本文主要是介绍汽车智能座舱/智能驾驶SOC -2,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
第二篇(笔记)。
未来智能汽车电子电气将会是集中式架构(车载数据中心)+虚拟化技术(提供车载数据中心灵活性和安全性)这个几乎是毋庸置疑的了。国际大厂也否纷纷布局超算芯片和车载数据中心平台。但是演进需要时间,且不同车企、车型对智能化要求也有差异。所以芯片策略也可能有多种,大致如下:
1. NVIDIA Orin占有智能驾驶平台60%+份额,他本来就提供高端自动驾驶解决方案,其芯片也有算力剩余,继续向座舱领域延伸。即,要选择NVIDIA自动驾驶平台的车企/车型就也直接使用了这个芯片提供的座舱了,这是集中式架构的终极。
2. 其他厂家:智驾+座舱+其他≈集中架构。这样给了客户(主机厂)更多选择,也可以满足不同车型的不同智能化需求。为集中式架构演进提供了时间轴(过程)。
IC厂、Tier-1企业、汽车主机厂的目的都是赚钱,更少/简单的投入,获取更大/长的营收价值是核心。针对于芯片企业,扩大客户用户量,摊薄芯片研发和制造成本也是主要考虑的因素之一。Tier-1厂,单芯片方案开发和支持更简单,投入更低。而车企觉得,当今汽车的高端智能化程度还没有成为影响购车消费者决策的决定因素,座舱、智驾L2、3、4要一步一步来。如上是一个性能、功耗、成本、需求和灵活性的博弈。
当今汽车电子电气智能化是一个高速发展的行业(赛道)。芯片迭代很快,生命周期短,出货量不高,这使得研发成本很难摊薄。跟随的用途不大,这一代如不能大批进入车企的供应链体系,就要重新开始下一代产品了。
举例子做个展望。而当今新能源(智能)汽车中100BASE-T1、1000BASE-T1已被广泛使用,后面因为数据传输速率的要求进一步提升,2.5Gbps、5Gbps或者光通信网络也可能会进一步布局到车载网络传输上。车载存储也会快速的从EMMC、UFS向NVMe/PCIe等更高技术转化。
各厂家押注高阶自动驾驶,是为了保证将来有发展(有饭吃),自动驾驶更可能成为各企业在汽车领域的决胜点。但抛去幻想,国内芯片厂商受制于芯片IP供应、制程限制、研发和人员投入等,目前只能专注于中低端芯片或域控平台开发,弯道超车也得一步一步来。
ARM为车载提供了专用的IP包含(不完全整理):
1. CPU的:AE20(NVIDIA Orin/Ambarella CV3等采用)、Cortex-A78AE、Cortex-A65AE。还有被广泛采用Cortex-A55,单核多线程核心的优势在此领域突显。
2. ISP的:Mali-C78AE.
3. GPU的:Mali-G78AE.
4. Real-Time Processor:Cortex-R52、Cortex-R52+.
在ARM的主导下,各大汽车IC厂家加入,建立了SOAFEE(Scalable Open Architecture for Embedded Edge,面向嵌入式边缘的可扩展开发架构),来为汽车芯片厂家异构计算平台下复杂的系统架构提供支持。为大厂计算平台系统架构提供便利的同时,也给行业建立了护城河。
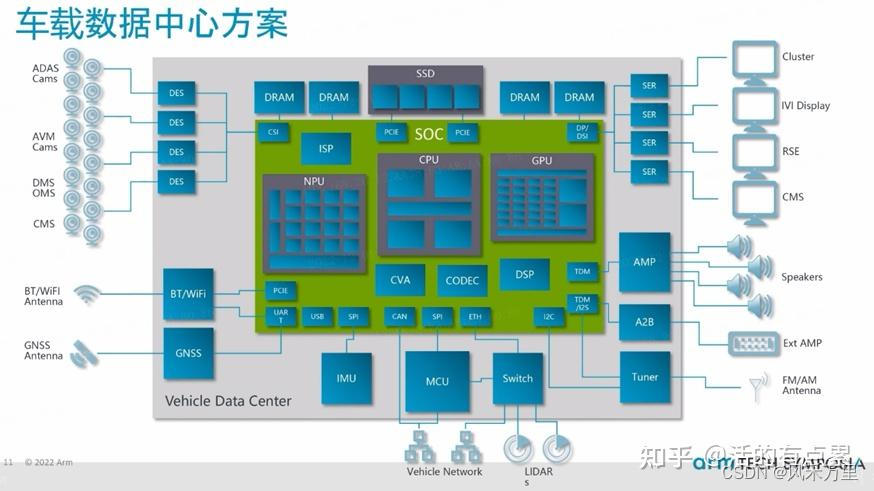
下面是,小鹏汽车嵌入式系统高级研究专家 唐黾 对未来车载数据中心方案芯片需求的构想(这个词合适不?),这个也有较大的参考意义。
虽然在新能源汽车领域,说到座舱就聊到高通、智驾就提到NVIDIA。但是我们仍需要清楚,新能源(是趋势,但)汽车销量仅占乘用车销量总量的不到25%(欧洲、中国等),且新能源汽车的智能化程度也有较大差异。汽车电子IC巨头仍然是:瑞萨、英飞凌、ST、NXP、TI、博世等,他们也在这些方向会继续前行。而中国厂商大多的做法也像是蚂蚁搬家,大公司搬大块,小公司吃小块。从矩阵大灯、车位流水等、电机控制MCU、ETH PHY、CAN芯片、车钥匙 等等逐步蚕食大厂份额。
仅从智能大芯片方面,可以有4个维度来描述现有公司。
1. 数据中心:NVIDIA、高通、Intel、AMD;
2. 座舱:MTK、高通、三星、AMD、芯擎科技、瑞萨、NXP、芯驰科技;
3. 智驾:Mobileye、地平线、黑芝麻、寒武纪;
4. 域控:NXP、瑞萨;
2022.12.06 MARK
这篇关于汽车智能座舱/智能驾驶SOC -2的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!