本文主要是介绍openpnp - 给底部相机加防尘罩,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- openpnp - 给底部相机加防尘罩
- 概述
- 笔记
- END
openpnp - 给底部相机加防尘罩
概述
设备标定完, 看着底部相机, 有点担心掉进去东西, 万一从吸嘴掉下去的料(或者清理设备台面时, 不小心掉进去东西)将顶部相机搞短路怎么办.
就想加个防尘罩, 如果有东西掉进去, 可以掉到机箱里面, 或者用镊子扒拉掉都行.
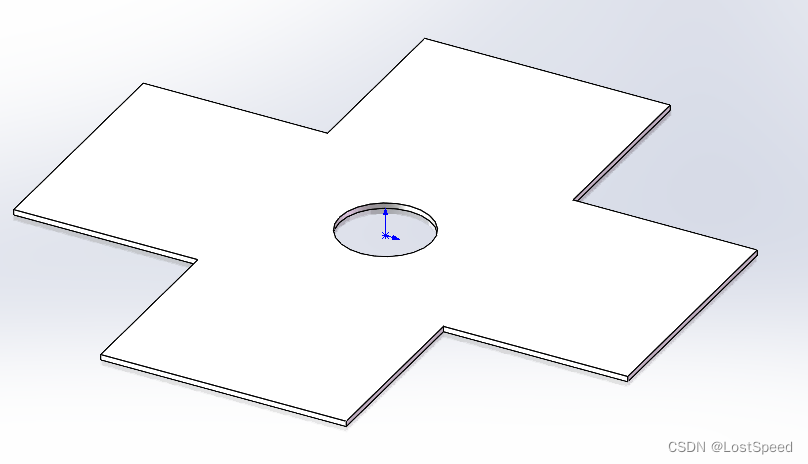
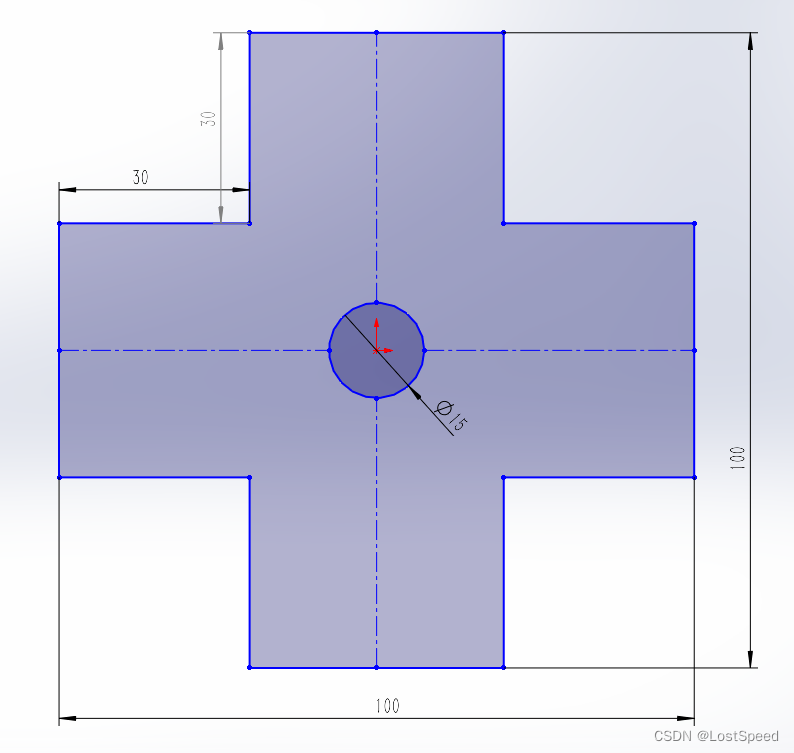
尝试用剪刀, 将密封袋剪了一个100mmx100mm的方块, 四角剪掉4个正方形(30mm x 30mm), 中间留个摄像头的圆洞(15mm x 15mm).
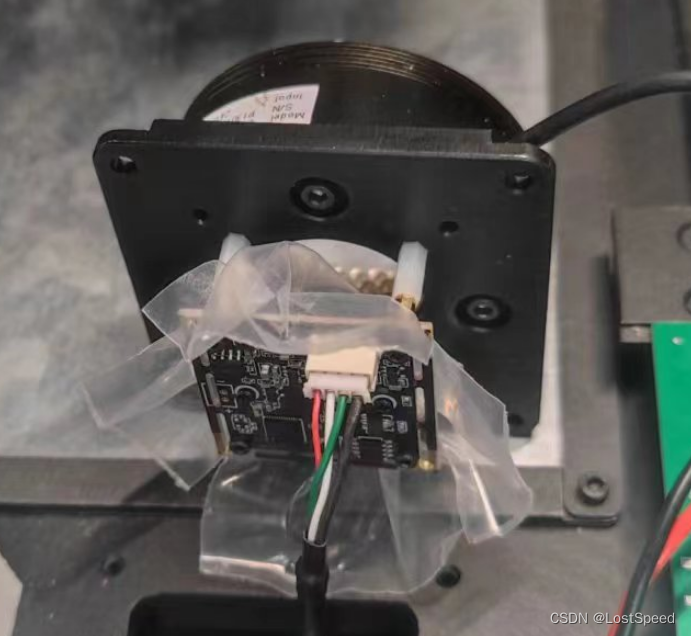
因为底部相机已经就位了, 想直接用镊子将防尘罩装上, 搞不定啊.
只好将底部相机拆下来, 将防尘罩装上.
再开机, N1/N2的吸嘴开机校验不过, 尝试改底部相机位置也不好使.
只能是装完防尘罩, 安装底部相机, 重新标定设备.
要是早想到这个主意, 就不用费这么大的事情. 浪费了好多时间.
笔记
用剪刀检出的防尘罩的大概样子.

END
这篇关于openpnp - 给底部相机加防尘罩的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








