本文主要是介绍视景仿真/虚拟仿真VR | 250万元一个的F35头盔显示器,究竟有多少黑科技?,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
战斗机是一种最先进的杀戮利器,集中了全人类的智慧,堪称工业技术的王冠,全世界几乎每隔15到20年就有一款划时代的机型出现,这些机型的特点都很明显,从外表就可以看出些征兆。每次战斗机换代,气动布局上都有重大突破。

▲F15是第一种三代机,气动外形特点不是很突出,但是内涵丰富,翼载低,推比高,格斗能力强
当然,除了外表,其实飞机座舱显示也有体现,从一代二代机时代的机械仪表,到三代机(F16)的部分电子仪表到四代机(F22)的多电子仪表,最终进化到五代机(F35),单个大屏显示器外加头盔显示器,超简洁明快。
从技术上来说,F16可算是三代机中划时代的产物,飞机采用了边条翼和电传飞控,外加30度大后倾座椅,座舱设计史无前例的采用了平显外加双杆操纵系统,使得飞机操纵作战效率比二代机有了指数级的提升,也成了全世界三代机和三代半的设计标杆。

▲F16战斗机率先使用平显和双杆操纵,配合水泡式无框风挡,三管齐下,无比拉风
F22替代F15成为新一代霸主,但是显示控制上进步不是特别大,和F16几乎一个套路:平显、电子仪表、双杆操纵、水泡式无框风挡,很有点不思进取的感觉,而且为了让飞行员得到足够的信息,飞机采用了平显和6块液晶显示屏显示速度高度姿态,导航、飞控、火控、燃油、敌我态势、电子战等等内容,由于追求高度信息化,所以F22增加了仪表板面积,比F16大的很多,但是代价也不小,座椅角度从F16的30度降低到13度。
座椅角度变小了,高过载耐受能力尽管随之降低,但F22是刺客,不是一种讲究狗斗的飞机,这也不是啥大不了的问题。
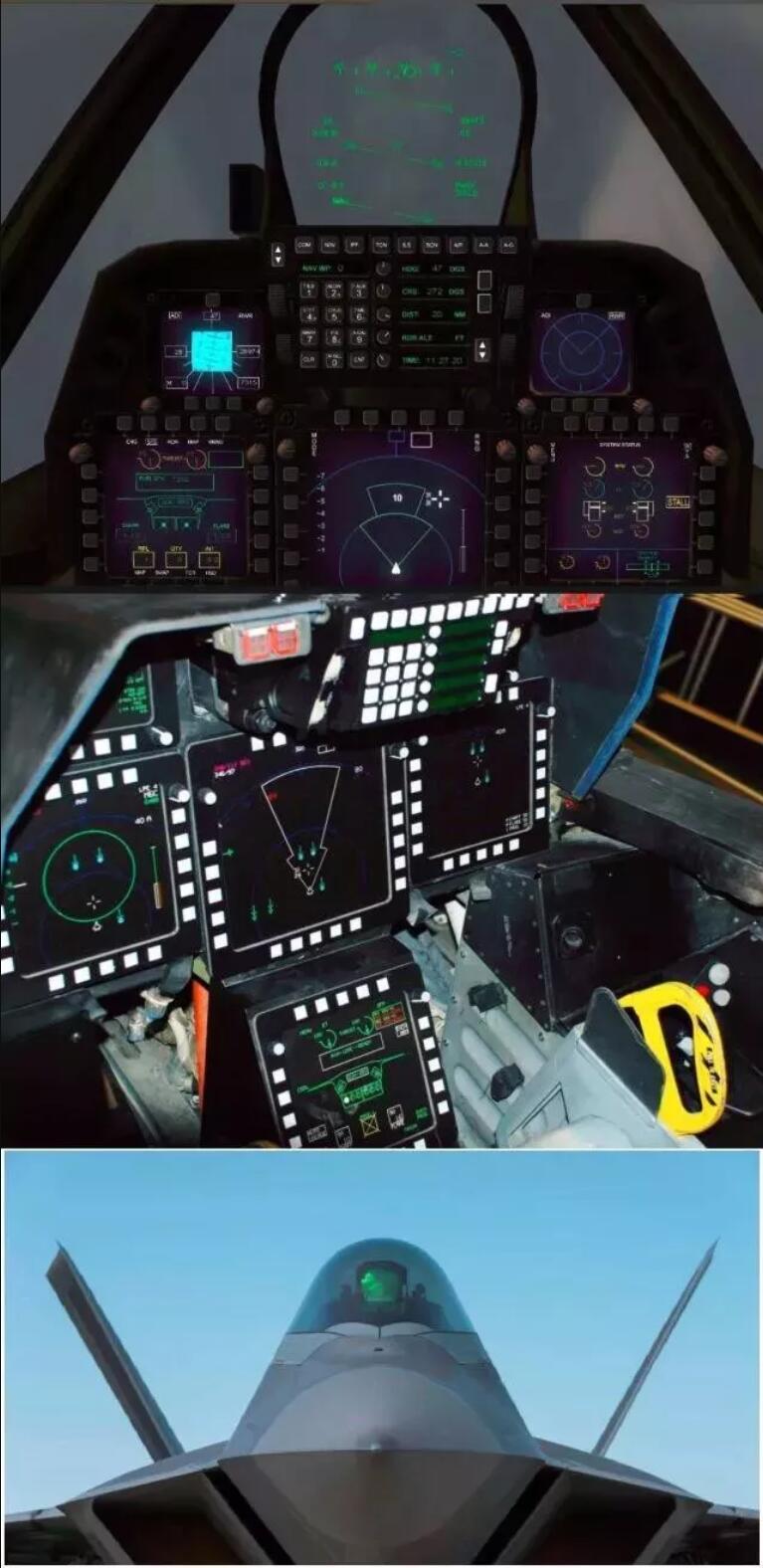
▲从显示控制来说,F22就是一个新时代的F16,平显电子仪表加水泡座舱,无敌海景房的感觉
当然,美国人为了四代机准备的嫁妆不是这么点,最早预研的时候,美国人还推出大图像座舱设计,飞机座舱就是一大块面板,当然F22没用上,遭到很多人的质疑。
说起显示、还有控制,传统的双杆操纵虽然高效,飞机的几百种菜单控制按钮功能,但是也不指望完全都集成到两杆上,塞不下啊,所以美国人还准备了触摸屏技术和声控技术,最终F22没用,但是欧洲的台风和阵风用了!
航空界都觉得洛马公司很糟糕,洛马公司声明,不是俺不想用,而是靠不住啊,飞行员飞9g哼哧哼哧的时候,声音娇喘不断,语音识别成啥样子,各位亲们,想一想吧!
触摸屏这个东西,空战中手忙脚乱的,无意中蹭了咋办?我还是老老实实的液晶屏幕加四周按钮吧,反正不使劲的话,铁定是没效果的。

▲阵风座舱,F35之下无敌,仪表简洁明快,触摸屏,准直中显,双杆操纵,30度后倾,口碑超屌
F22性能无敌,但是座舱显示控制很一般,和欧洲的三代半没有优势,尤其阵风战斗机,这变成了一个很大的笑话,到了新一代战斗机F35的时候,美国人按捺不住了,把F22上放弃的大手笔全部加上。

▲洛马公司在慎之又慎的嘲讽中出大招了,原来的单一屏幕大图像构思用上了!
F35战斗机座舱,和F16一样采用了很多划时代的技术,比如单块大屏幕显示,触摸屏技术,使用了头盔显示器取代平显,保持了双杆操纵,这个新招一出来,立即挽回了名声,锐意进取的洛马又回来了。
从技术含量来说,大屏幕和小屏幕区别不大,最让人心跳的就是头盔显示器,F35的头盔显示器有多重黑科技,从理论上来说,座舱的屏幕可以全部拆了,就要一个头盔。
头盔造价号称40万美元一个,人民币250万。

▲F35的头盔显示器,不仅仅显示效果好,而且头盔内型依照飞行头型定制,超豪华
说说黑科技,首先是3D效果,F35头盔采用了2根成像管,可以给飞行员提供立体图像。

▲F35采用了2个成像管,最终在面罩上成像,效果是立体的,兼容光电高清图像
F35的头盔不仅仅只有3D图像技术,还有3D声音技术,可以向飞行员实时发出警告,让飞行员直观的感觉到敌人导弹从哪个方向飞过来,是要爆头还是爆菊,提前做好准备,而不像普通飞机,导弹告警需要自己看屏幕动脑子找导弹的踪迹。
黑科技还有,飞行头盔自带夜视镜,免得飞行员到了天黑还要换夜视镜,加了夜视镜,头盔明显不平衡,飞起来很难受,做不了高机动。
▲飞行员过去作战都很头疼,天黑就要单独配夜视镜,麻烦死
而且,F35还利用信息技术,将机身6个环绕360度的光电头进行无缝连接处理,让飞行员直接可以穿透飞机看到整个飞机四周空域,不掉头也可以看到飞机背后,这是一个史无前例伟大的创举。
当然,好处很多,但是麻烦更多,实际飞行员使用起来,很好用,然而普遍觉得太重,压迫颈椎疼的很,而且显示器亮点很头疼,白天太阳直射太暗,夜里亮瞎眼,而且信号处理有延迟,看久了容易眼花头晕呕吐,和大家用谷歌眼睛类似。
从技术角度来说,F35的头盔显示器HMDS,牛不牛?
当然牛!这是F35显示设计最大亮点,全世界都追,中国差不多追上了。

▲中国歼20头盔变化,下面最新一款,已经具有头盔显示功能
完美不完美?
NO!NO!NO!远远谈不上完美,头盔功能太多,效果太好,但是太沉重,飞行员脖子吃不消。
有没有更完美的点子?
当然有,座舱全息成像,让飞行员的颈椎轻松起来。
简单点说就是头盔上就带一个简单的眼位跟踪功能,图像发生器和显示器不用装在飞行员头盔上,而是直接成像在座舱中间,立体成像,让飞行员脖子彻底解放出来,不用顶着4-5斤的大家伙忙碌。

▲这就是未来,座舱全息成像,丢掉沉重的头盔,让飞行员的脖子,爽飞起来
对了,我们的视景仿真/虚拟仿真图形工作站也更新了,扫码了解一下?!


这篇关于视景仿真/虚拟仿真VR | 250万元一个的F35头盔显示器,究竟有多少黑科技?的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








