本文主要是介绍Coursera吴恩达课程笔记 3.1《构建机器学习项目》-- 机器学习策略(上),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 1. Why ML Strategy
- 2. Orthogonalization
- 3. Single number evaluation metric
- 4. Satisficing and Optimizing metic
- 5. Train/dev/test distributions
- 6. Size of the dev and test sets
- 7. When to change dev/test sets and metrics
- 8. Why human-level performance
- 9. Avoidable bias
- 10. Understanding human-level performance
- 11. Surpassing human-level performance
- 12. Improving your model performance
原文链接 https://blog.csdn.net/red_stone1/article/details/78519599
《Structuring Machine Learning Projects》(构建机器学习项目)这门课是Andrw Ng深度学习专项课程中的第三门课。这门课主要介绍机器学习中的一些策略和方法,让我们能够更快更有效地让机器学习系统工作,该门课共有两周的课时。
1. Why ML Strategy
当我们最初得到一个深度神经网络模型时,我们可能希望从很多方面来对它进行优化,例如:
- Collect more data
- Collect more diverse training set
- Train algorithm longer with gradient descent
- Try Adam instead of gradient descent
- Try bigger network
- Try smaller network
- Try dropout
- Add L2 regularization
- Network architecture: Activation functions, #hidden units…
可选择的方法很多,也很复杂、繁琐。盲目选择、尝试不仅耗费时间而且可能收效甚微。因此,使用快速、有效的策略来优化机器学习模型是非常必要的。
2. Orthogonalization
机器学习中有许多参数、超参数需要调试。通过每次只调试一个参数,保持其它参数不变,而得到的模型某一性能改变是一种最常用的调参策略,我们称之为正交化方法(Orthogonalization)。
Orthogonalization的核心在于每次调试一个参数只会影响模型的某一个性能。例如老式电视机旋钮,每个旋钮就对应一个功能,调整旋钮会调整对应的功能,而不会影响其它功能。也就是说彼此旋钮之间是互不影响的,是正交的,这也是Orthogonalization名称的由来。这种方法能够让我们更快更有效地进行机器学习模型的调试和优化。
对应到机器学习监督式学习模型中,可以大致分成四个独立的“功能”,每个“功能”对应一些可调节的唯一的旋钮。四个“功能”如下:
- Fit training set well on cost function
- Fit dev set well on cost function
- Fit test set well on cost function
- Performs well in real world
其中,第一条优化训练集可以通过使用更复杂NN,使用Adam等优化算法来实现;第二条优化验证集可以通过正则化,采用更多训练样本来实现;第三条优化测试集可以通过使用更多的验证集样本来实现;第四条提升实际应用模型可以通过更换验证集,使用新的cost function来实现。概括来说,每一种“功能”对应不同的调节方法。而这些调节方法(旋钮)只会对应一个“功能”,是正交的。
顺便提一下,early stopping在模型功能调试中并不推荐使用。因为early stopping在提升验证集性能的同时降低了训练集的性能。也就是说early stopping同时影响两个“功能”,不具有独立性、正交性。
3. Single number evaluation metric
构建、优化机器学习模型时,单值评价指标非常必要。有了量化的单值评价指标后,我们就能根据这一指标比较不同超参数对应的模型的优劣,从而选择最优的那个模型。
举个例子,比如有A和B两个模型,它们的准确率(Precision)和召回率(Recall)分别如下:
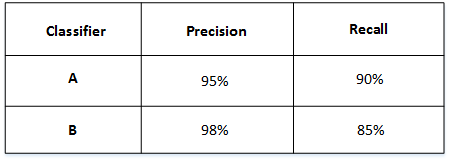
如果只看Precision的话,B模型更好。如果只看Recall的话,A模型更好。实际应用中,我们通常使用单值评价指标F1 Score来评价模型的好坏。F1 Score综合了Precision和Recall的大小,计算方法如下:
F 1 = 2 ⋅ P ⋅ R P + R F1=\frac{2\cdot P\cdot R}{P+R} F1=P+R2⋅P⋅R
然后得到了A和B模型各自的F1 Score:
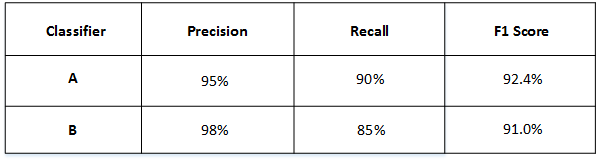
从F1 Score来看,A模型比B模型更好一些。通过引入单值评价指标F1 Score,很方便对不同模型进行比较。
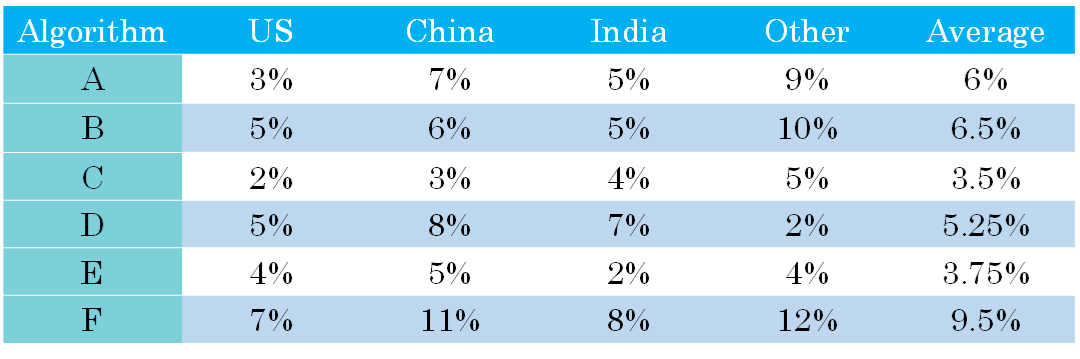
除了F1 Score之外,我们还可以使用平均值作为单值评价指标来对模型进行评估。如下图所示,A, B, C, D, E, F六个模型对不同国家样本的错误率不同,可以计算其平均性能,然后选择平均错误率最小的那个模型(C模型)。
4. Satisficing and Optimizing metic
有时候,要把所有的性能指标都综合在一起,构成单值评价指标是比较困难的。解决办法是,我们可以把某些性能作为优化指标(Optimizing metic),寻求最优化值;而某些性能作为满意指标(Satisficing metic),只要满足阈值就行了。
举个猫类识别的例子,有A,B,C三个模型,各个模型的Accuracy和Running time如下表中所示:
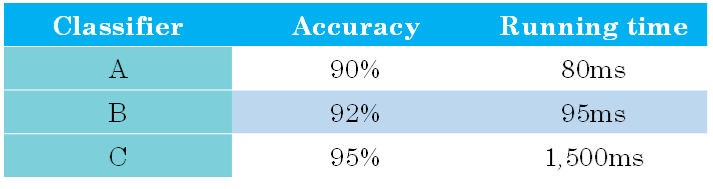
Accuracy和Running time这两个性能不太合适综合成单值评价指标。因此,我们可以将Accuracy作为优化指标(Optimizing metic),将Running time作为满意指标(Satisficing metic)。也就是说,给Running time设定一个阈值,在其满足阈值的情况下,选择Accuracy最大的模型。如果设定Running time必须在100ms以内,那么很明显,模型C不满足阈值条件,首先剔除;模型B相比较模型A而言,Accuracy更高,性能更好。
概括来说,性能指标(Optimizing metic)是需要优化的,越优越好;而满意指标(Satisficing metic)只要满足设定的阈值就好了。
5. Train/dev/test distributions
Train/dev/test sets如何设置对机器学习的模型训练非常重要,合理设置能够大大提高模型训练效率和模型质量。
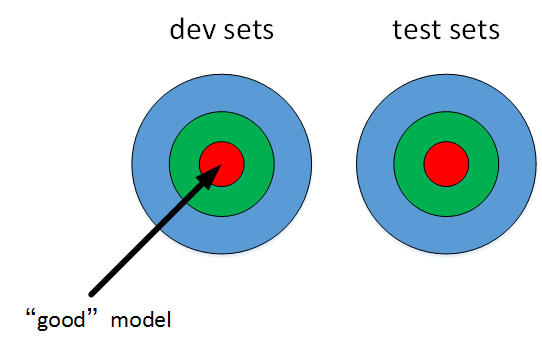
原则上应该尽量保证dev sets和test sets来源于同一分布且都反映了实际样本的情况。如果dev sets和test sets不来自同一分布,那么我们从dev sets上选择的“最佳”模型往往不能够在test sets上表现得很好。这就好比我们在dev sets上找到最接近一个靶的靶心的箭,但是我们test sets提供的靶心却远远偏离dev sets上的靶心,结果这支肯定无法射中test sets上的靶心位置。
6. Size of the dev and test sets
在之前的课程中我们已经介绍过,当样本数量不多(小于一万)的时候,通常将Train/dev/test sets的比例设为60%/20%/20%,在没有dev sets的情况下,Train/test sets的比例设为70%/30%。当样本数量很大(百万级别)的时候,通常将相应的比例设为98%/1%/1%或者99%/1%。
对于dev sets数量的设置,应该遵循的准则是通过dev sets能够检测不同算法或模型的区别,以便选择出更好的模型。
对于test sets数量的设置,应该遵循的准则是通过test sets能够反映出模型在实际中的表现。
实际应用中,可能只有train/dev sets,而没有test sets。这种情况也是允许的,只要算法模型没有对dev sets过拟合。但是,条件允许的话,最好是有test sets,实现无偏估计。
7. When to change dev/test sets and metrics
算法模型的评价标准有时候需要根据实际情况进行动态调整,目的是让算法模型在实际应用中有更好的效果。
举个猫类识别的例子。初始的评价标准是错误率,算法A错误率为3%,算法B错误率为5%。显然,A更好一些。但是,实际使用时发现算法A会通过一些色情图片,但是B没有出现这种情况。从用户的角度来说,他们可能更倾向选择B模型,虽然B的错误率高一些。这时候,我们就需要改变之前单纯只是使用错误率作为评价标准,而考虑新的情况进行改变。例如增加色情图片的权重,增加其代价。
原来的cost function:
J = 1 m ∑ i = 1 m L ( y ^ ( i ) , y ( i ) ) J=\frac1m\sum_{i=1}^mL(\hat y^{(i)},y^{(i)}) J=m1i=1∑mL(y^(i),y(i))
更改评价标准后的cost function:
J = 1 w ( i ) ∑ i = 1 m w ( i ) L ( y ^ ( i ) , y ( i ) ) J=\frac{1}{w^{(i)}}\sum_{i=1}^mw^{(i)}L(\hat y^{(i)},y^{(i)}) J=w(i)1i=1∑mw(i)L(y^(i),y(i))
w ( i ) = { 1 , x ( i ) i s n o n − p o r n 10 , x ( i ) i s p o r n w^{(i)}=\begin{cases} 1, & x^{(i)}\ is\ non-porn\\ 10, & x^{(i)}\ is\ porn \end{cases} w(i)={1,10,x(i) is non−pornx(i) is porn
概括来说,机器学习可分为两个过程:
- Define a metric to evaluate classifiers
- How to do well on this metric
也就是说,第一步是找靶心,第二步是通过训练,射中靶心。但是在训练的过程中可能会根据实际情况改变算法模型的评价标准,进行动态调整。
另外一个需要动态改变评价标准的情况是dev/test sets与实际使用的样本分布不一致。比如猫类识别样本图像分辨率差异。

8. Why human-level performance
机器学习模型的表现通常会跟人类水平表现作比较,如下图所示:
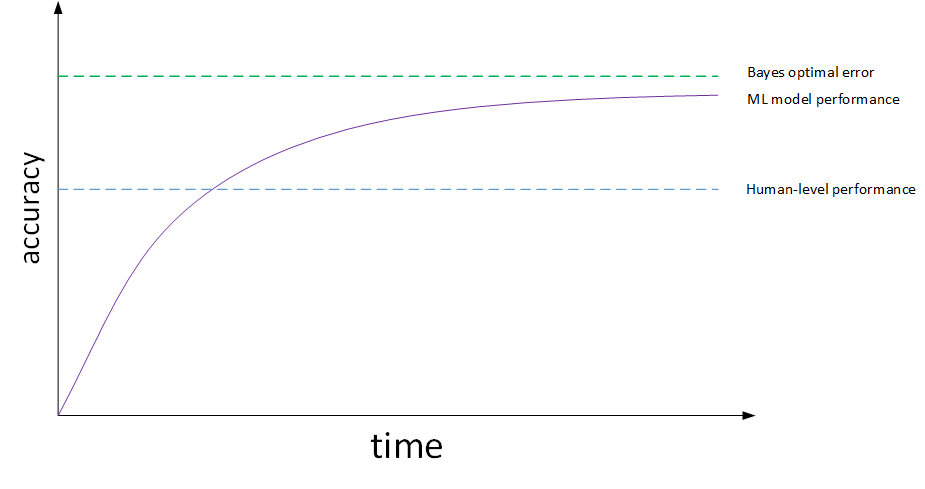
图中,横坐标是训练时间,纵坐标是准确性。机器学习模型经过训练会不断接近human-level performance甚至超过它。但是,超过human-level performance之后,准确性会上升得比较缓慢,最终不断接近理想的最优情况,我们称之为bayes optimal error。理论上任何模型都不能超过它,bayes optimal error代表了最佳表现。
实际上,human-level performance在某些方面有不俗的表现。例如图像识别、语音识别等领域,人类是很擅长的。所以,让机器学习模型性能不断接近human-level performance非常必要也做出很多努力:
Get labeled data from humans.
Gain insight from manual error analysis: Why did a person get this right?
Better analysis of bias/variance.
9. Avoidable bias
实际应用中,要看human-level error,training error和dev error的相对值。例如猫类识别的例子中,如果human-level error为1%,training error为8%,dev error为10%。由于training error与human-level error相差7%,dev error与training error只相差2%,所以目标是尽量在训练过程中减小training error,即减小偏差bias。如果图片很模糊,肉眼也看不太清,human-level error提高到7.5%。这时,由于training error与human-level error只相差0.5%,dev error与training error只相差2%,所以目标是尽量在训练过程中减小dev error,即方差variance。这是相对而言的。
对于物体识别这类CV问题,human-level error是很低的,很接近理想情况下的bayes optimal error。因此,上面例子中的1%和7.5%都可以近似看成是两种情况下对应的bayes optimal error。实际应用中,我们一般会用human-level error代表bayes optimal error。
通常,我们把training error与human-level error之间的差值称为bias,也称作avoidable bias;把dev error与training error之间的差值称为variance。根据bias和variance值的相对大小,可以知道算法模型是否发生了欠拟合或者过拟合。
10. Understanding human-level performance
我们说过human-level performance能够代表bayes optimal error。但是,human-level performance如何定义呢?举个医学图像识别的例子,不同人群的error有所不同:
- Typical human : 3% error
- Typical doctor : 1% error
- Experienced doctor : 0.7% error
- Team of experienced doctors : 0.5% error
不同人群他们的错误率不同。一般来说,我们将表现最好的那一组,即Team of experienced doctors作为human-level performance。那么,这个例子中,human-level error就为0.5%。但是实际应用中,不同人可能选择的human-level performance基准是不同的,这会带来一些影响。
假如该模型training error为0.7%,dev error为0.8。如果选择Team of experienced doctors,即human-level error为0.5%,则bias比variance更加突出。如果选择Experienced doctor,即human-level error为0.7%,则variance更加突出。也就是说,选择什么样的human-level error,有时候会影响bias和variance值的相对变化。当然这种情况一般只会在模型表现很好,接近bayes optimal error的时候出现。越接近bayes optimal error,模型越难继续优化,因为这时候的human-level performance可能是比较模糊难以准确定义的。
11. Surpassing human-level performance
对于自然感知类问题,例如视觉、听觉等,机器学习的表现不及人类。但是在很多其它方面,机器学习模型的表现已经超过人类了,包括:
- Online advertising
- Product recommendations
- Logistics(predicting transit time)
- Loan approvals
实际上,机器学习模型超过human-level performance是比较困难的。但是只要提供足够多的样本数据,训练复杂的神经网络,模型预测准确性会大大提高,很有可能接近甚至超过human-level performance。值得一提的是当算法模型的表现超过human-level performance时,很难再通过人的直觉来解决如何继续提高算法模型性能的问题。
12. Improving your model performance
提高机器学习模型性能主要要解决两个问题:avoidable bias和variance。我们之前介绍过,training error与human-level error之间的差值反映的是avoidable bias,dev error与training error之间的差值反映的是variance。
解决avoidable bias的常用方法包括:
- Train bigger model
- Train longer/better optimization algorithms: momentum, RMSprop, Adam
- NN architecture/hyperparameters search
解决variance的常用方法包括:
- More data
- Regularization: L2, dropout, data augmentation
- NN architecture/hyperparameters search
这篇关于Coursera吴恩达课程笔记 3.1《构建机器学习项目》-- 机器学习策略(上)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






