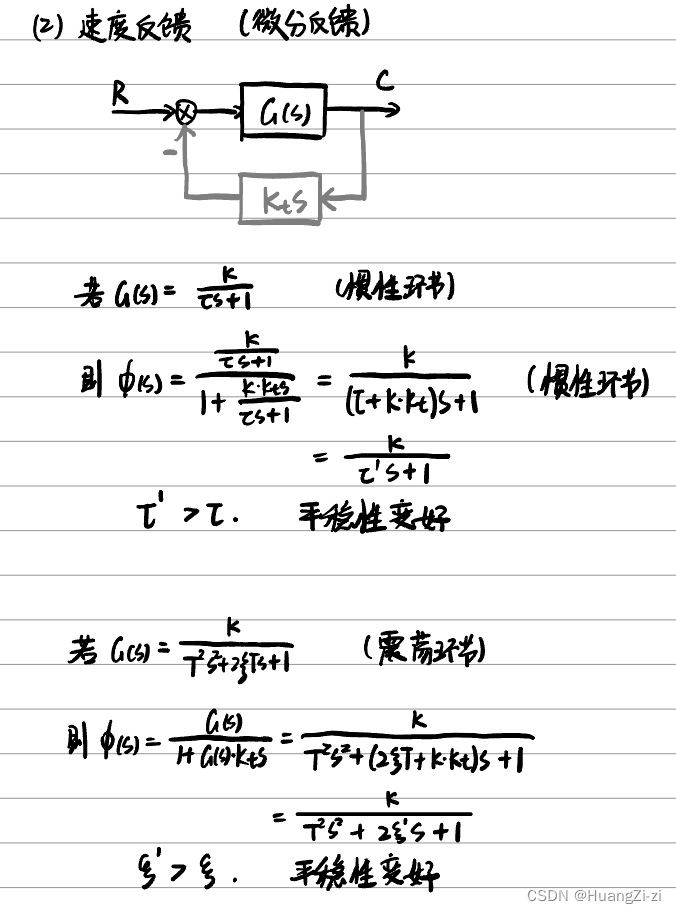
惯性环节加速度反馈,惯性时间常数增大,变化更平稳。
震荡环节加速度反馈,阻尼比显著增大,平稳性变好。
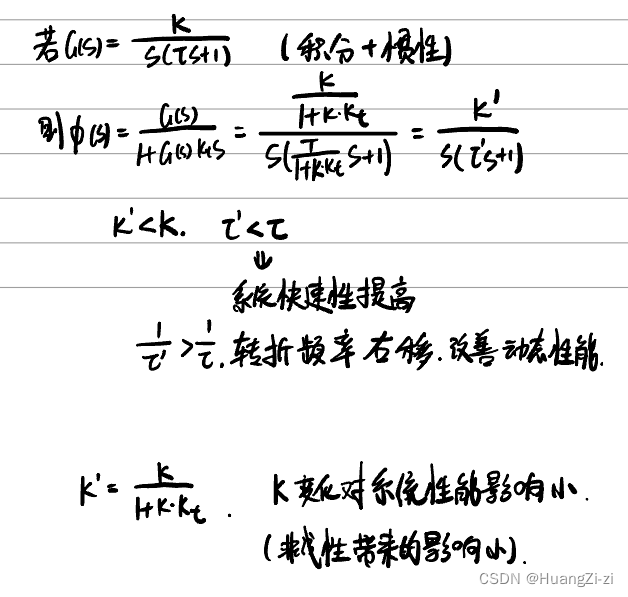
而积分+惯性环节加速度反馈,系统快速性提升,动态性能改善。
-
以上可以看出,不同的环节加反馈校正,结果是不一样的。所以第一是遇到具体系统要具体分析,第二是设计系统的时候要注意认真选择方案。
- 取代局部结构
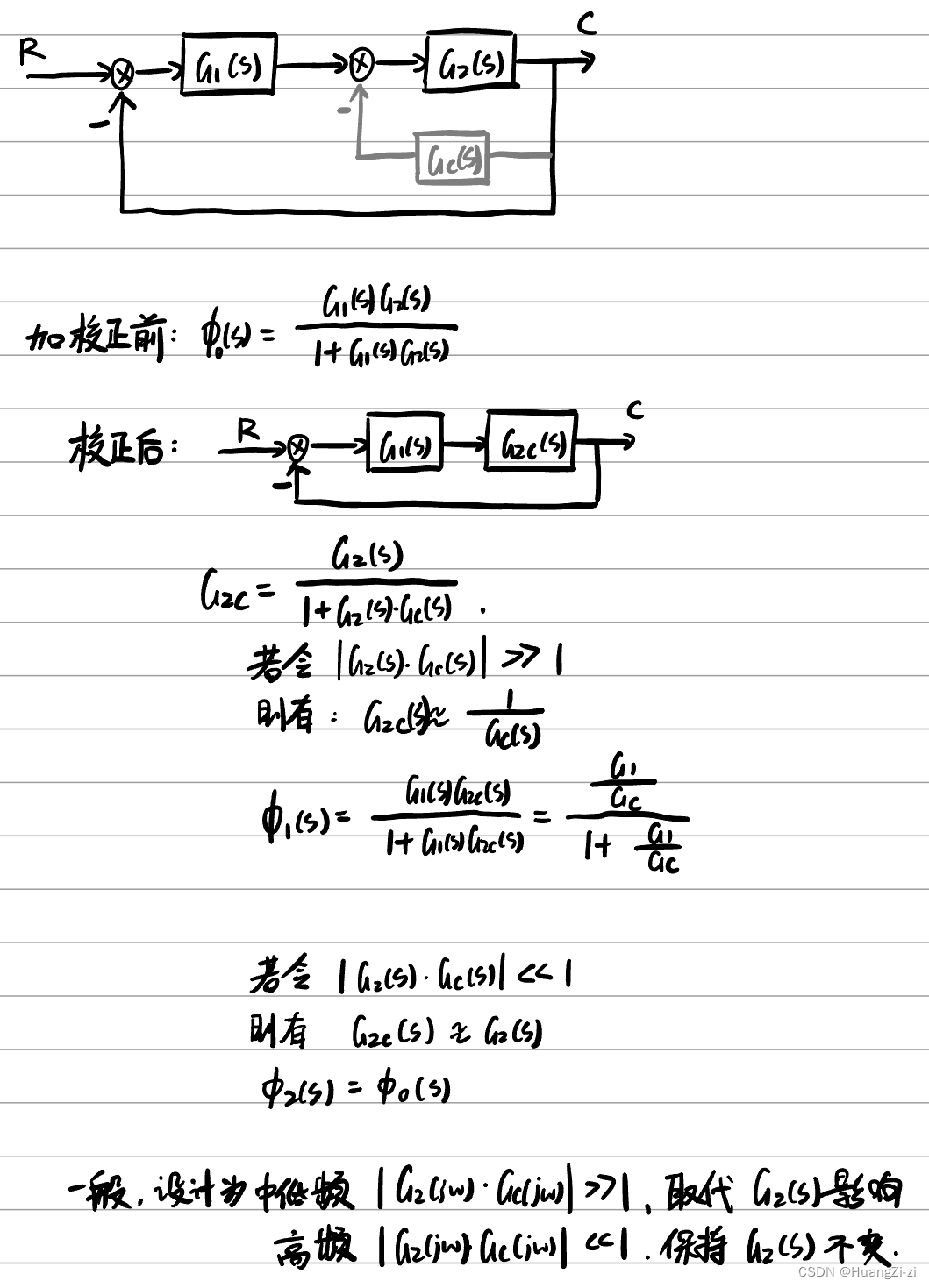
反馈校正可以取代其包围部分的影响,因此可以消除局部环节不期望的特性。
反馈校正装置的设计
这里主要介绍综合法,即期望特性法,这样就可以规避同一反馈通道包围不同环节而效果不同的问题。(这个方法也可以应用在串连校正中,设计出期望特性,然后把原系统的环节扣去,剩下就是串连校正环节了,步骤和反馈校正基本一致,)
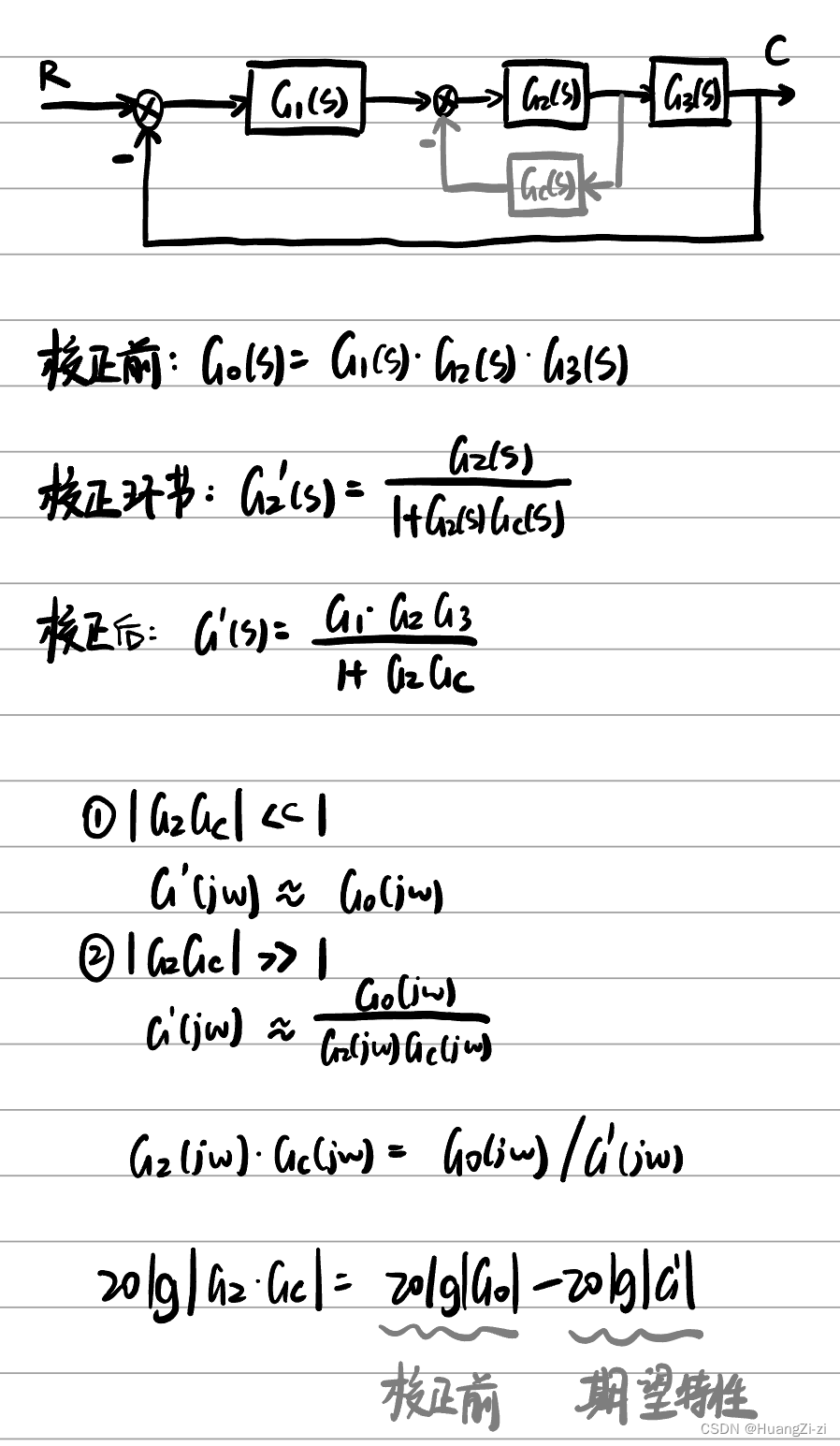
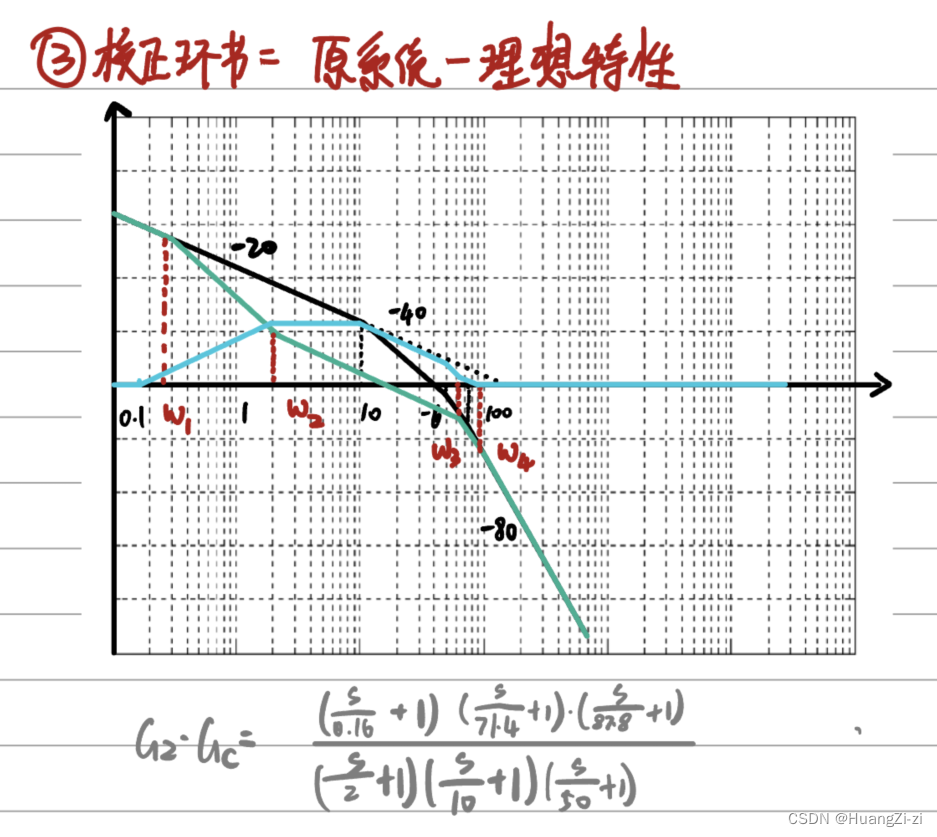
可以看出,校正后 G 2 G c G_2G_c G2Gc小闭环的开环Bode图=原系统Bode-期望特性Bode,通过Bode图反求 G 2 G c G_2G_c G2Gc开环传递函数,再把 G 2 G_2 G2的环节扣除,剩下就是反馈校正环节了。
基本步骤:
- 画原系统Bode曲线
- 根据性能指标,设计理想Bode曲线
- 两曲线相减,得校正后小闭环的Bode曲线
- 校验稳定性、性能指标
下面用一道例题讲解:
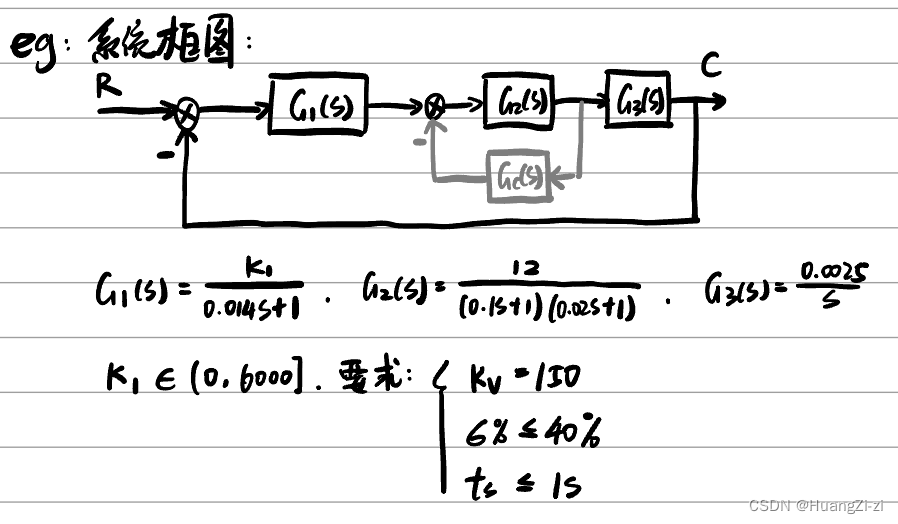
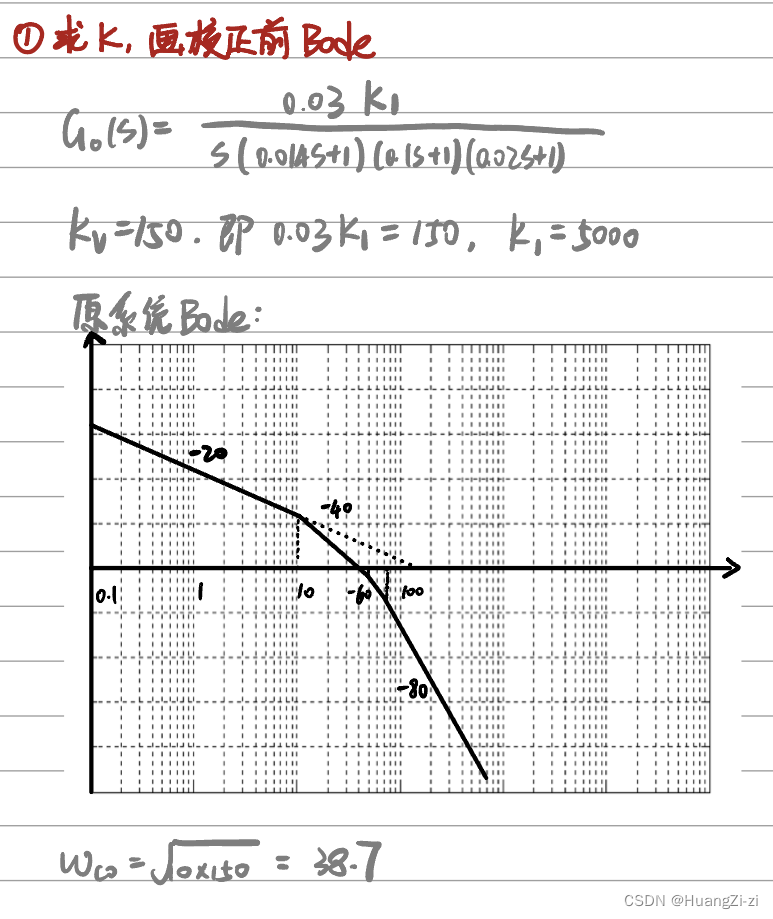
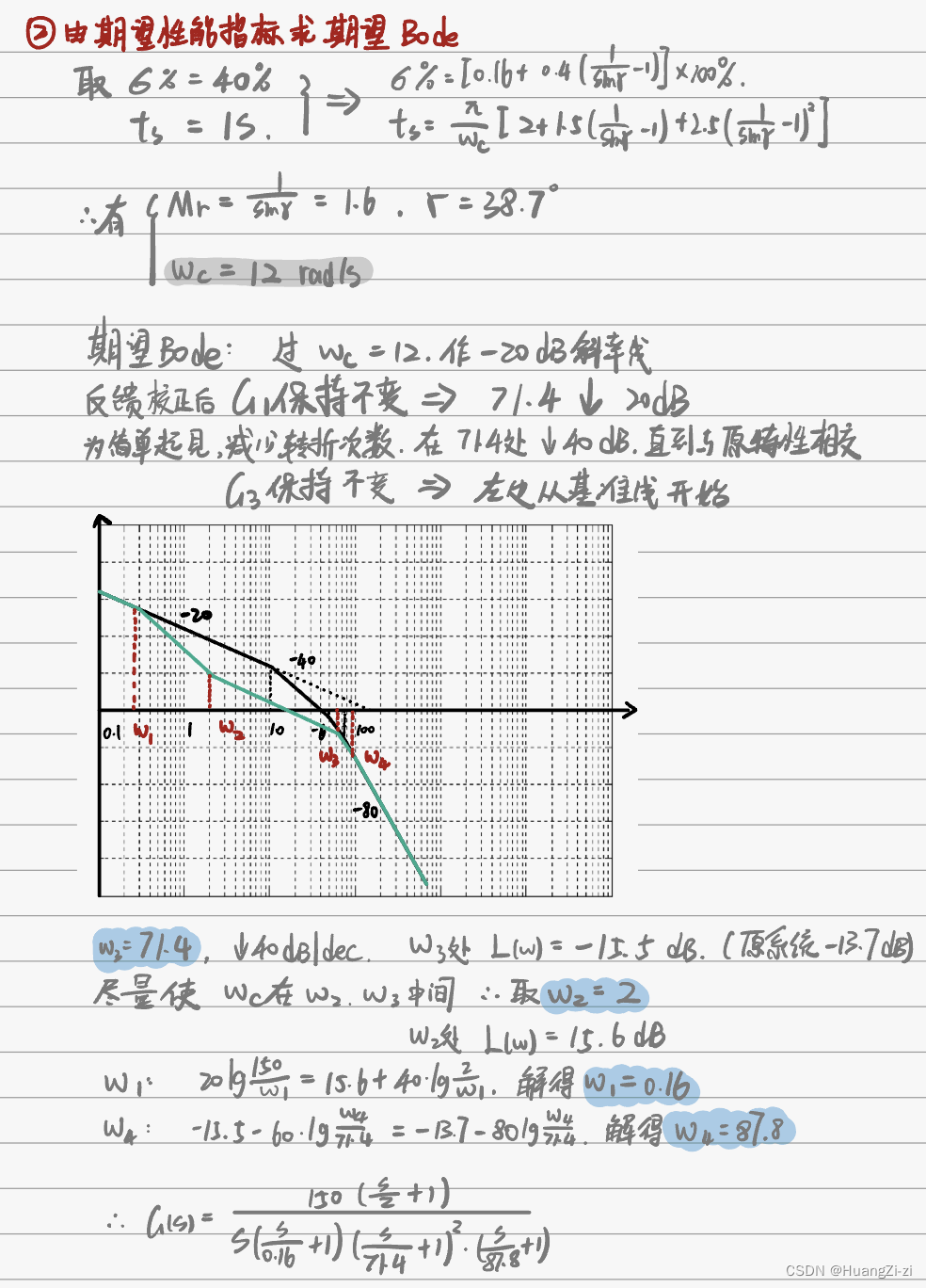
这一步自由度很高,而且如果设计不合理很可能解题失败。一般是订好 ω c \omega_c ωc,画 − 20 d B / d e c -20\rm dB/dec −20dB/dec斜率线,设计中频部分。低频、高频与原曲线保持一致。在转折处,可以利用原曲线转折频率,也可以自己合理设置。为保证系统有足够的相角裕度,最好在距离 ω c \omega_c ωc较远的地方再开始转折。
像这种低频和高频都与原曲线重合的情况,校正环节的Bode一定从0dB开始,到0dB结束;向上折了多少就一定向下折多少。
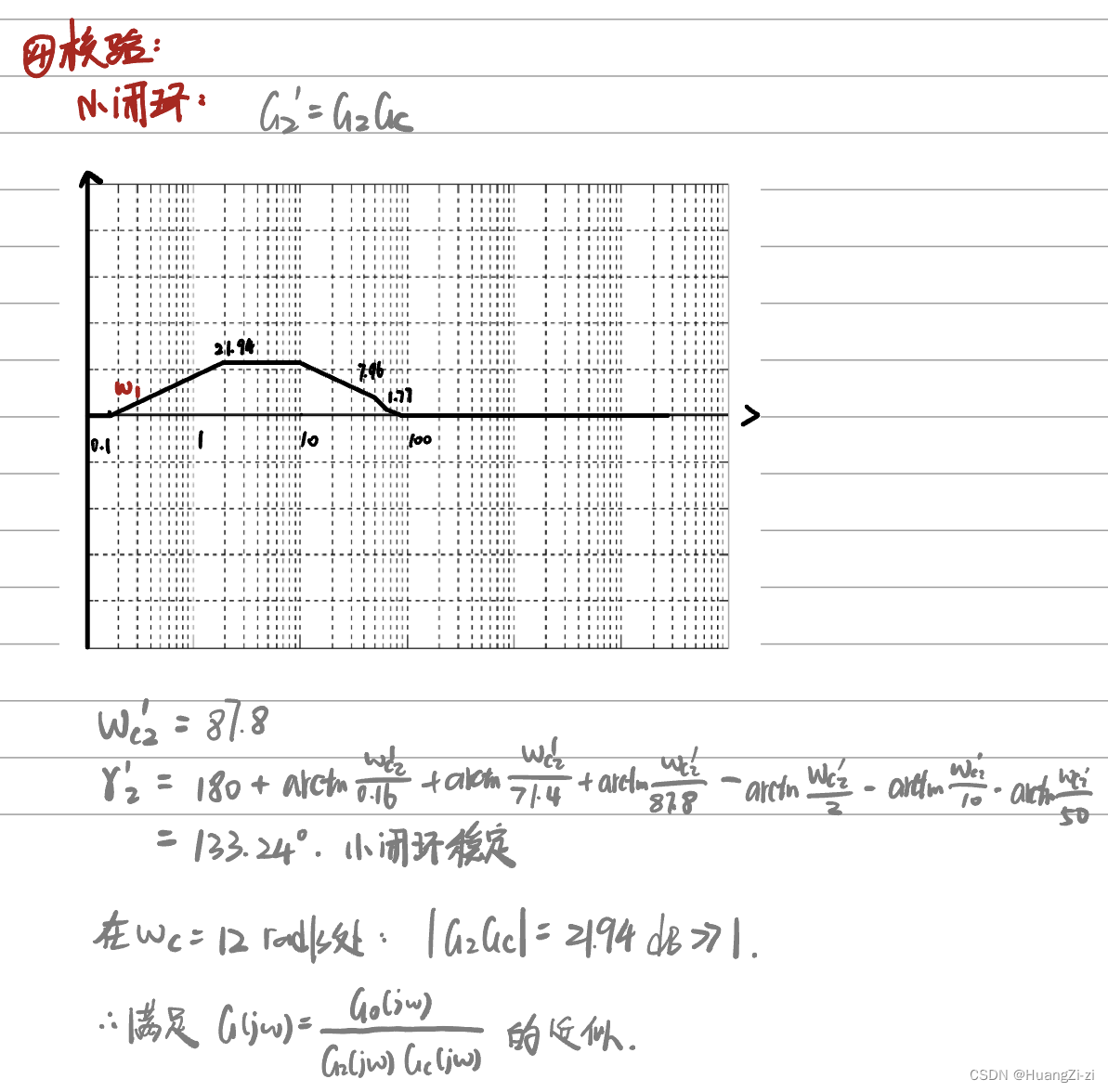
校验首先看加了反馈以后, G 2 G c G_2G_c G2Gc组成的小闭环是否稳定,不过由于一个环节不稳定并不代表整个系统不稳定,所以就算不是很稳定也没关系。
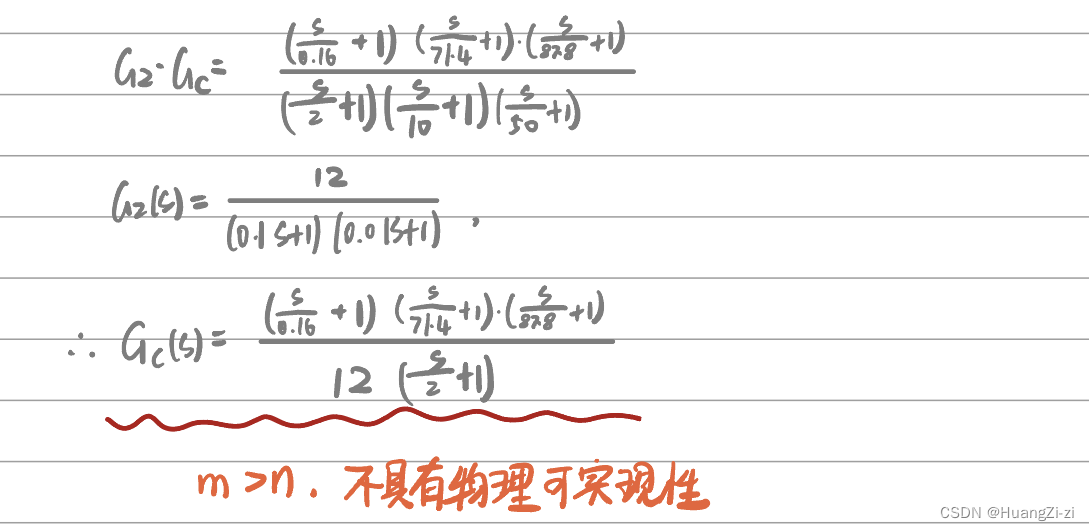
然后校验整个系统,加了反馈之后是否能够满足要求。但是这里很明显校正环节分子三次分母一次,是不具有物理可实现性的,所以回去修改,给分子降次
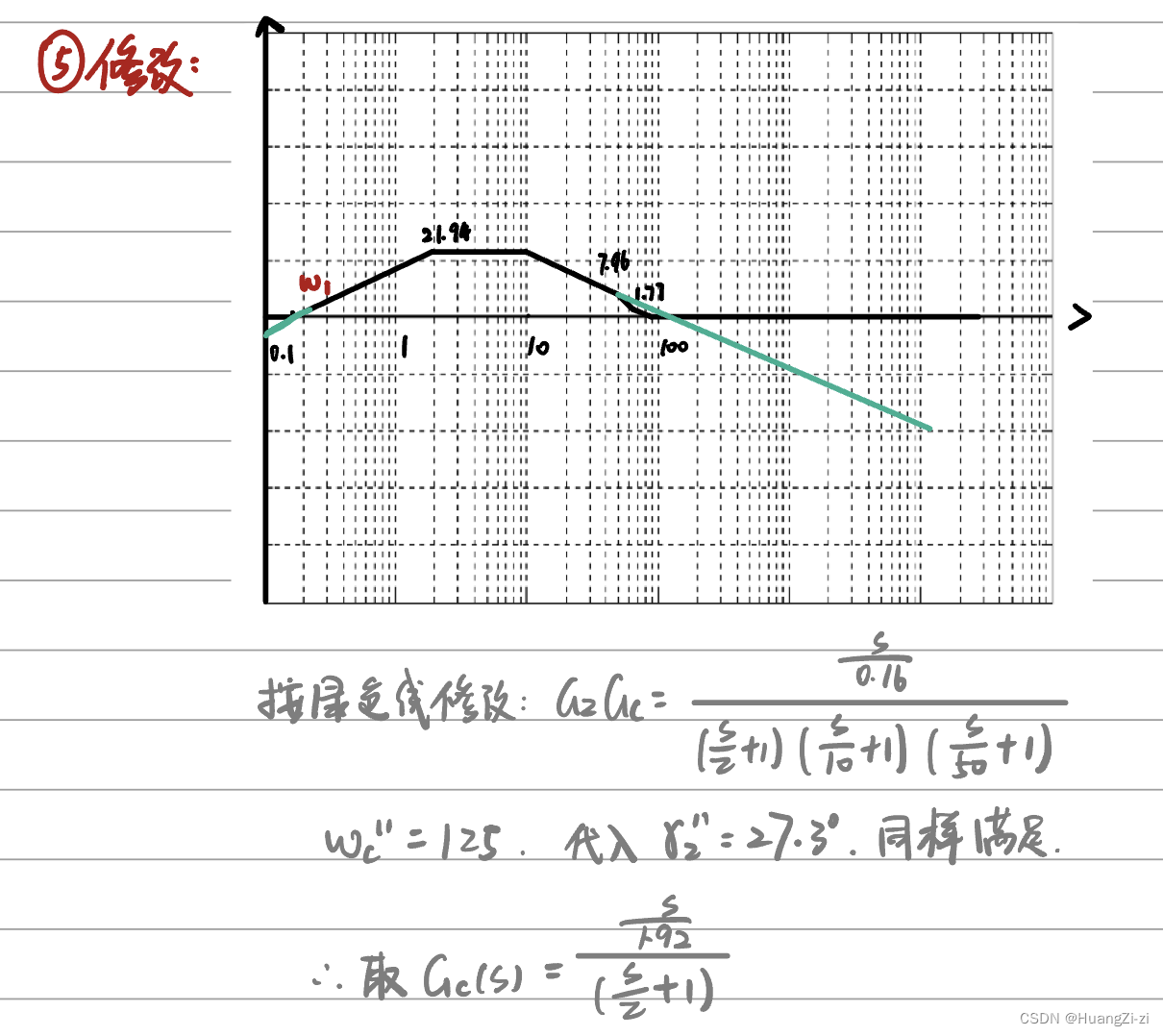
修改肯定不能动中频,从高低两处入手。高频段不用再起来了,压低下去也没问题,还有利于抑制高频噪声。低频段压下去一点也问题不大,静态误差系数由 G 1 G_1 G1管,与反馈没啥关系,所以就直接砍掉三个转折频率
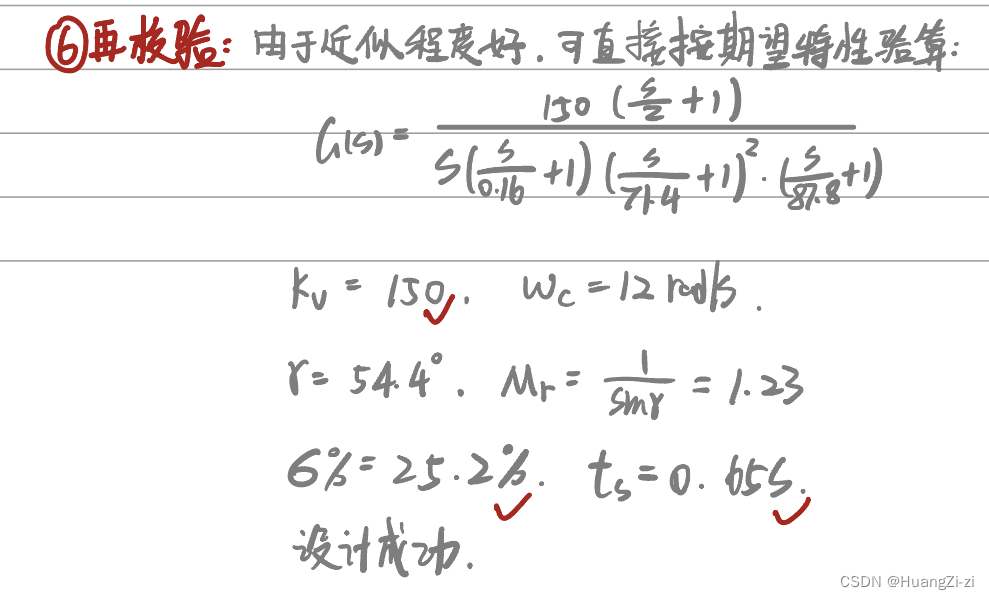
即使修改了设计,也与期望差距不大,所以直接校验设计出来的理想特性就行。
反馈校正与串连校正相比:
- 一般要用到检测元件,成本高、结构复杂
- 抗干扰能力强
- 可以在某一频段消除不希望的特性
前馈与反馈复合控制
一般来说串联校正+反馈校正就已经够用了,但对于高速、高精度系统,一般的校正方法很难满足。而前馈控制,可以不用增加系统型别而提高稳态精度,在保证系统稳定性的同时大幅度减小或消除稳态误差。
前馈控制是一种开环控制,不影响系统稳定性,故应先调串连和反馈校正,再根据需要增加复合校正。
按扰动补偿的复合控制
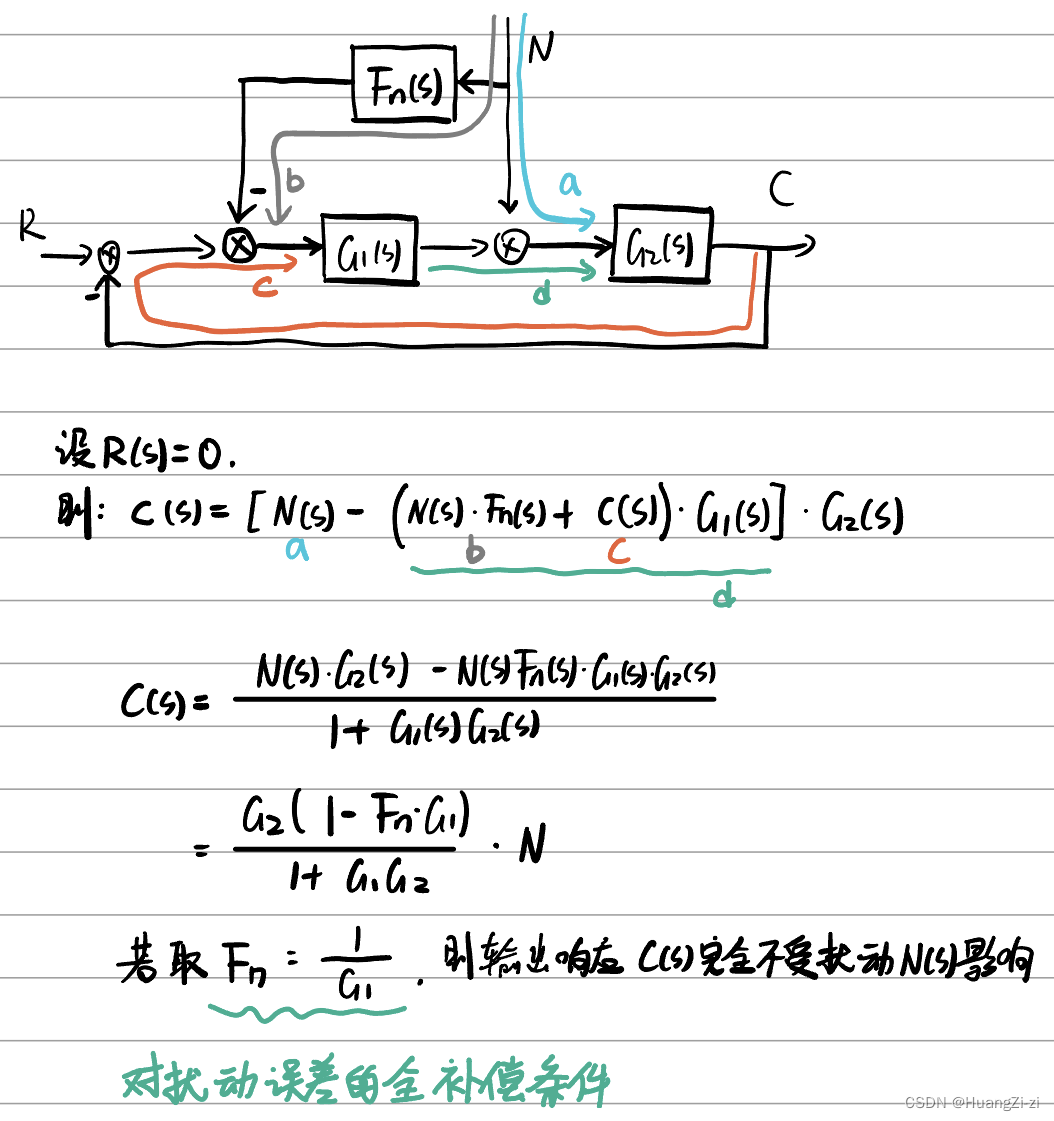
当遇到题目要求"输出完全不受扰动影响"的时候选择这种方案。
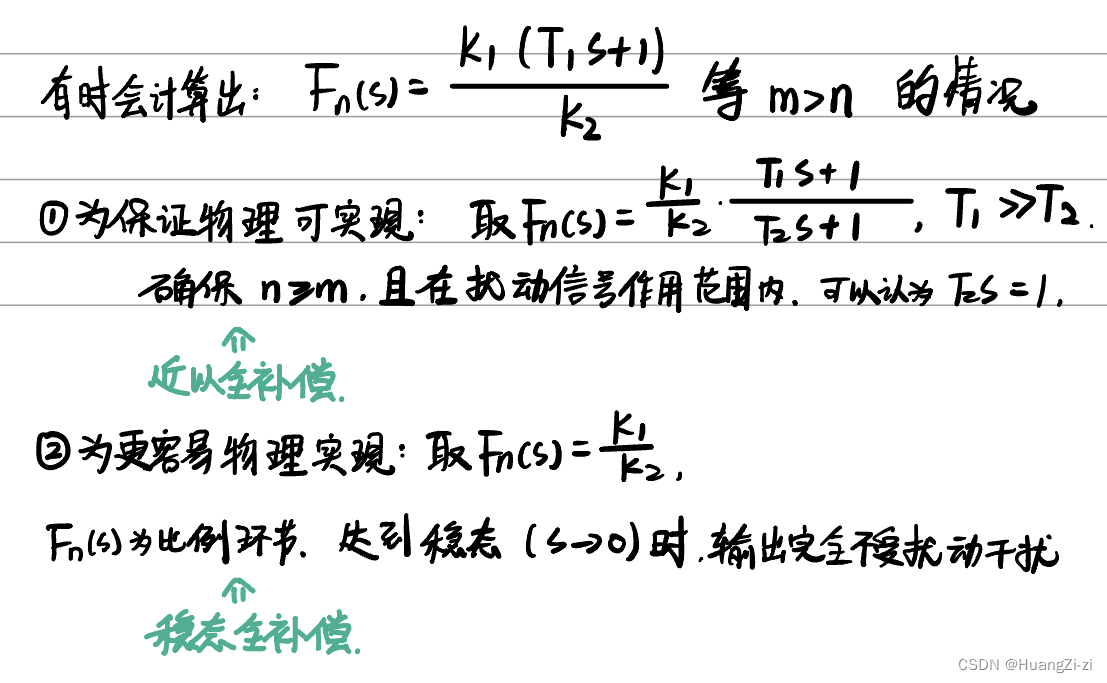
如果想要全补偿而发现前馈通道是物理不可实现的,可以改用近似全补偿或者稳态全补偿
按输入补偿的复合控制
如果误差不是来自于扰动,而是由于系统本身结构造成,就需要从输入端进行补偿。
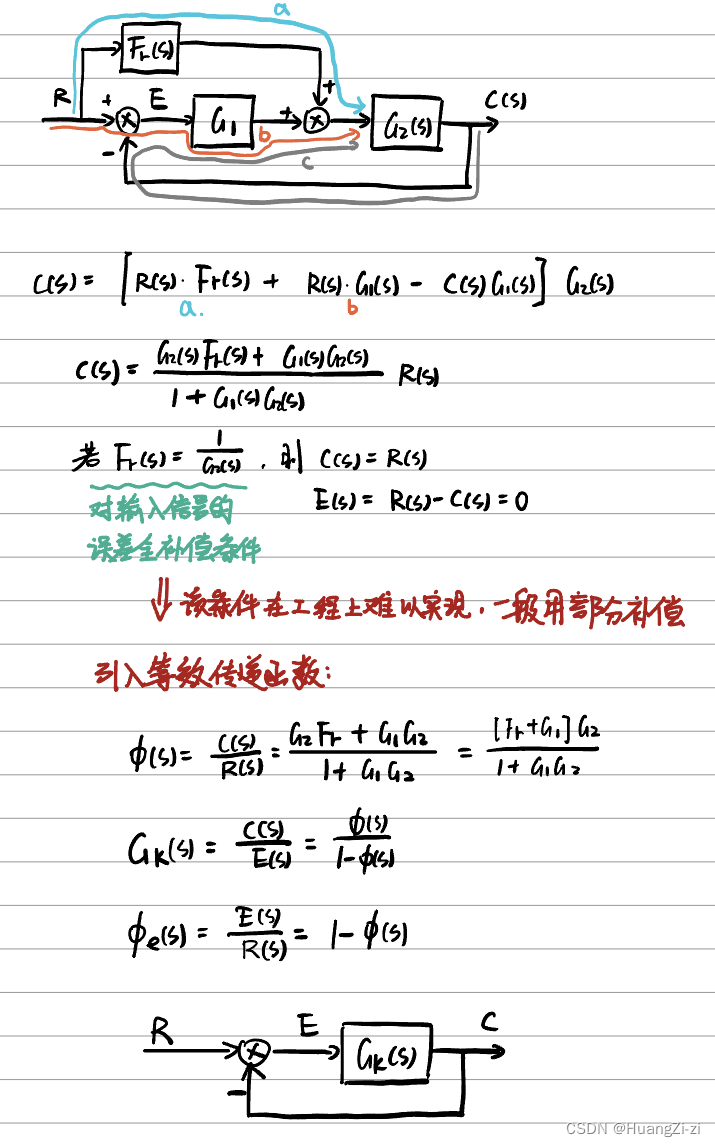
等效传递函数可以方便我们进行分析。这里定义了三个:闭环的、开环的、偏差的,但本质只有一个,就是闭环的。在分析按输入补偿的复合控制系统时,可以直接代入等效传递函数计算。
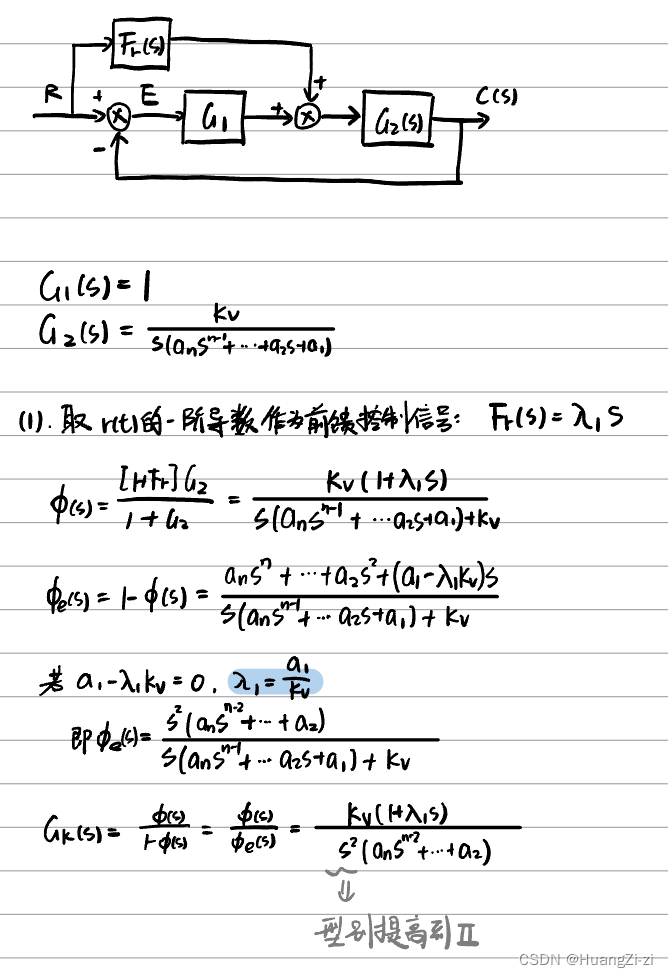

按照输入补偿的复合校正可以等效提高系统型别,减小稳态误差,同时不影响相角,因此不影响系统稳定性。
复合校正比较简单,按照理论推导的步骤就可以解题,因此不再举例题
这篇关于「自控原理」6 频域校正的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






