本文主要是介绍雷达成像与实时处理 第一课笔记,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
注重完整性、构建知识框架>细学知识
2022秋季课程的课堂笔记
2022/9/9 雷达成像原理与实时处理 第一课
1 雷达介绍:


连续波雷达一般是双天线,脉冲雷达一般是单天线加双工器。
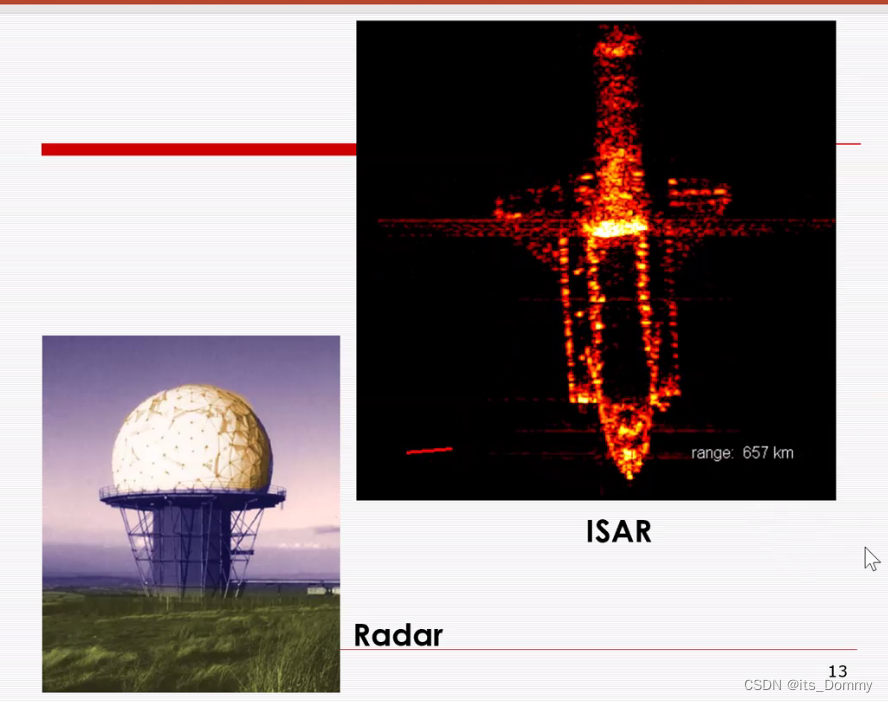
2 合成孔径雷达(SAR)介绍
距离分辨率:C/2B,二维高分辨,点->图像
*SAR灰度图像与光学图像的对比:SAR成像全天时全天候,更强的地表表征区分能力。互补
*SAR图像阴影,侧视导致;多图像叠加融合(不同角度)以消除阴影。
*按扫描方式分类

双站:前视 insar:高程信息
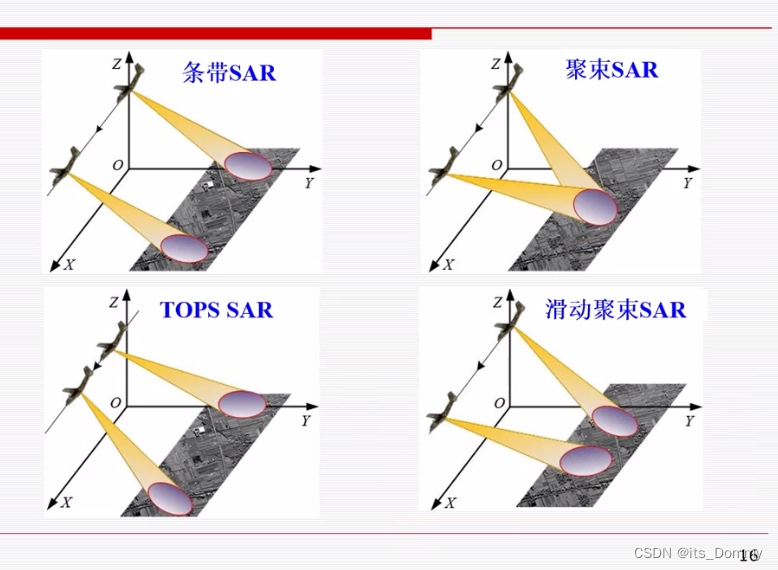
根据幅宽和分辨率要求选择不同模式SAR
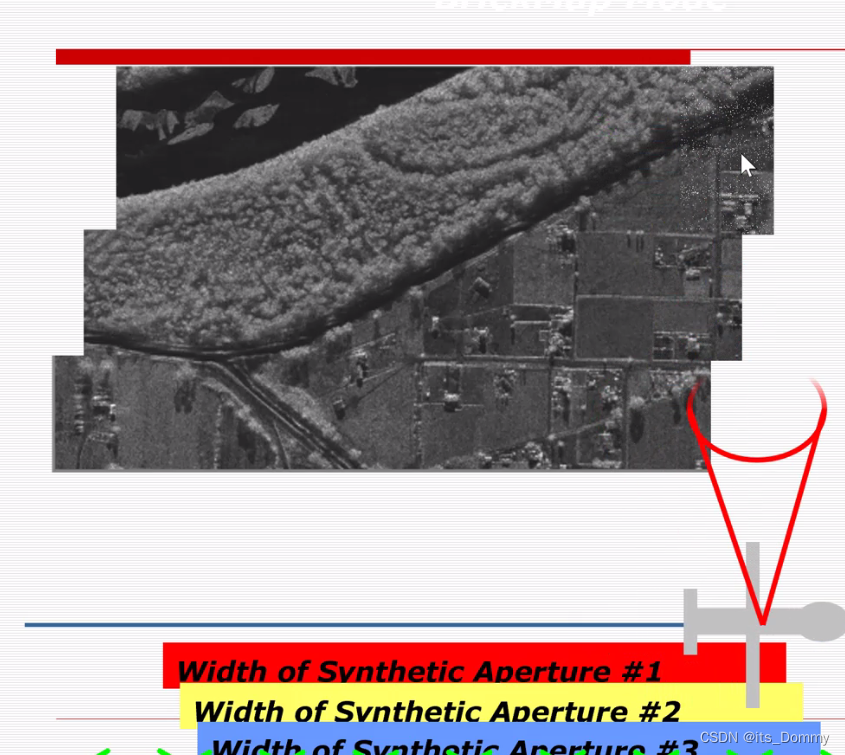
条带SAR方位分辨率Da/2;聚束SAR牺牲幅宽换取高分辨,方位分辨率<Da/2;滑动聚束折两者中。ScanSAR调整俯仰角,拼接,分辨率低于条带SAR,但大幅宽。
。
*按搭载平台:星载、机载(prerator,彩虹4,黑鹰)、弹载

单点距离向回波长度:一个脉宽Tp
单点方位向回波长度:天线方位孔径Da,方位波束宽度lambda/Da
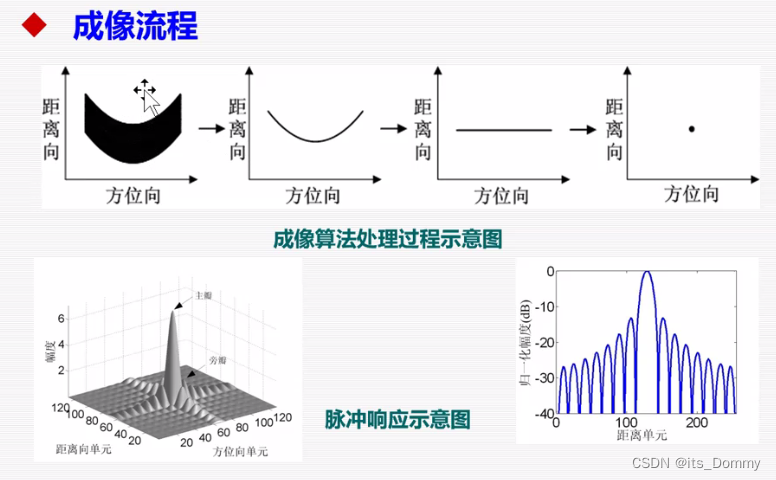
-->单点成像两维扩散
成像的本质:把两维扩散的支撑区重新聚焦为一个点
*SAR时间分辨率:1/B 距离分辨率:C/2B 方位分辨率:Da/2
注:方位分辨率与距离无关。(对比实孔径雷达方位向分辨率:theta*R,则距离越大方位向分辨率越低。)
这篇关于雷达成像与实时处理 第一课笔记的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








