本文主要是介绍关于 Altium Designer 板子挖孔 挖空 的正确做法 KeepOut 层 与机械层,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
标准的做法是
1 不要在机械层做任何外形定义
2在KeepOut层 先 画出框外形图,定义出板子外框
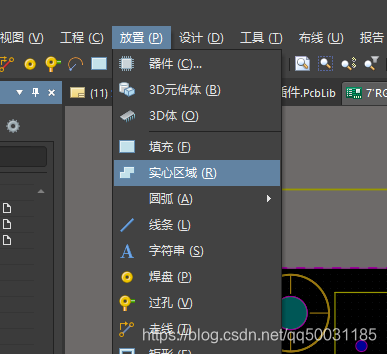
3 板内有挖空时 ,选择 放置 --实心区域
任一层放置好实心区域后, 然后选择属性, 在King属性中选择为 BoardCutout
选择后 所在层就会消失, 直接变成挖空属性 , 此时 在3D视图中可以看到效果
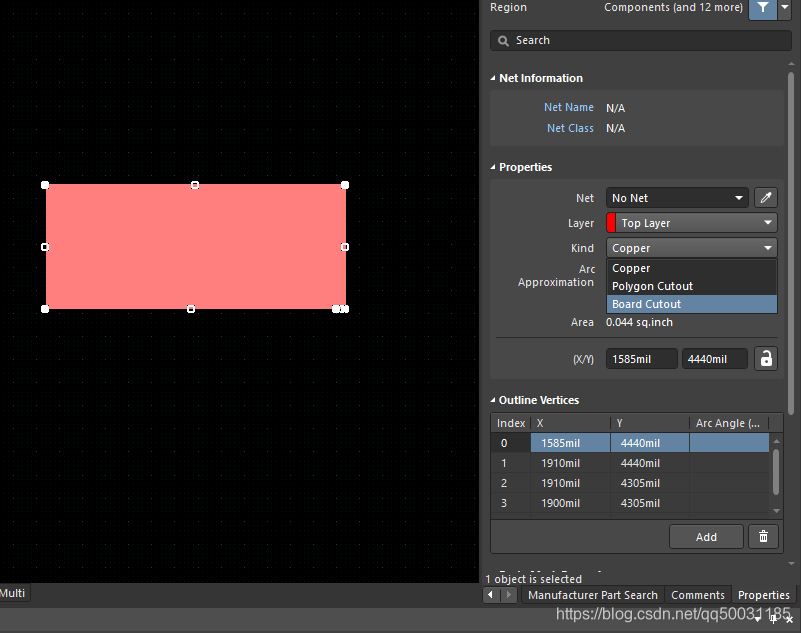
如下图所示
这篇关于关于 Altium Designer 板子挖孔 挖空 的正确做法 KeepOut 层 与机械层的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





