本文主要是介绍OAK相机通过振动测试!,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
编辑:OAK中国
首发:oakchina.cn
喜欢的话,请多多👍⭐️✍
内容可能会不定期更新,官网内容都是最新的,请查看首发地址链接。
Hello,大家好,这里是OAK中国,我是助手君。
当OAK-D相机出现在人们视野时,因其板载AI和CV功能,让不少人眼前一亮。加上其强大的性能和相对低廉的价格,一度引起热潮,并在众筹网站上筹集到上百万美元。
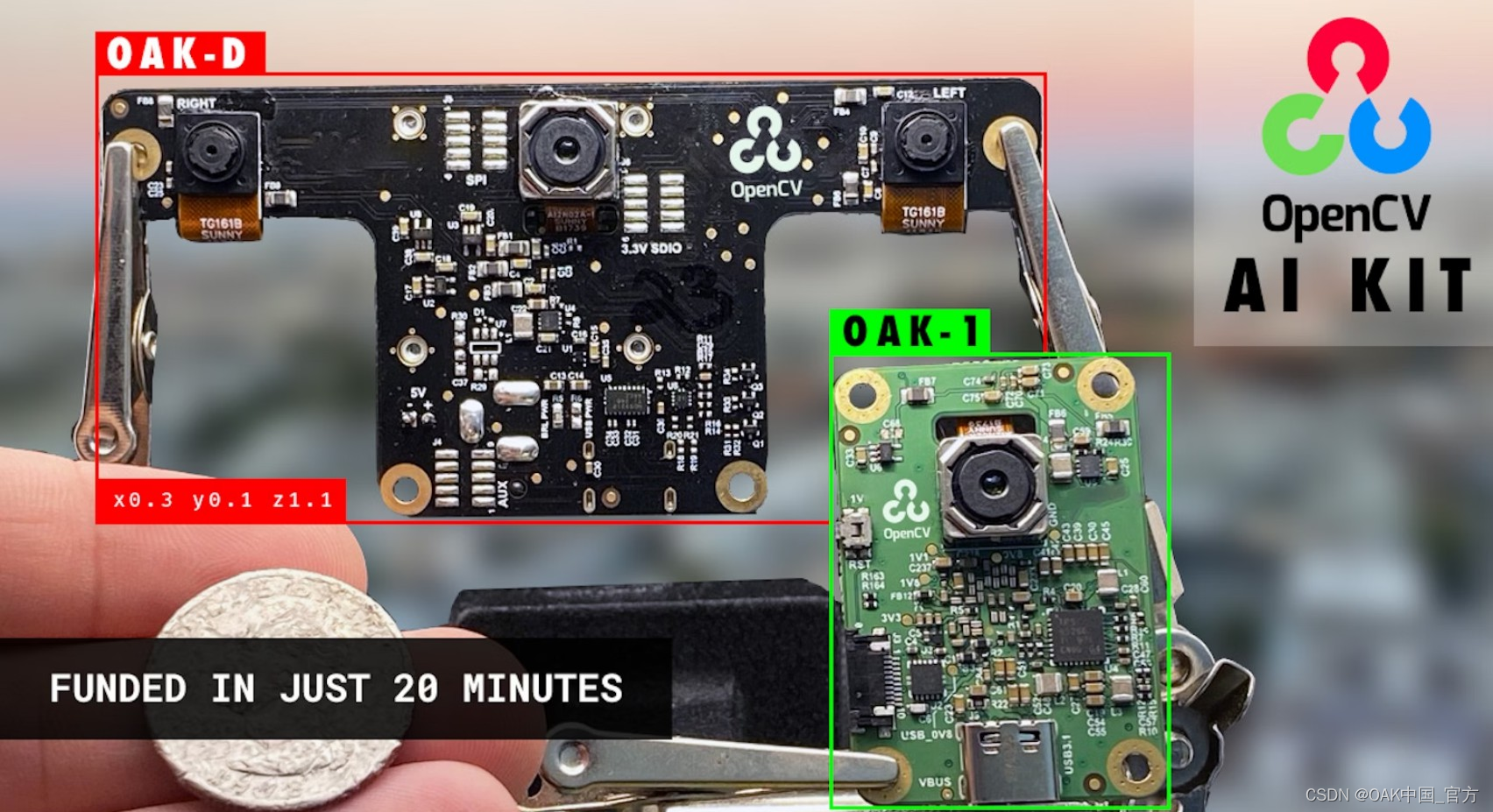
虽然OAK-D为一些3D人工智能场景表现出色,但在工业和机械设计上,它仍有很大的改进空间。比如,OAK-D的尺寸其实比它实际需要的大得多。
于是在2022年我们推出了Series 2系列产品,改进了工业和机械设计。不仅尺寸大大减小了,也简化了散热设计。

在和客户的沟通中,我们发现OAK相机有时会在极端恶劣的户外环境下全天候连续使用,包括水下、高湿度/盐度地区、工厂、农场,甚至外太空。
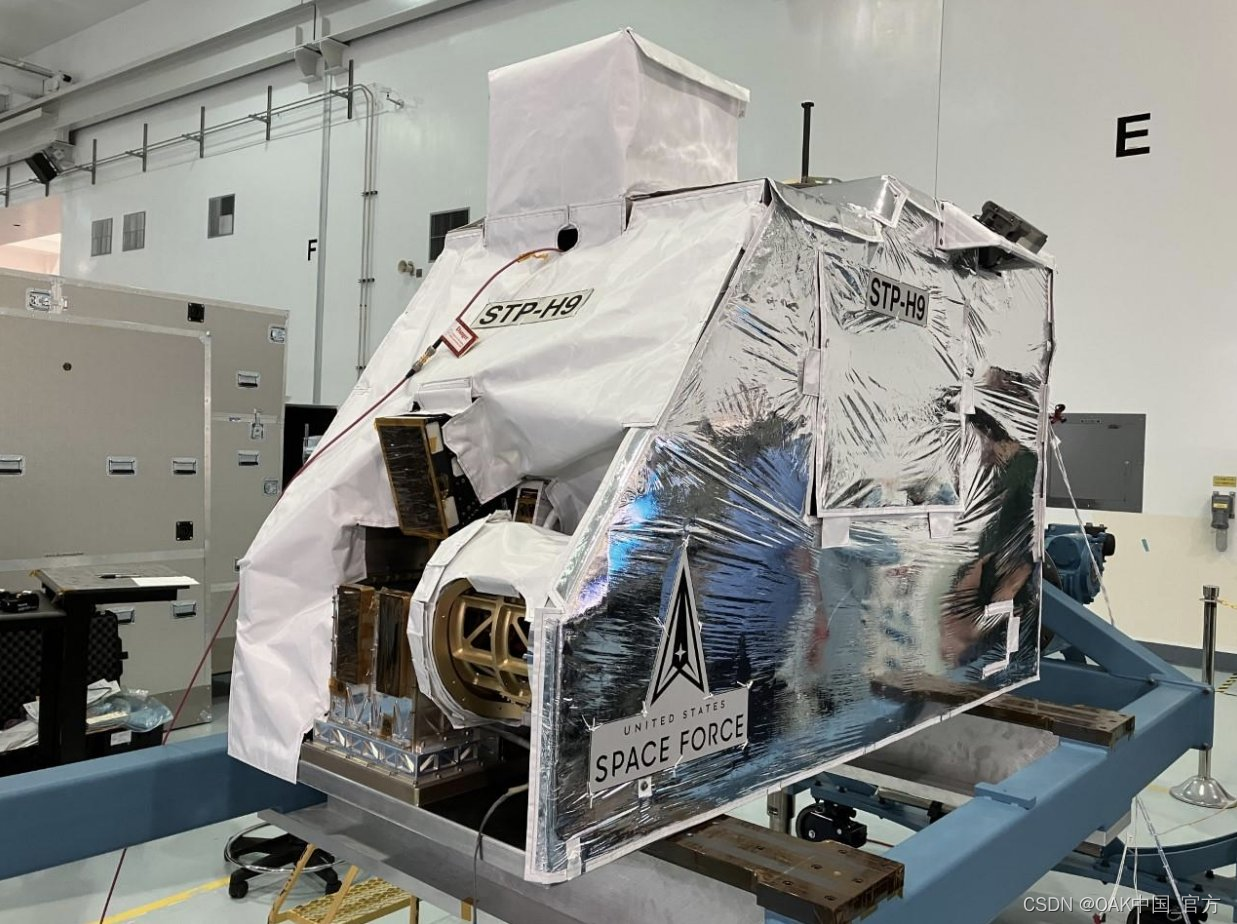
这些反馈让我们扩大了工业设计和机械工程团队,以更好地了解和改进我们的硬件,为我们的客户服务。就在不久前,我们完成一项新改进,OAK-D-Pro将有IP66级防水!
在另一种常见的使用环境中,我们的硬件会受到振动,比如在无人机上、在车上、在大型机械上等等。在这种应用场景下,我们一般推荐选择定焦(FF)的OAK相机。(了解原因)我们现在很高兴地与大家分享,我们广受欢迎的几款OAK相机已通过 EN 60068-2-6:2008 和 ISO 15998:2008 第 7.2.3 条表 1 规定的振动测试(测试在名为SIQ的第三方实验室完成)。
我们测试了以下相机:
- OAK-D-Pro(间接包括OAK-D-S2、OAK-D-Pro-W、OAK-D-W)
- OAK-D-Pro-PoE(间接包括OAK-D-S2-PoE、OAK-D-Pro-W-PoE、OAK-D-W-PoE)
- OAK-D-PoE
注:间接意味着相机具有相同的电气和机械性能,他们的区别在于镜头或是否加了点阵发射器和红外灯。
振动结果
我们在振动压力测试前后测试了相机的以下参数,以确认相机性能是否有任何下降。(详细测试结果)
| 测试参数 | 描述 | 结果 |
|---|---|---|
| 相机对焦 | 检查相机的焦距(光学元件)是否发生了变化 | 通过 |
| 相机视角 | 检查相机的角度是否发生了变化(必须低于0.5°) | 通过 |
| 立体深度精度 | 检查相机的立体深度江都是否发生了变化(以mm为单位) | 通过 |
测试报告
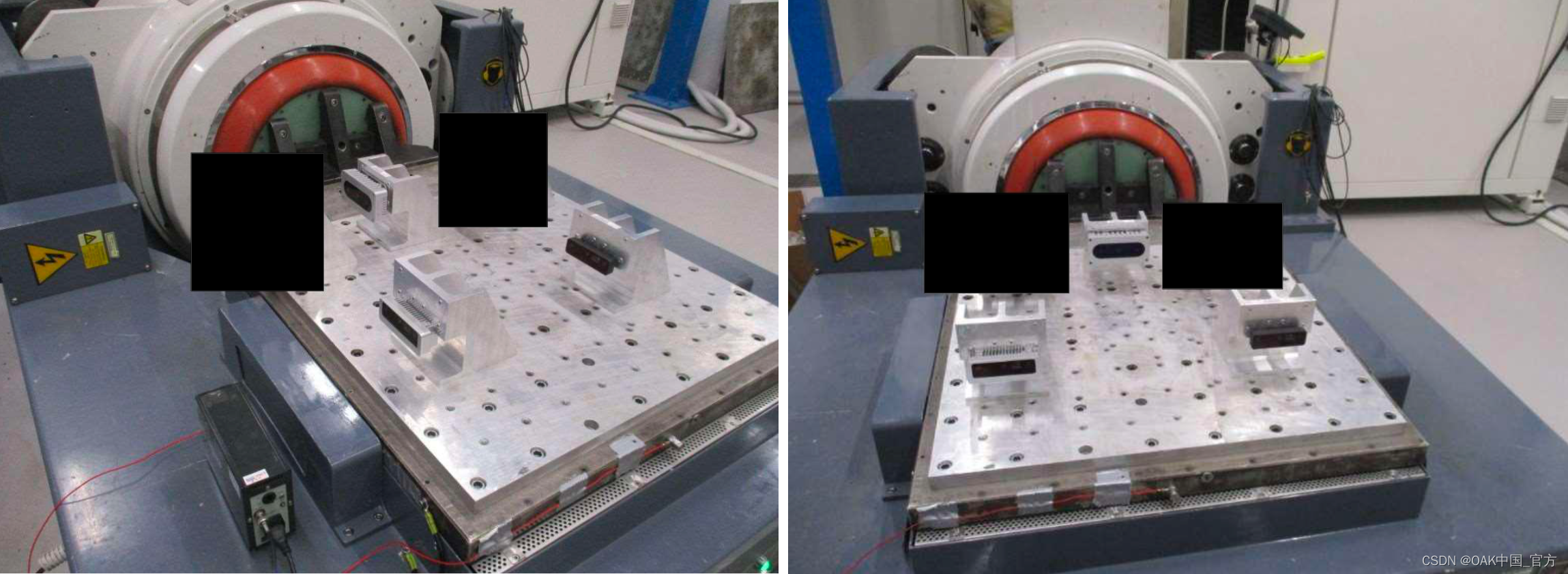
振动应力测试由独立的第三方测试实验室SIQ进行。根据EN 60068-2-6:2008标准,他们分别对所有 3 个轴(X、Y、Z)进行了5Hz 至200Hz 的1倍频程的正弦振动测试,加速度幅度为50m/s^2。(
)
此外,请继续关注我们将于2024年6月推出的 S4 产品,这些设备都将达到IP67等级,并且每个设备都可以选择使用USB或以太网连接。
OAK中国
| OpenCV AI Kit在中国区的官方代理商和技术服务商
| 追踪AI技术和产品新动态
戳「+关注」获取最新资讯↗↗
这篇关于OAK相机通过振动测试!的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





![业务中14个需要进行A/B测试的时刻[信息图]](https://img-blog.csdnimg.cn/img_convert/aeacc959fb75322bef30fd1a9e2e80b0.jpeg)


