本文主要是介绍matlab lmi两个未知数,Matlab复杂LMI仿真实例,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
(1)仿真的论文题目:
A PD-Like Protocol With a Time Delay to Average Consensus Control for Multi-Agent Systems Under an Arbitrarily Fast Switching Topology
Dong Wang, Ning Zhang, Jianliang Wang, Senior Member, IEEE, and Wei Wang
(2)仿真内容:其中提出的Theorem 1,固定时滞下的一种Lyapunov方程
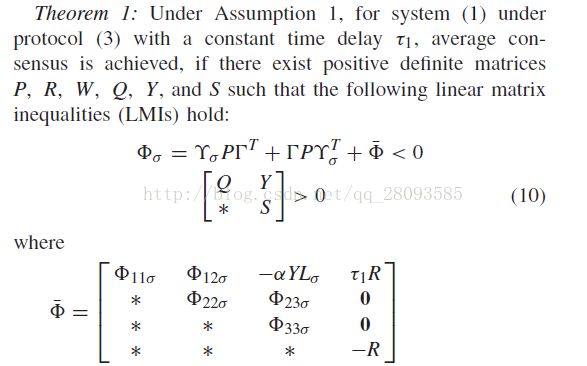

(3)这个式子中的第一个 LMI 比较复杂,一般的 LMI 描述方式难以描述。
分析:矩阵P的大小是3n*3n,将R,W,Q,Y,S都是n*n的,ra 和T矩阵都是4n*3n的。
1.将P矩阵转化为3*3分块矩阵,ra和T分割为4*3的分块矩阵。 块矩阵都是n*n的:
%把P定义为9个n*n的子块矩阵
[P11,~,SP11]=lmivar(1,[10 1]);
[P22,~,SP22]=lmivar(1,[10 1]);
[P33,~,SP33]=lmivar(1,[10 1]);
[P12,~,SP12]=lmivar(2,[10 10]);
[P13,~,SP13]=lmivar(2,[10 10]);
[P23,~,SP23]=lmivar(2,[10 10]);
[P21,~,SP21]=lmivar(3,SP12');
[P31,~,SP31]=lmivar(3,SP13');
[P32,~,SP32]=lmivar(3,SP23');
%P是3n*3n的
[P,~,SP]=lmivar(3,[SP11,SP12,SP13;SP21,SP22,SP23;SP31,SP32,SP33]);
RA=cell(4,3);
T =cell(4,3);
%把RA和T分成分块矩阵
for i=1:4
for j=1:3
RA{i,j}=ra(10*i-9:10*i,10*j-9:10*j);%[1 2 4;1 1 1;2 3 4;]
T{i,j}=t(10*i-9:10*i,10*j-9:10*j);
end
end
2.将P,RA,T的分块矩阵带入第一个矩阵不等式乘开:(下面是ra*P*T'的乘开的结果)
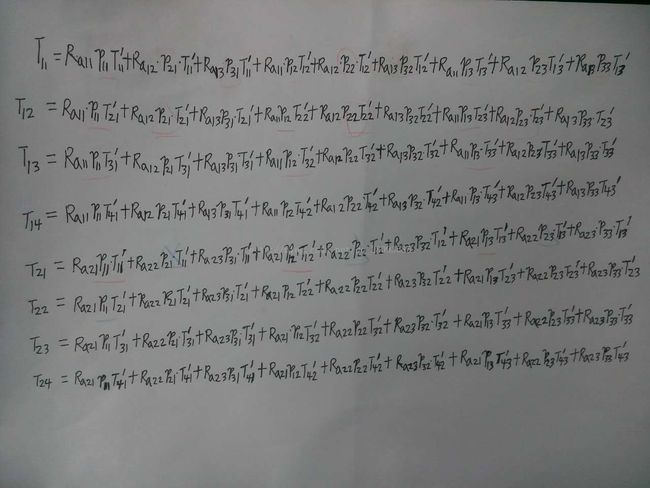
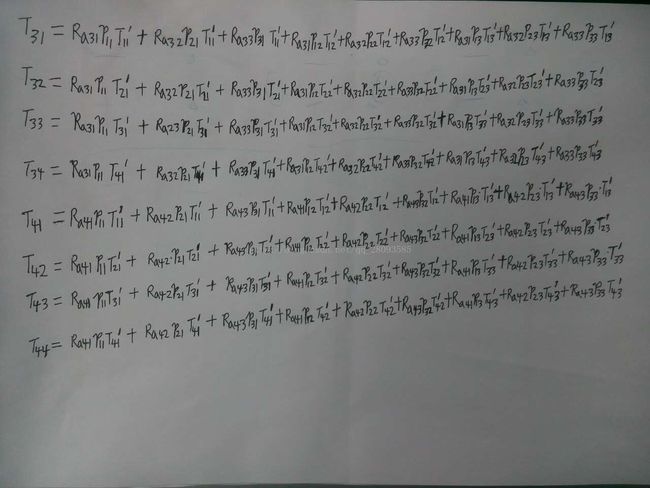
3.同理乘开T*P*ra'
4.之后就可以用一般的LMI方法输入第一个LMI的转化结果和其他的LMI,然后求解。
这篇关于matlab lmi两个未知数,Matlab复杂LMI仿真实例的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





