本文主要是介绍vasp-Lev00编译,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
LEV00 - a useful tool for various DFT codes (VASP, SIESTA, CASTEP, QUICKSTEP)
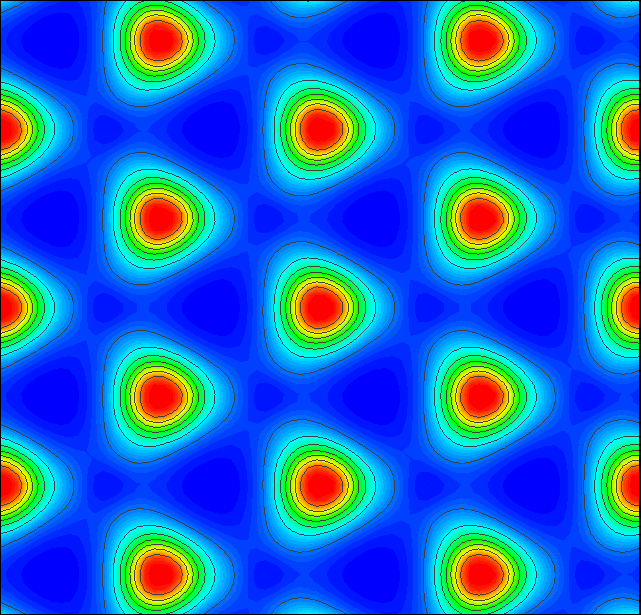
Lev00 虽然有很多不同的功能,但是我们一般只用它处理电荷密度,来生成更容易理解的科研绘图。
例如:
如何安装LEV00?
-
下载LEV00,点击lev00即可下载。下载链接为:https://nms.kcl.ac.uk/lev.kantorovitch/codes/lev00/index.html
-
安装过程:
-
tar zxvf lev00_4.01-forusers.tgz
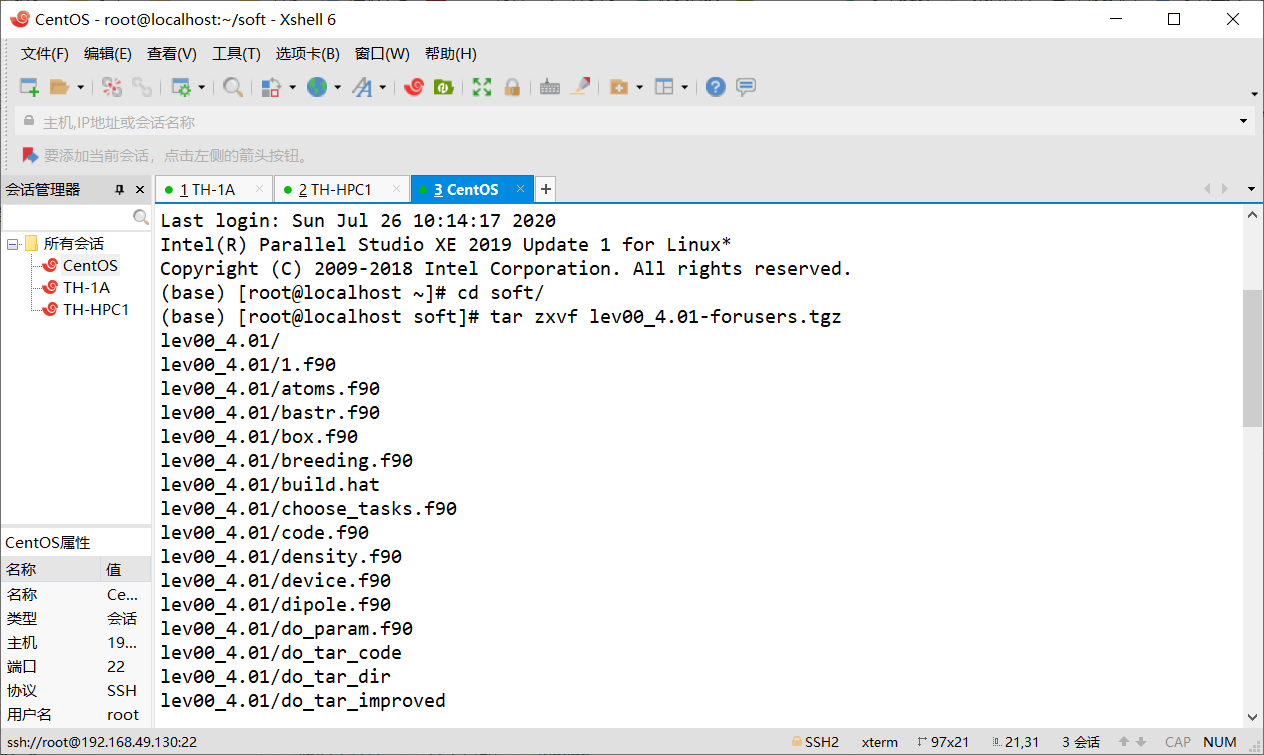
-
cd lev00_4.01/
-
vi Makefile
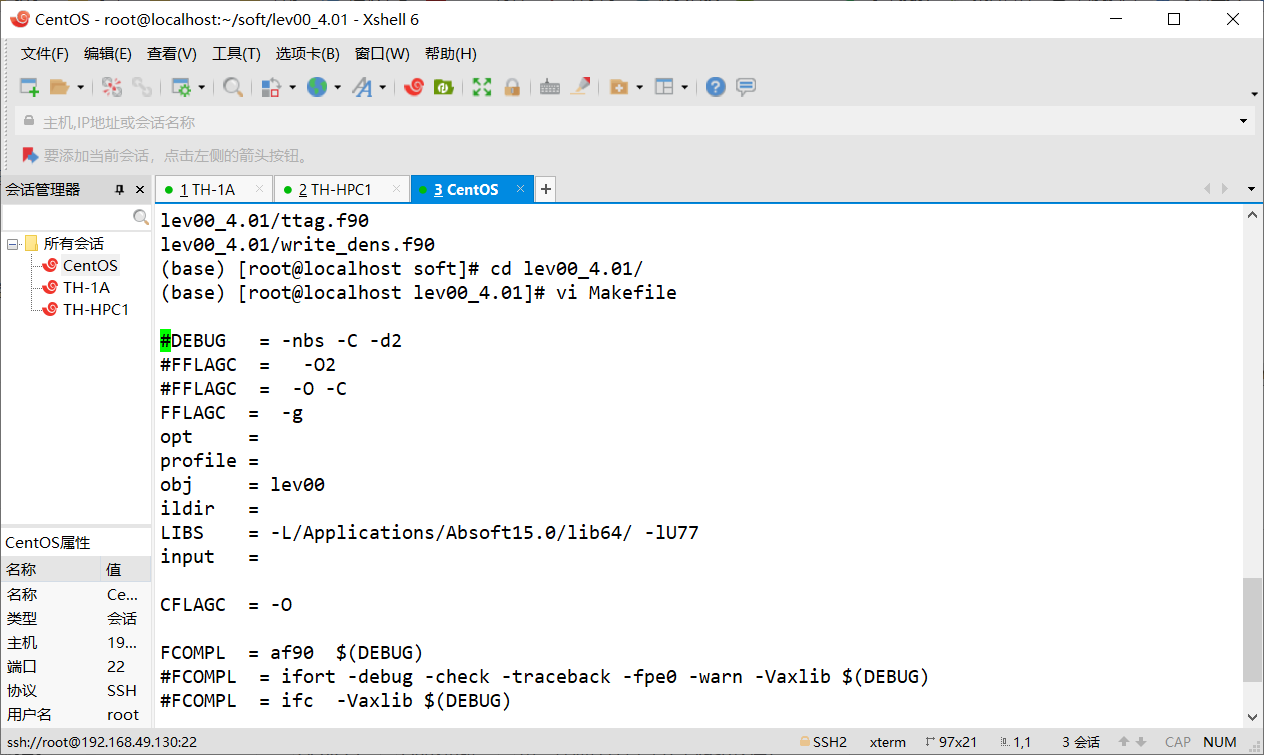
-
修改:#LIBS = -L/Applications/Ab
这篇关于vasp-Lev00编译的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








