本文主要是介绍【Autosar】MCAL - PORT(NXP - S32K14x),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- MCAL - PORT(NXP - S32K14x)
- 1. 概述
- 2. API
- 3. 配置介绍
- 3.1 配置项
- 3.2 General
- 3.2.1 NotUsedPortPin
- 3.2.2 PortGeneral
- 3.3 引脚配置
- 3.3.1 PortContainer
- 3.3.2 PortPin
MCAL - PORT(NXP - S32K14x)
MCAL - 汇总
配置工具:EB Tresos Studio
芯片类型:S32K146
1. 概述
Port模块主要功能在于芯片引脚的配置。
2. API
| 函数 | 描述 |
|---|---|
| Port_Init | Port模块初始化 |
| Port_SetPinDirection | 设置引脚方向 |
| Port_RefreshPortDirection | 刷新引脚方向配置 |
| Port_GetVersionInfo | 获取Port模块版本号 |
| Port_SetPinMode | 设置引脚模式 |
3. 配置介绍
3.1 配置项
PortPin Mode:引脚模式
PortPin Direction:引脚输入/输出方向
PortPin Level Value:引脚输出电平
PortPin DSE:引脚驱动能力

PortPin PE:上拉/下拉使能

PortPin PS:上拉/下拉

PortPin Pcr:引脚对应寄存器序号
针对不同的芯片,参考手册已经给出了每个端口可用的引脚数。这里要注意的是每个端口都是有32个PCR寄存器,各芯片启用都是不一致的,例如s32k146的PORT A只是启用了32个中的25个。各个芯片具体的配置可以在S32K-RM参考手册的附件中找到。
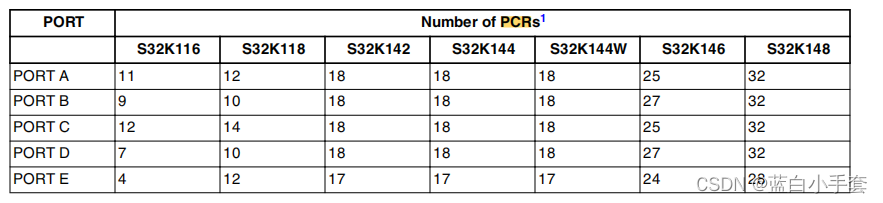
计算方式:pcr index = 32 * (PORT Index) + Pin
示例:PTE3 = 32 * 4 + 3 = 131
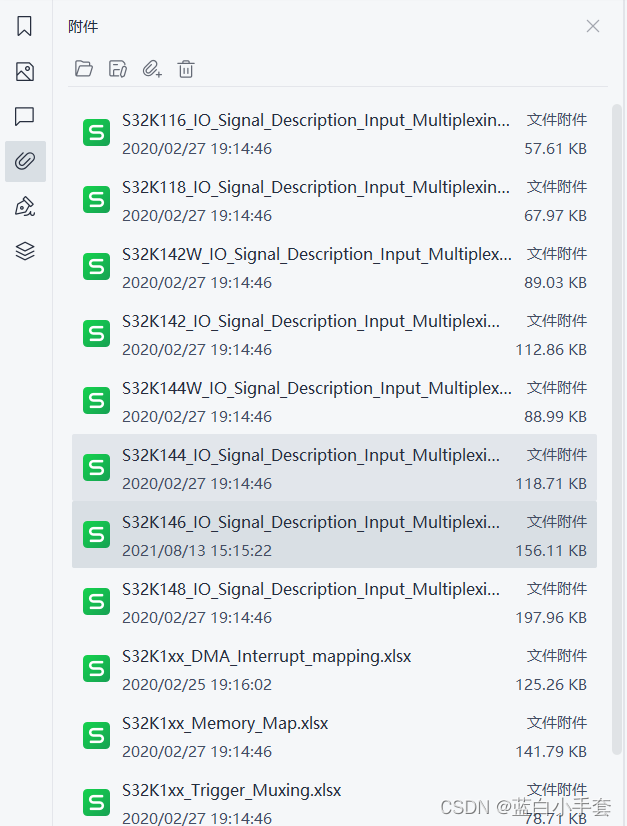
如下图所示,在【S32K-RM.pdf】附件中可以找到对应芯片的引脚功能。
3.2 General
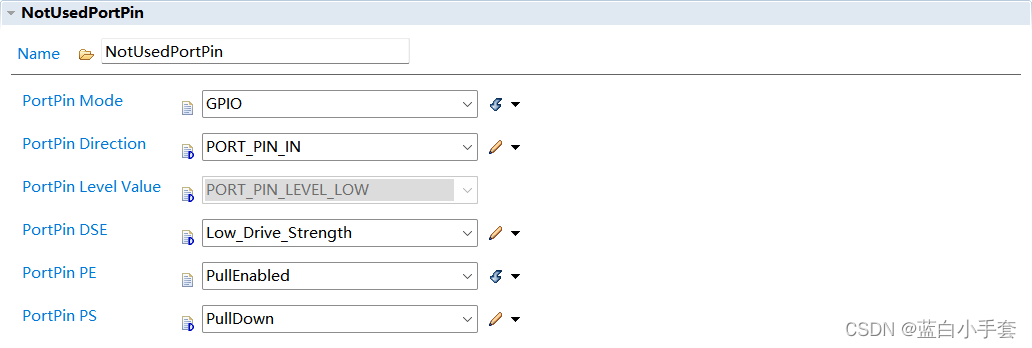
3.2.1 NotUsedPortPin
该部分是为了统一配置未使用的端口。为了降低MCU功耗,可以设置成以下配置:
3.2.2 PortGeneral
该部分是使能Api,根据需求开启或关闭
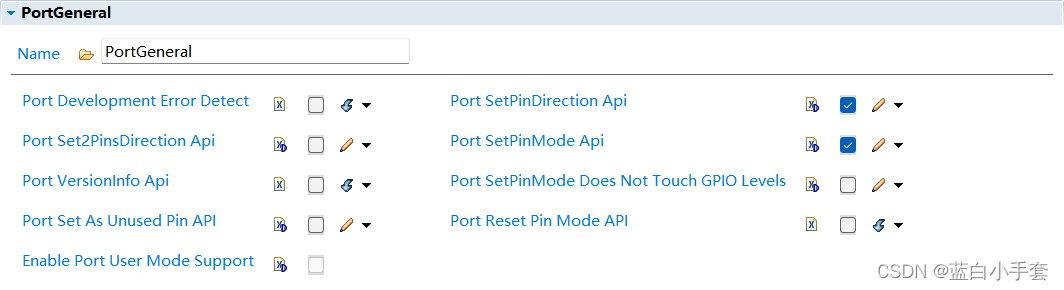
Port SetPinMode Does Not Touch GPIO Levels:设置引脚模式时不将引脚电平设置为初始值
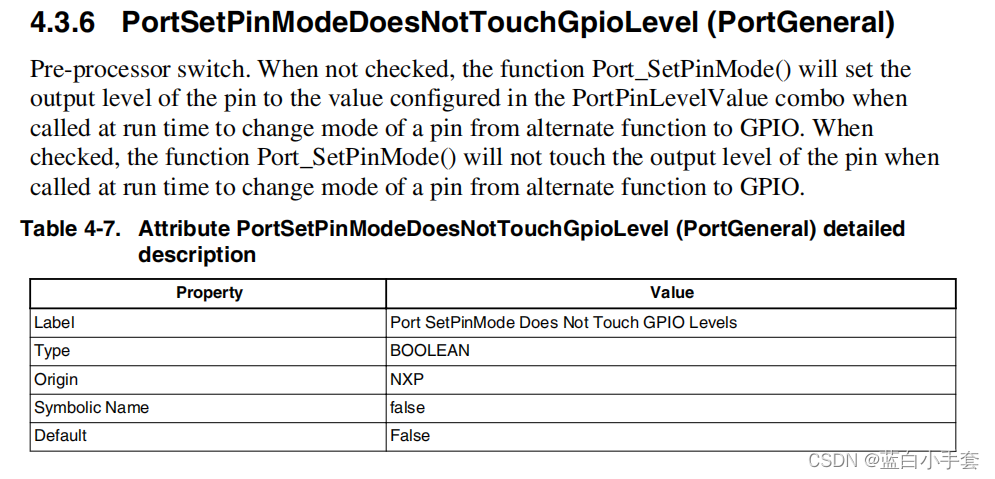
在Port_Ipw_SetPinMode函数中可以看到下面这段代码,当引脚配置为输出模式的时候,若Port SetPinMode Does Not Touch GPIO Levels为false,则会将输出电平配置为PortPin Level Value设置的状态。
#if (STD_OFF == PORT_SETPINMODE_DOES_NOT_TOUCH_GPIO_LEVEL)
if((PORT_PIN_IN != ePadDirection) && (PORT_PIN_HIGH_Z != ePadDirection))
{Port_Port_Ci_SetGpioPadOutput(PinIndex, pConfigPtr);
}
#endif /* (STD_OFF == PORT_SETPINMODE_DOES_NOT_TOUCH_GPIO_LEVEL) */
3.3 引脚配置
3.3.1 PortContainer
PortContainer只是一个容器,为了让可以理解为一个目录,为了方便快速找到配置的引脚,对引脚做分类管理。例如我这里建了一个GPIO容器,该容器里面专门配置GPIO模式的引脚,然后建了一个JTAG的容器,该容器里面专门配置JTAG引脚。
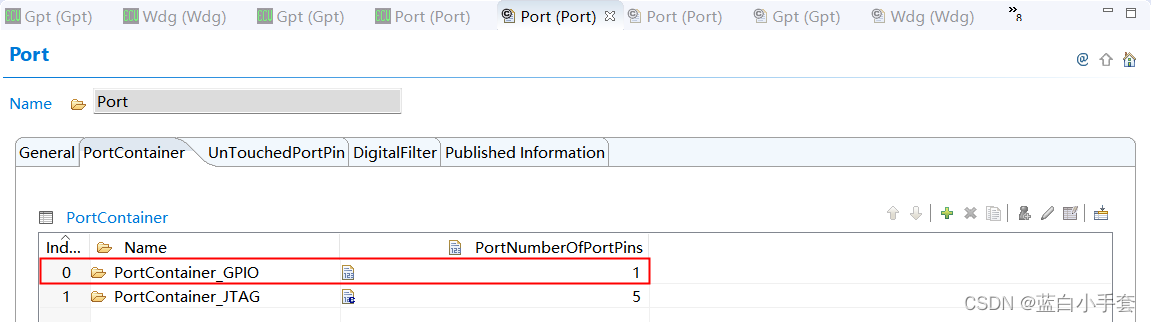
配置完引脚后,记得刷新容器中的引脚个数
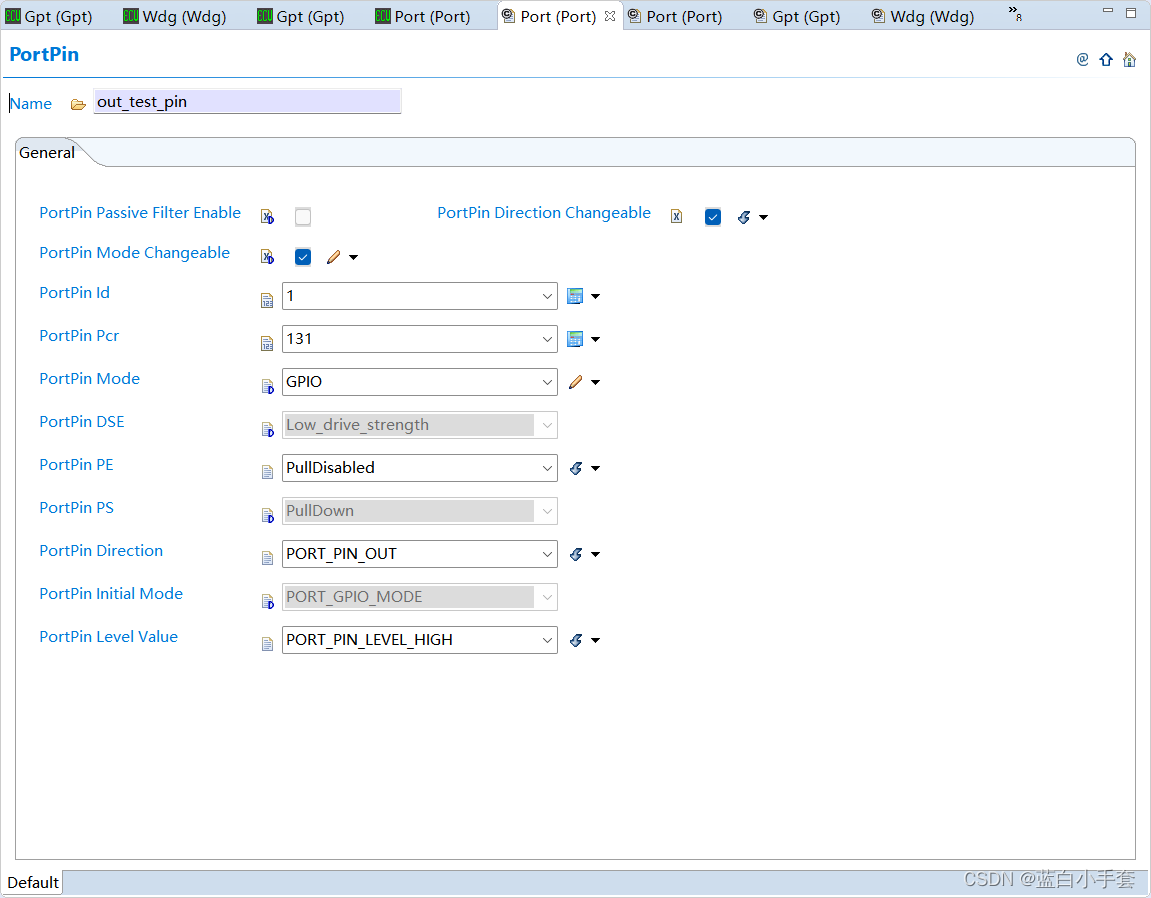
3.3.2 PortPin
该部分用于引脚配置,在PortPin中可以创建引脚配置,双击序号进入详细配置。

在详细配置界面中配置引脚的PCR序号、引脚模式、上拉/下拉、引脚方向、引脚输出电平。
示例:PTE3 输出高电平:
PortPin Direction Changeable:是否能修改引脚方向(前提是勾选Port Development Error Detect )
在Port_Port_Ci_SetPinDirection函数中可以看到如下代码,bDC就是该配置项配置的值,在设置引脚方向之前会先判断这个值。
#if (STD_ON == PORT_DEV_ERROR_DETECT)/* Check the Direction changeability option *//* @violates @ref Port_Port_Ci_C_REF_7 Violates MISRA 2004 Required Rule 17.4 */if (((boolean)TRUE == pConfigPtr->pUsedPadConfig[PinIndex].bDC) || ((uint16)0 != (u16PinChangeDirFlagWord & (uint16)(1UL<<u8PinDescBitOffset)))){
#endif /* (STD_ON == PORT_DEV_ERROR_DETECT) *//* Enter critical region */SchM_Enter_Port_PORT_EXCLUSIVE_AREA_03();/* Configures Port Pin as Output */if (PORT_PIN_OUT == eDirection){/* @violates @ref Port_Port_Ci_C_REF_5 Violates MISRA 2004 Required Rule 11.1, cast from unsigned long to pointer. *//* @violates @ref Port_Port_Ci_C_REF_10 A cast should not be performed between a pointer type and an integral type. */REG_BIT_SET32(GPIO_PDDR_ADDR32(GPIO_PORT_U32(Pin)), (uint32)(1UL << GPIO_CHANNEL_U32(Pin)));}/* Configures Port Pin as Input or High-Z*/else if ((PORT_PIN_IN == eDirection) || (PORT_PIN_HIGH_Z == eDirection)){/* @violates @ref Port_Port_Ci_C_REF_5 Violates MISRA 2004 Required Rule 11.1, cast from unsigned long to pointer. *//* @violates @ref Port_Port_Ci_C_REF_10 A cast should not be performed between a pointer type and an integral type. */REG_BIT_CLEAR32(GPIO_PDDR_ADDR32(GPIO_PORT_U32(Pin)), (uint32)(1UL << GPIO_CHANNEL_U32(Pin)));/* Check if the pin is HIGH-Z. In this case the driver needs to disable port input in PIDR register of GPIO IP*/if(PORT_PIN_HIGH_Z == eDirection){/* @violates @ref Port_Port_Ci_C_REF_5 Violates MISRA 2004 Required Rule 11.1, cast from unsigned long to pointer. *//* @violates @ref Port_Port_Ci_C_REF_10 A cast should not be performed between a pointer type and an integral type. */REG_BIT_SET32(GPIO_PIDR_ADDR32(GPIO_PORT_U32(Pin)), (uint32)(1UL << GPIO_CHANNEL_U32(Pin)));}}else{/* Do nothing */}/* Exit critical region */SchM_Exit_Port_PORT_EXCLUSIVE_AREA_03();
#if (STD_ON == PORT_DEV_ERROR_DETECT)}/* Direction changeability is NOT supported */else{PinDirError = (Std_ReturnType)E_NOT_OK;}
#endif /* (STD_ON == PORT_DEV_ERROR_DETECT) */
PortPin Mode Changeable:是否能修改引脚模式(前提是勾选Port Development Error Detect )
在Port_SetPinMode函数中可以看到如下代码,bMC就是该配置项配置的值,在设置引脚模式之前会先判断这个值。`
/* Check if port is initialized */
if (NULL_PTR == Port_pConfig)
{(void)Det_ReportError((uint16)PORT_MODULE_ID, (uint8)PORT_INSTANCE_ID, (uint8)PORT_SETPINMODE_ID, (uint8)PORT_E_UNINIT);
}
/* Check port pin validity */
else if (Pin >= (Port_PinType)Port_pConfig->u16NumPins)
{(void)Det_ReportError((uint16)PORT_MODULE_ID, (uint8)PORT_INSTANCE_ID, (uint8)PORT_SETPINMODE_ID, (uint8)PORT_E_PARAM_PIN);
}
/* Check port pin mode Unchangeable */
/** @violates @ref PORT_C_REF_5 Array indexing shall be the only allowed form of pointer arithmetic */
else if((boolean)FALSE == (boolean) Port_pConfig->pUsedPadConfig[Pin].bMC)
{(void)Det_ReportError((uint16)PORT_MODULE_ID, (uint8)PORT_INSTANCE_ID, (uint8)PORT_SETPINMODE_ID, (uint8)PORT_E_MODE_UNCHANGEABLE);
}
else#endif /* (STD_ON == PORT_DEV_ERROR_DETECT) */
{/* Sets the port pin direction */#if (STD_ON == PORT_DEV_ERROR_DETECT)u8PinModeError = (uint8)Port_Ipw_SetPinMode(Pin, Mode, Port_pConfig);#else(void)Port_Ipw_SetPinMode(Pin, Mode, Port_pConfig);#endif#if (STD_ON == PORT_DEV_ERROR_DETECT)if (PORT_E_PARAM_INVALID_MODE == u8PinModeError){(void)Det_ReportError((uint16)PORT_MODULE_ID, (uint8)PORT_INSTANCE_ID, (uint8)PORT_SETPINMODE_ID, (uint8)PORT_E_PARAM_INVALID_MODE);}#endif /* (STD_ON == PORT_DEV_ERROR_DETECT) */
}参考资料:
S32K-RM.pdf - NXP
AUTOSAR_MCAL_PORT_UM[1].pdf - NXP
这篇关于【Autosar】MCAL - PORT(NXP - S32K14x)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








