本文主要是介绍【无标题】dp80采集机和机器人通信相关框架总结,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
采血机器人通信解析相关框架总结:
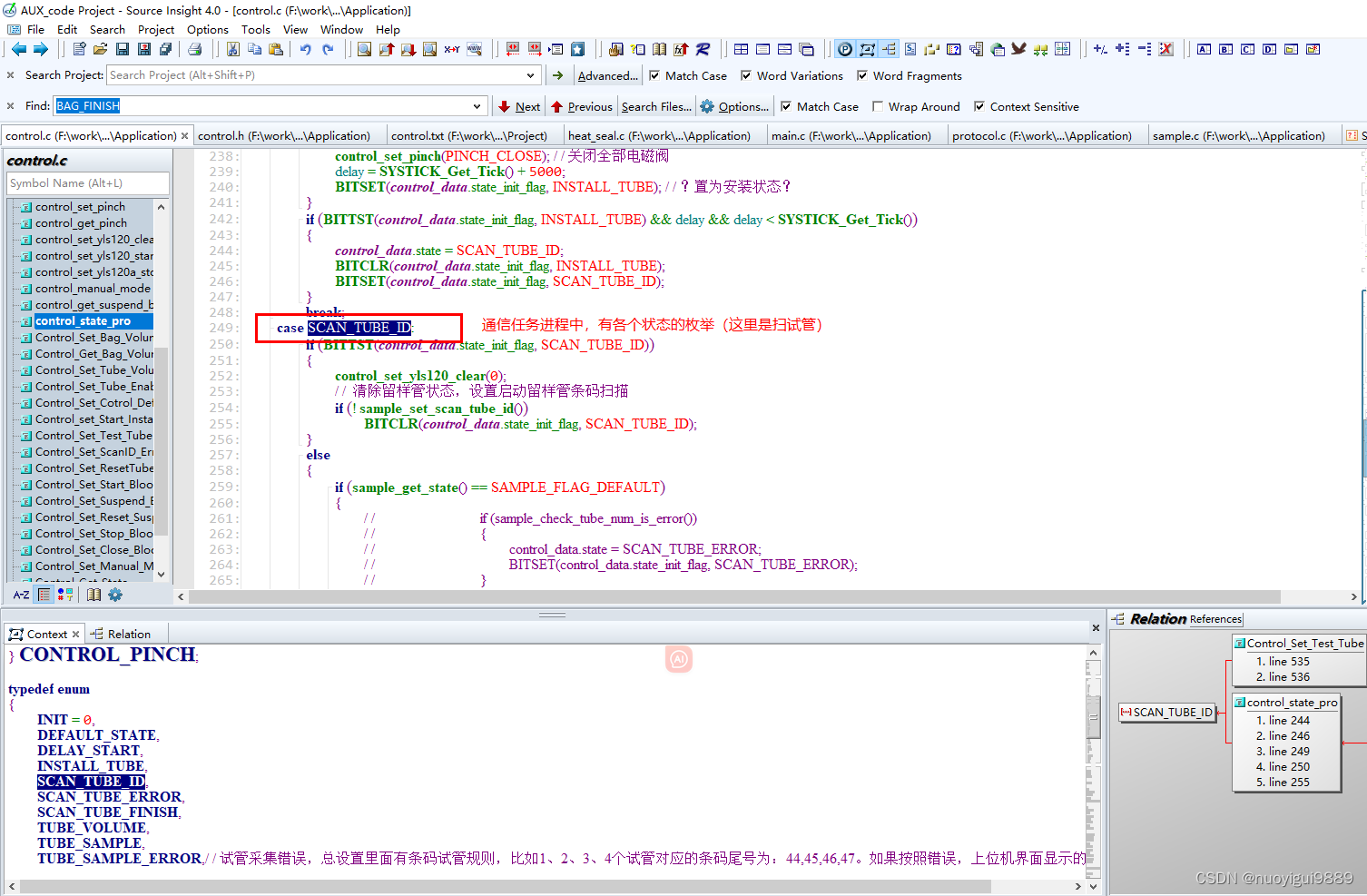
类似于dp80,将整个过程进行了分解如下:
类似于dp80,将整个过程进行了分解如下:

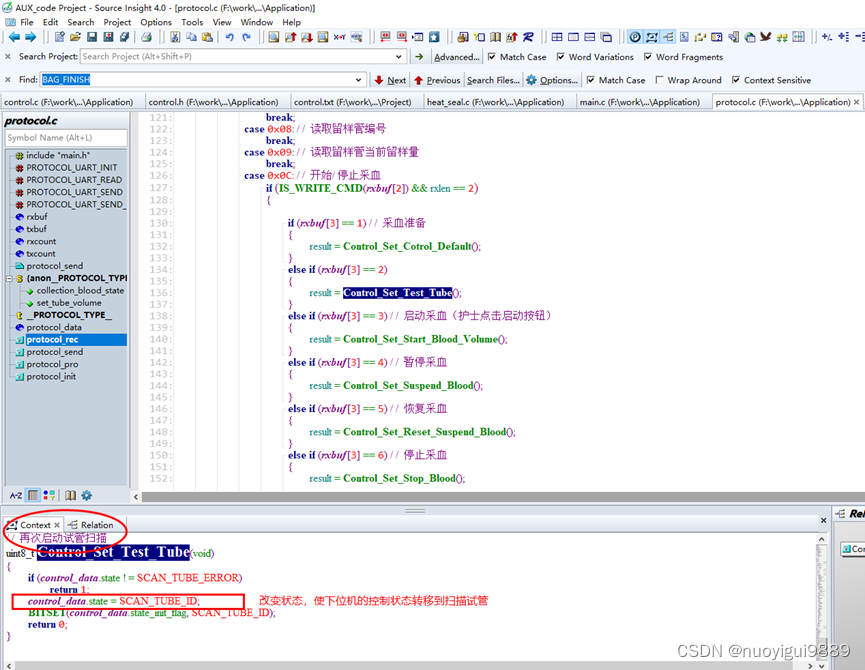
上位机界面在进行点击操作的时候,先是通信协议的解析,解析后改变采血的控制状态如下:
Dp80主要框架解析
这篇关于【无标题】dp80采集机和机器人通信相关框架总结的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
本文主要是介绍【无标题】dp80采集机和机器人通信相关框架总结,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
类似于dp80,将整个过程进行了分解如下:
类似于dp80,将整个过程进行了分解如下:
上位机界面在进行点击操作的时候,先是通信协议的解析,解析后改变采血的控制状态如下:
这篇关于【无标题】dp80采集机和机器人通信相关框架总结的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
http://www.chinasem.cn/article/412692。
23002807@qq.com







