本文主要是介绍STM32-HAL库,双轴xy摇杆按键,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 双轴xy摇杆按键
- CubeMX配置
- 使用
- u_RockerKey.h
- u_RockerKey.c
- main.c
- 方向参考图
双轴xy摇杆按键
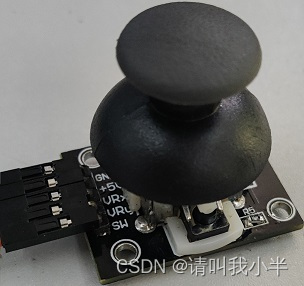
+5V:接电源
VRx:输出x轴的模拟量
VRy:输出x轴的模拟量
SW:z轴的按键,需将R5焊接一个限流电阻才能使用,拉高,低电平触发
CubeMX配置
PB1接VRx,PB0接VRy,PB8接SW
PB8输出模式上拉,PB0为ADC1_IN8,PB1为ADC1_IN9
ADC配置参考:我的文章《ADC多通道采样》的DMA部分:
https://blog.csdn.net/weixin_60301126/article/details/131730675
采样时间按需求配置,这里不过多介绍。
以及串口和定时器的使用也参考我的文章进行使用:
https://blog.csdn.net/weixin_60301126/article/details/131327438
使用
uint16_t g_iAdcx[2];//缓存ADC采样值HAL_ADC_Start_DMA(&hadc1, (uint32_t*)g_iAdcx, sizeof(g_iAdcx) / sizeof(g_iAdcx[0]));//我的连接方式g_iAdcx[0]采集y轴模拟量,g_iAdcx[1]采集x轴模拟量
u_RockerKey.h
#ifndef _U_ROCKERKEY_H_
#define _U_ROCKERKEY_H_#include "main.h"/*************************************/
// 说明
// PB0用于ADC1_IN8,连接摇杆VRy
// PB1用于ADC1_IN9,连接摇杆VRx
// PB8连接遥感SW
// 实现18种按键状态
/*************************************/typedef struct
{uint32_t Y;uint32_t X;uint32_t Z;
}xyzVal_struct; //xyz轴值结构体typedef enum
{KEYSTOP = 0, //摇杆不动 /* 0 */KEYUP, //摇杆上推 /* 1 */KEYSUP, //摇杆慢上推 /* 2 */KEYDOWN, //摇杆下推 /* 3 */KEYSDOWN, //摇杆慢下推 /* 4 */KEYLEFT, //摇杆左推 /* 5 */KEYSLEFT, //摇杆慢左推 /* 6 */KEYRIGHT, //摇杆右推 /* 7 */KEYSRIGHT, //摇杆慢右推 /* 8 */KEYPRESS, //摇杆按下 /* 9 */KEYUPLF, //摇杆上左推 /* 10 */KEYSUPLF, //摇杆慢上左推 /* 11 */KEYUPRI, //摇杆上右推 /* 12 */KEYSUPRI, //摇杆慢上左推 /* 13 */KEYDOWNLF, //摇杆下左推 /* 14 */KEYSDOWNLF, //摇杆慢下左推 /* 15 */KEYDOWNRI, //摇杆下右推 /* 16 */KEYSDOWNRI, //摇杆慢下右推 /* 17 */KEYState_MAX /* 18 */
}E_RKEYState;typedef enum
{Yup = 0, //y轴上位 /* y0 */Ysup, //y轴慢上位 /* y1 */Ysp, //y轴中位 /* y2 */Ydn, //y轴下位 /* y4 */Ysdn //y轴慢下位 /* y3 */
}E_YaxleState;typedef enum
{Xlf = 0, //x轴左位 /* x0 */Xslf, //x轴慢左位 /* x1 */ Xsp, //x轴中位 /* x2 */Xri, //x轴右位 /* x4 */Xsri //x轴慢右位 /* x3 */
}E_XaxleState;typedef enum
{Zup = 0, //z轴上位 /* z0 */Zdn //z轴下位 /* z1 */
}E_ZaxleState;void Get_xyzVal(void); //获取xy轴的值
E_RKEYState Get_KeyState(void); //获取摇杆的状态
void Test(E_RKEYState state); //测试摇杆功能#endif //_U_ROCKERKEY_H_u_RockerKey.c
#include "u_RockerKey.h"
#include "u_print.h"xyzVal_struct xyzVal;
uint16_t g_iAdcx[2];/*函数名称:获取xyz轴的值*/
/*形参:无 */
/*返回值:无 */
void Get_xyzVal(void)
{ HAL_ADC_Start_DMA(&hadc1, (uint32_t*)g_iAdcx, sizeof(g_iAdcx) / sizeof(g_iAdcx[0]));
// PrintfDebug("Y = %d\r\nX = %d\r\n", g_iAdcx[0], g_iAdcx[1]);if(g_iAdcx[0]<1000 && g_iAdcx[0]>0) //y0xyzVal.Y = Yup;else if(g_iAdcx[0]<1800 && g_iAdcx[0]>1000) //y1xyzVal.Y = Ysup; else if(g_iAdcx[0]<2200 && g_iAdcx[0]>1800) //y2xyzVal.Y = Ysp; else if(g_iAdcx[0]<3000 && g_iAdcx[0]>2200) //y3xyzVal.Y = Ysdn; else if(g_iAdcx[0]<4200 && g_iAdcx[0]>3000) //y4xyzVal.Y = Ydn;if(g_iAdcx[1]<1000 && g_iAdcx[1]>0) //x0xyzVal.X = Xlf; else if(g_iAdcx[1]<1800 && g_iAdcx[1]>1000) //x1xyzVal.X = Xslf; else if(g_iAdcx[1]<2200 && g_iAdcx[1]>1800) //x2xyzVal.X = Xsp; else if(g_iAdcx[1]<3000 && g_iAdcx[1]>2200) //x3xyzVal.X = Xsri; else if(g_iAdcx[1]<4200 && g_iAdcx[1]>3000) //x4xyzVal.X = Xri; if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_8) == GPIO_PIN_RESET)xyzVal.Z = Zdn; else if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_8) == GPIO_PIN_SET)xyzVal.Z = Zup;
// PrintfDebug("xyzVal.X = %d\r\nxyzVal.Y = %d\r\nxyzVal.Z = %d\r\n", xyzVal.X, xyzVal.Y, xyzVal.Z);
}/*函数名称:获取摇杆的状态 */
/*形参:无 */
/*返回值:keystate */
/*说明:keystate为E_RKEYState的变量,返回按键状态值*/
E_RKEYState Get_KeyState(void)
{E_RKEYState keystate;Get_xyzVal();
// PrintfDebug("%d %d\r\n", xyzVal.X, xyzVal.Y); //摇杆状态编码if((xyzVal.Y == Ysp) && (xyzVal.X == Xsp) && (xyzVal.Z == Zup)) //x2 y2 z0 0keystate = KEYSTOP; else if((xyzVal.Y == Yup) && (xyzVal.X == Xsp)) //x2 y0 z0 1keystate = KEYUP; else if((xyzVal.Y == Ysup) && (xyzVal.X == Xsp)) //x2 y1 z0 2keystate = KEYSUP; else if((xyzVal.Y == Ydn) && (xyzVal.X == Xsp)) //x2 y4 z0 3keystate = KEYDOWN; else if((xyzVal.Y == Ysdn) && (xyzVal.X == Xsp)) //x2 y3 z0 4keystate = KEYSDOWN; else if((xyzVal.Y == Ysp) && (xyzVal.X == Xlf)) //x0 y2 z0 5keystate = KEYLEFT; else if((xyzVal.Y == Ysp) && (xyzVal.X == Xslf)) //x1 y2 z0 6keystate = KEYSLEFT; else if((xyzVal.Y == Ysp) && (xyzVal.X == Xri)) //x4 y2 z0 7keystate = KEYRIGHT; else if((xyzVal.Y == Ysp) && (xyzVal.X == Xsri)) //x3 y2 z0 8keystate = KEYSRIGHT; else if(xyzVal.Z == Zdn) //x2 y2 z1 9keystate = KEYPRESS;else if(((xyzVal.Y==Yup)&&(xyzVal.X==Xlf))||((xyzVal.Y==Yup)&&(xyzVal.X==Xslf))||((xyzVal.Y==Ysup)&&(xyzVal.X==Xlf))) //x01 y01 z0 10keystate = KEYUPLF;else if((xyzVal.Y == Ysup) && (xyzVal.X == Xslf)) //x1 y1 z0 11keystate = KEYSUPLF;else if(((xyzVal.Y==Yup)&&(xyzVal.X==Xri))||((xyzVal.Y==Yup)&&(xyzVal.X==Xsri))||((xyzVal.Y==Ysup)&&(xyzVal.X==Xri))) //x34 y01 z0 12keystate = KEYUPRI;else if((xyzVal.Y == Ysup) && (xyzVal.X == Xsri)) //x3 y1 z0 13keystate = KEYSUPRI;else if(((xyzVal.Y==Ydn)&&(xyzVal.X==Xlf))||((xyzVal.Y==Ydn)&&(xyzVal.X==Xslf))||((xyzVal.Y==Ysdn)&&(xyzVal.X==Xlf))) //x01 y34 z0 14keystate = KEYDOWNLF;else if((xyzVal.Y == Ysdn) && (xyzVal.X == Xslf)) //x1 y3 z0 15keystate = KEYSDOWNLF;else if(((xyzVal.Y==Ydn)&&(xyzVal.X==Xri))||((xyzVal.Y==Ydn)&&(xyzVal.X==Xsri))||((xyzVal.Y==Ysdn)&&(xyzVal.X==Xri))) //x34 y34 z0 16keystate = KEYDOWNRI;else if((xyzVal.Y == Ysdn) && (xyzVal.X == Xsri)) //x3 y3 z0 17keystate = KEYSDOWNRI;elsekeystate = KEYState_MAX;
// PrintfDebug("keystate = %d\r\n", keystate);return keystate;
}/*函数名称:测试摇杆功能 */
/*形参:E_RKEYState state */
/*返回值:无 */
void Test(E_RKEYState state)
{ switch(state){case KEYSTOP:PrintfDebug("No State\r\n"); break;case KEYUP:PrintfDebug("Key Up\r\n"); break;case KEYSUP:PrintfDebug("Key Slowly Up\r\n"); break;case KEYDOWN:PrintfDebug("Key Down\r\n"); break;case KEYSDOWN:PrintfDebug("Key Slowly Down\r\n"); break;case KEYLEFT:PrintfDebug("Key Left\r\n"); break;case KEYSLEFT:PrintfDebug("Key Slowly Left\r\n"); break;case KEYRIGHT:PrintfDebug("Key Right\r\n");break;case KEYSRIGHT:PrintfDebug("Key Slowly Right\r\n");break;case KEYPRESS:PrintfDebug("Press Key\r\n");break;case KEYUPLF:PrintfDebug("Key Up Left\r\n");break;case KEYSUPLF:PrintfDebug("Key Slowly Up Left\r\n");break;case KEYUPRI:PrintfDebug("Key Up Right\r\n");break;case KEYSUPRI:PrintfDebug("Key Slowly Up Right\r\n");break;case KEYDOWNLF:PrintfDebug("Key Down Left\r\n");break;case KEYSDOWNLF:PrintfDebug("Key Slowly Down Left\r\n");break;case KEYDOWNRI:PrintfDebug("Key Down Right\r\n");break;case KEYSDOWNRI:PrintfDebug("Key Slowly Down Right\r\n");break;case KEYState_MAX:PrintfDebug("State\r\n");break;default:break;}
}main.c
static void Proc1sTask(void); int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_DMA_Init();MX_ADC1_Init();MX_USART1_UART_Init();MX_TIM6_Init();PrintfDebug("OK\r\n");while (1){Proc100msTask();}
}static void Proc100msTask(void) //1s任务
{if(Get100msFlag()){Test(Get_KeyState());Clr100msFlag();}
}
方向参考图
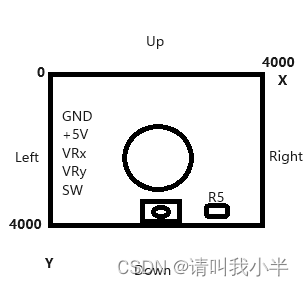
这篇关于STM32-HAL库,双轴xy摇杆按键的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!