本文主要是介绍96-基于stm32单片机多功能宠物定时自动喂食器Proteus仿真+程序源码,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一:功能介绍
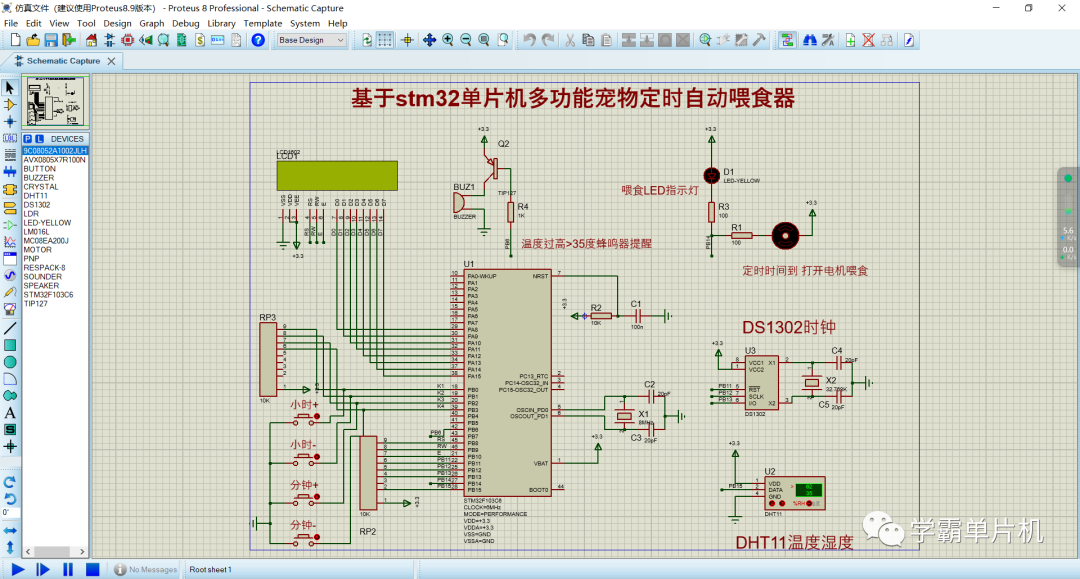
1、采用stm32单片机+LCD1602+DHT11温湿度传感器+DS1302传感器+按键+蜂鸣器+LED灯+电机,制作一个多功能可显示温湿度、光照强度的可调时钟闹钟;
2、通过按键设置喂食定时的小时和分钟;当定时时间到,LED闪烁提醒,打开喂食电机进行喂食;
3、该多功能喂食器可以采集温湿度,当温度大于一定值,蜂鸣器报警提醒高温环境;
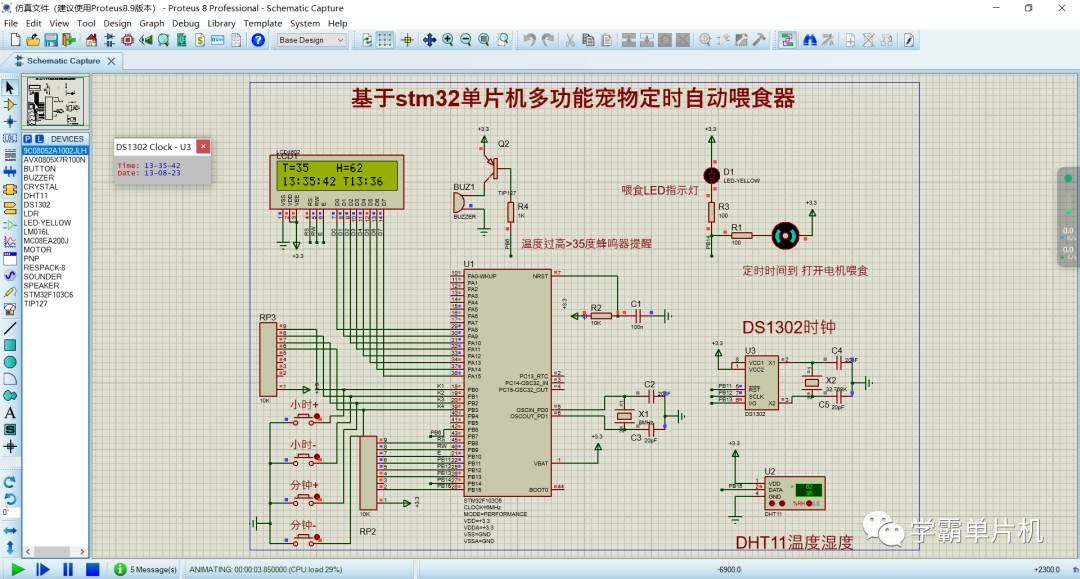
4、LCD1602显示ds1302时钟的时间和采集的温湿度、定时时间;
二:仿真演示视频+程序简要讲解:(程序有中文注释,新手容易看懂)
96-基于stm32单片机多功能宠物定时自动喂食器Proteus仿真+程序源码+讲解视频
三:设计软件介绍
本设计使用C语言编程设计,程序代码采用keil5编写,程序有中文注释,新手容易看懂,仿真采用Proteus软件进行仿真,演示视频使用的是Proteus8.9版本;资料包里有相关软件包,可自行下载安装。
四:程序打开方法
特别注意:下载资料包以后一定要先解压!!!(建议解压到桌面上,文件路径太深会导致程序打开异常),解压后再用keil5打开。
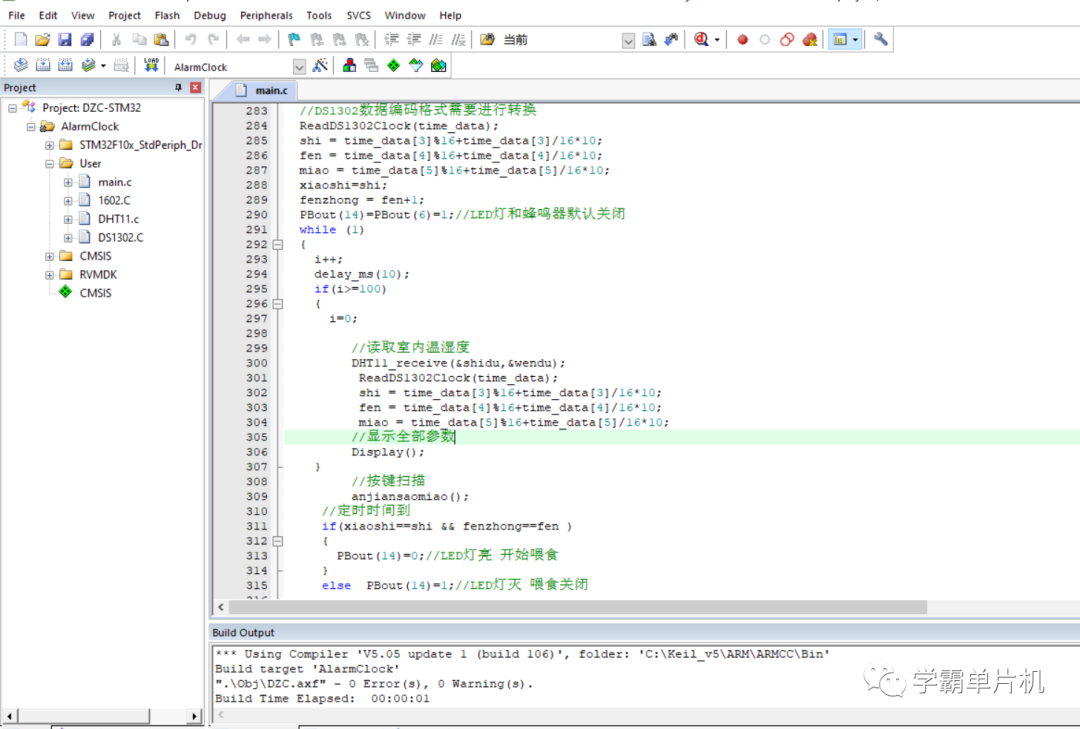
程序部分展示,有中文注释,新手容易看懂
//T1 温度WrByte1602(0,0,'T'); //.WrByte1602(0,1,'='); //. WrByte1602(0,2,AsciiCode[wendu%100/10]);WrByte1602(0,3,AsciiCode[wendu%10]);WrByte1602(0,4,' '); //T2 湿度WrByte1602(0,8,'H'); //.WrByte1602(0,9,'='); //. WrByte1602(0,10,AsciiCode[shidu%100/10]);WrByte1602(0,11,AsciiCode[shidu%10]);WrByte1602(0,12,' '); xxx=0;yyy=1;WrByte1602(yyy,xxx++,AsciiCode[shi%100/10]);//时间显示WrByte1602(yyy,xxx++,AsciiCode[shi%10]);WrByte1602(yyy,xxx++,':'); WrByte1602(yyy,xxx++,AsciiCode[fen%100/10]);WrByte1602(yyy,xxx++,AsciiCode[fen%10]);WrByte1602(yyy,xxx++,':'); WrByte1602(yyy,xxx++,AsciiCode[miao%100/10]);WrByte1602(yyy,xxx++,AsciiCode[miao%10]);WrByte1602(yyy,xxx++,' '); //定时显示WrByte1602(yyy,xxx++,'T'); WrByte1602(yyy,xxx++,AsciiCode[xiaoshi%100/10]);WrByte1602(yyy,xxx++,AsciiCode[xiaoshi%10]);WrByte1602(yyy,xxx++,':'); WrByte1602(yyy,xxx++,AsciiCode[fenzhong%100/10]);WrByte1602(yyy,xxx++,AsciiCode[fenzhong%10]);WrByte1602(yyy,xxx++,' '); }int main(void)
{ char i=0;//时钟配置SystemInit(); SystemCoreClockUpdate();//引脚配置GPIO_Configuration();//LCD1602初始化Init1602();NVICConfig();//RCC时钟开启RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);DS1302_Configuration(); //DS1302数据编码格式需要进行转换ReadDS1302Clock(time_data); shi = time_data[3]%16+time_data[3]/16*10;fen = time_data[4]%16+time_data[4]/16*10; miao = time_data[5]%16+time_data[5]/16*10; xiaoshi=shi;fenzhong = fen+1;PBout(14)=PBout(6)=1;//LED灯和蜂鸣器默认关闭while (1){ i++;delay_ms(10);if(i>=100){ i=0; //读取室内温湿度DHT11_receive(&shidu,&wendu);ReadDS1302Clock(time_data); shi = time_data[3]%16+time_data[3]/16*10;fen = time_data[4]%16+time_data[4]/16*10; miao = time_data[5]%16+time_data[5]/16*10; //显示全部参数Display(); }//按键扫描anjiansaomiao();//定时时间到if(xiaoshi==shi && fenzhong==fen ){PBout(14)=0;//LED灯亮 开始喂食}else PBout(14)=1;//LED灯灭 喂食关闭if(wendu>35) PBout(6)=0;//环境温度过高 蜂鸣器提醒else PBout(6)=1;}五:仿真文件(采用Proteus打开)

六:资料清单展示(文件中包含的相关资料)
百度云盘资料下载链接
这篇关于96-基于stm32单片机多功能宠物定时自动喂食器Proteus仿真+程序源码的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


