本文主要是介绍【Autosar】MCAL - DIO(NXP - S32K14x),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- MCAL - DIO(NXP - S32K14x)
- 1. 概述
- 2. API
- 3. 配置介绍
- 3.1 General
- 3.2 DioPort
- 3.3 DioChannel
- 3.4 DioChannelGroup
MCAL - DIO(NXP - S32K14x)
MCAL - 汇总
- 配置工具:EB Tresos Studio
- 芯片类型:S32K146
1. 概述
DIO模块提供接口读/写引脚的电平状态。
2. API
| 函数 | 描述 |
|---|---|
| Dio_ReadChannel | 读取通道电平状态 |
| Dio_WriteChannel | 设置通道电平状态 |
| Dio_ReadPort | 读取端口电平状态 |
| Dio_WritePort | 设置端口电平状态 |
| Dio_ReadChannelGroup | 读取通道组电平状态 |
| Dio_WriteChannelGroup | 设置通道组电平状态 |
| Dio_GetVersionInfo | 获取DIO模块版本号 |
3. 配置介绍
不管是端口、通道、通道组它的本质都只是配置引脚输出电平状态。
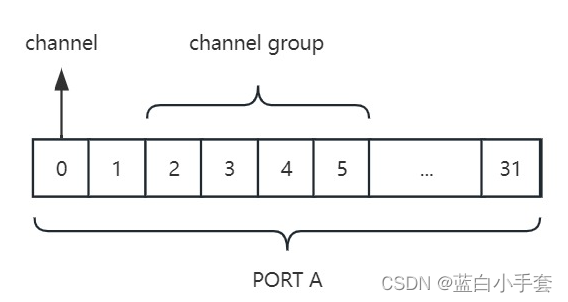
- Port:端口
- Channel:引脚
- Channel Group:由同一端口中若干个连续引脚组成
DIO为以上3种都提供了对应的访问接口,个人认为这样的设计只是为了批量操作,比如我要一次性读出RTA中所有的引脚电平状态,调用Dio_ReadPort即可返回一个32位的数据,每一位代表对应的引脚电平状态。比如我要一次性读取同一个端口中指定的且连续的引脚,那可以调用Dio_ReadChannelGroup实现局部读取操作。
3.1 General
使能API
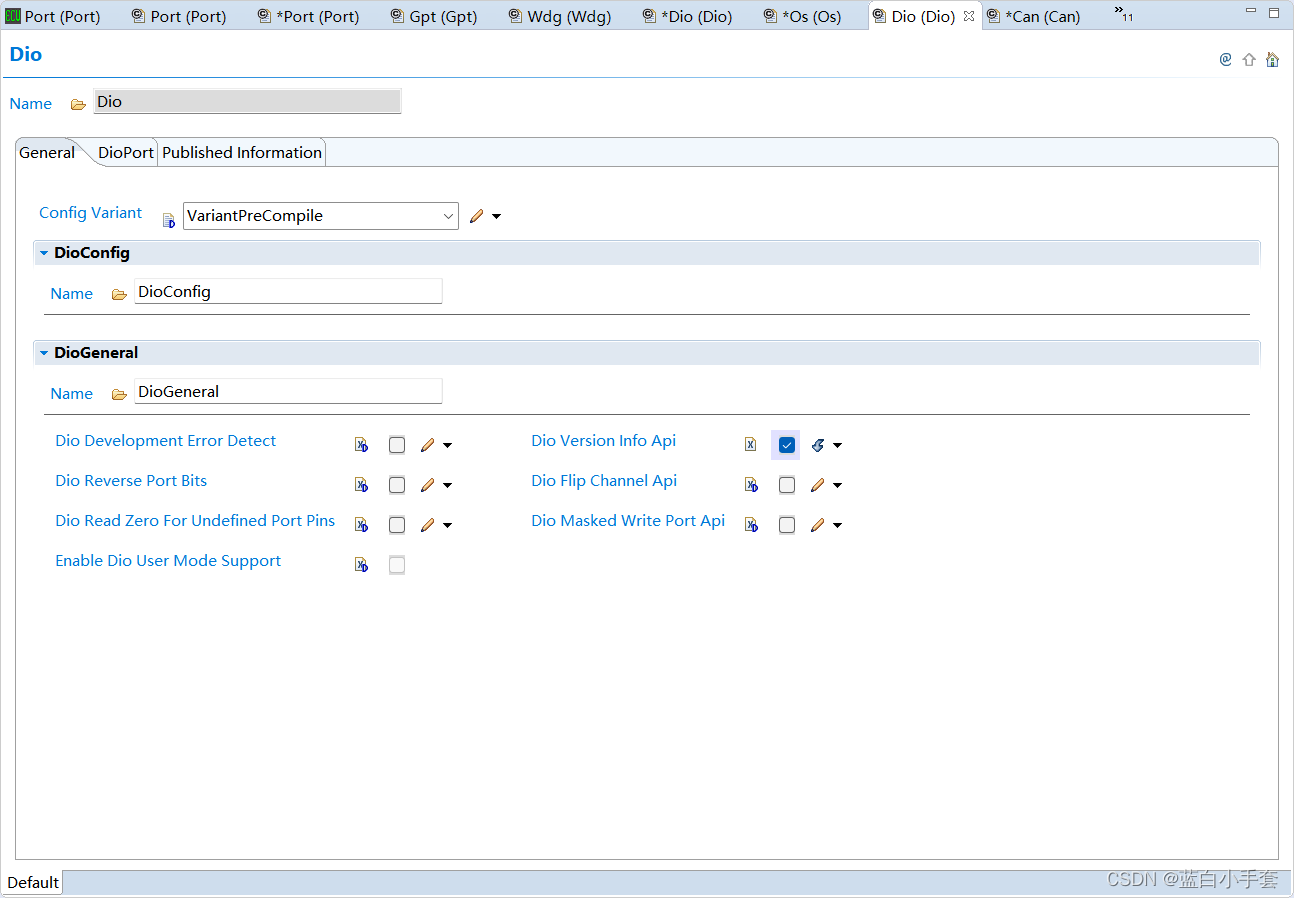
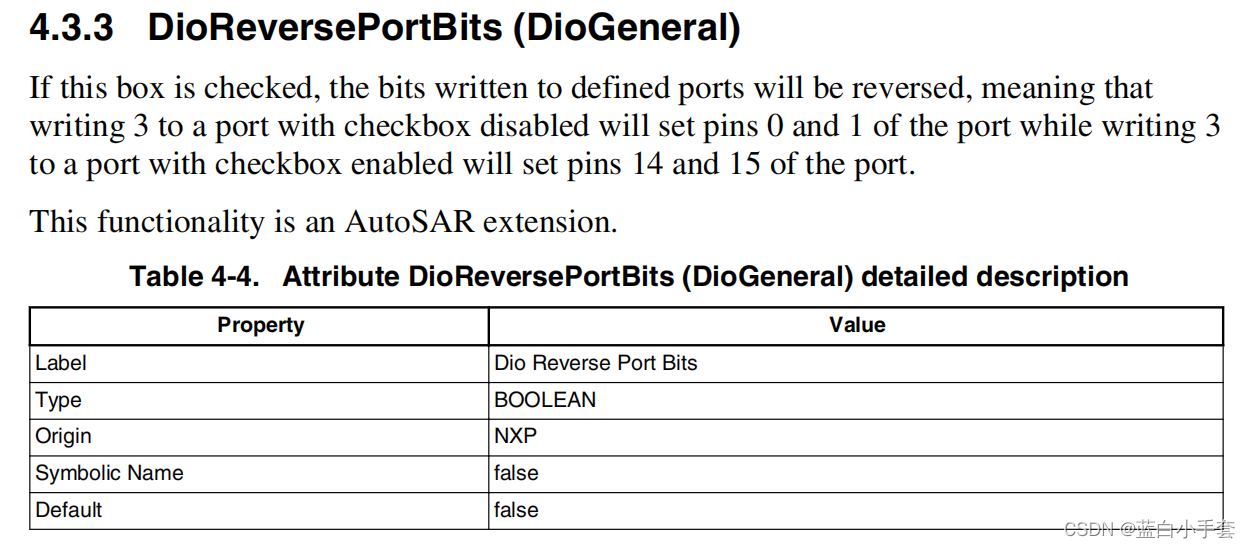
Dio Reverse Port Bits:翻转引脚
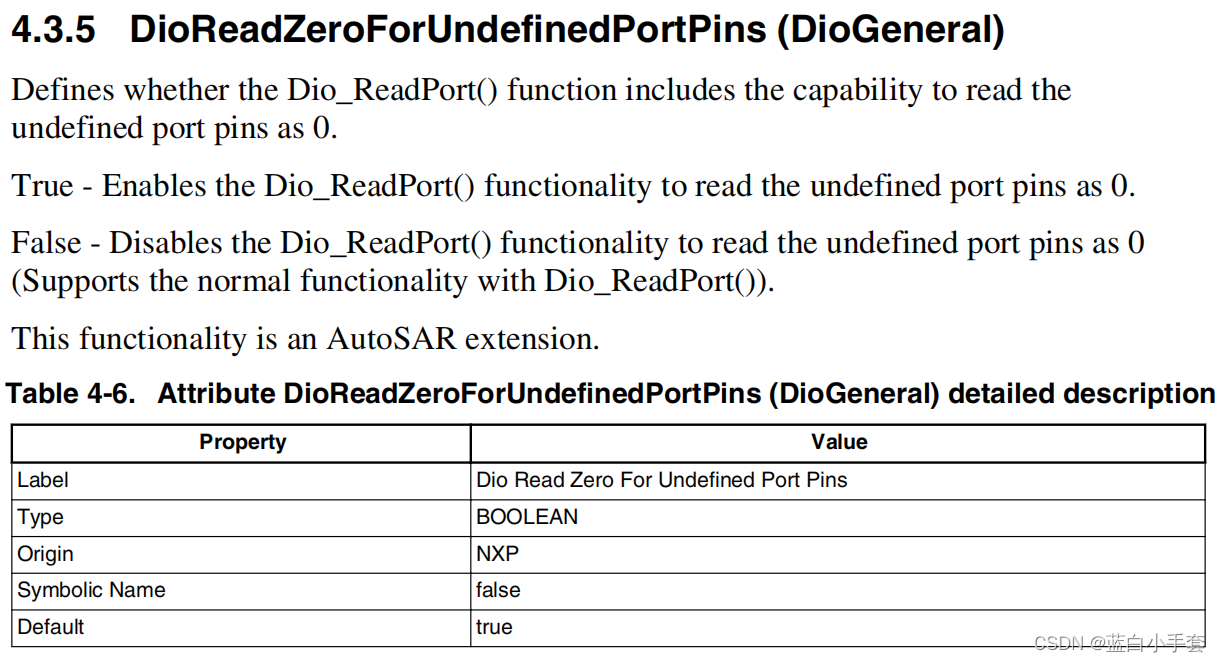
Dio Read Zero For Undefined Port Pins:未定义引脚电平状态读取返回为0
FUNC (Dio_PortLevelType, DIO_CODE) Dio_Gpio_ReadPort
(CONST(Dio_PortType, AUTOMATIC) PortId
)
{VAR(Dio_PortLevelType, AUTOMATIC) PortLevel = (Dio_PortLevelType) STD_LOW;/* @violates @ref Dio_Gpio_C_REF_2 Violates MISRA 2004 Rule 11.1, Cast from unsigned long to pointer.*//* @violates @ref Dio_Gpio_C_REF_6 A cast should not be performed between a pointer type and an integral type. */PortLevel = (Dio_PortLevelType)((REG_READ32(GPIO_PDIR_ADDR32(PortId))));
#if (STD_ON == DIO_READZERO_UNDEFINEDPORTS)/* @violates @ref Dio_Gpio_C_REF_2 Violates MISRA 2004 Rule 11.1, Cast from unsigned long to pointer.*//* @violates @ref Dio_Gpio_C_REF_6 A cast should not be performed between a pointer type and an integral type. */PortLevel =(Dio_PortLevelType)(PortLevel & Dio_aAvailablePinsForRead[PortId]);
#endif
#if (STD_ON == DIO_REVERSEPORTBITS)/* @violates @ref Dio_Gpio_C_REF_2 Violates MISRA 2004 Rule 11.1, Cast from unsigned long to pointer.*//* @violates @ref Dio_Gpio_C_REF_6 A cast should not be performed between a pointer type and an integral type. */PortLevel = (Dio_PortLevelType)(Dio_Gpio_ReverseBits(PortLevel));
#endifreturn PortLevel;
}
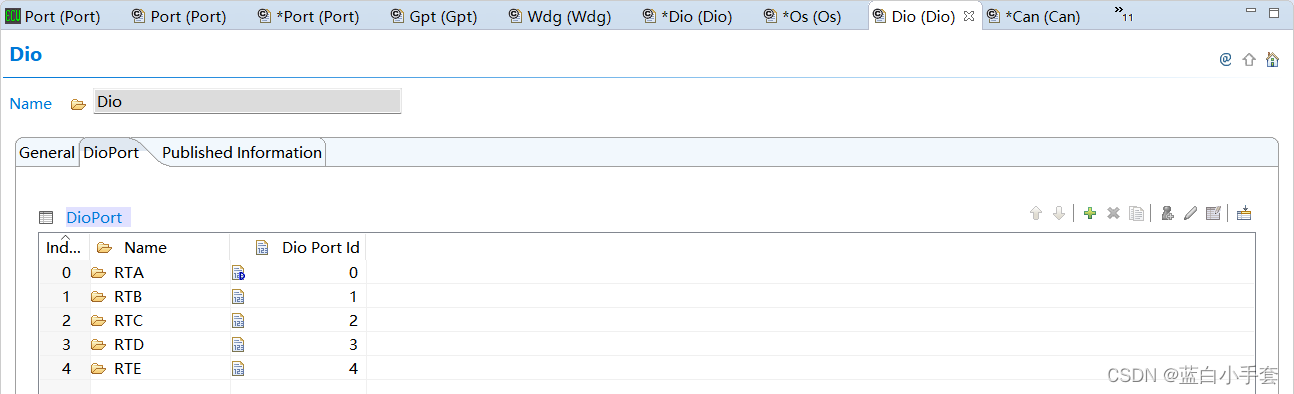
3.2 DioPort
配置端口号,我用的是S32K146芯片,所以有5个端口:A(0)、B(1)、C(2)、D(3)、E(4)。
通过下面这段代码可以看到通过端口序号来计算出每个端口的起始地址:
/* @violates @ref Dio_Reg_eSys_Gpio_H_REF_1 Function-like macro defined */
#define GPIO_PDIR_ADDR32(port) ((uint32)(GPIO_BASEADDR + GPIO_PDIR_OFFSET_ADDR32 + ((uint32)(port) * (uint32)0x40) ))
配置完以后可以在Dio_cfg.h中看到如下定义:
/* ---------- RTA ---------- *//**
* @brief Symbolic name for the port RTA.
*
*/
#define DioConf_DioPort_RTA ((uint8)0x00U)/* ---------- RTB ---------- *//**
* @brief Symbolic name for the port RTB.
*
*/
#define DioConf_DioPort_RTB ((uint8)0x01U)/* ---------- RTC ---------- *//**
* @brief Symbolic name for the port RTC.
*
*/
#define DioConf_DioPort_RTC ((uint8)0x02U)/* ---------- RTD ---------- *//**
* @brief Symbolic name for the port RTD.
*
*/
#define DioConf_DioPort_RTD ((uint8)0x03U)/* ---------- RTE ---------- *//**
* @brief Symbolic name for the port RTE.
*
*/
#define DioConf_DioPort_RTE ((uint8)0x04U)
3.3 DioChannel
在DioChannel中可以配置需要操作的引脚,如下图所示,我们在端口RTE下,配置了引脚3(RTE3):
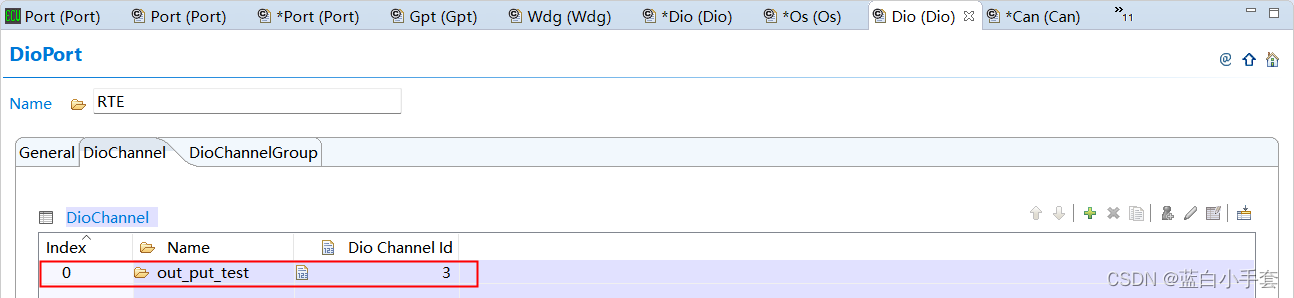
配置完以后可以在Dio_cfg.h中看到如下定义,看到这个定义是不是似曾相识,在介绍Port模块的时候介绍过Pcr序号的计算方式,0x0083 = 131 = 4 * 32 + 3:
/** @violates @ref Dio_Cfg_H_REF_1 The used compilers use more than 31 chars for identifiers. */
#define DioConf_DioChannel_out_put_test ((uint16)0x0083U)
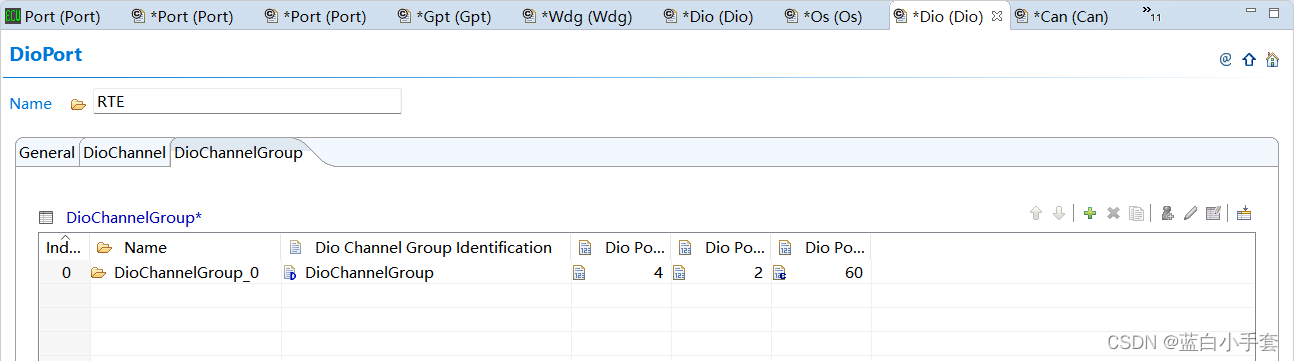
3.4 DioChannelGroup
在DioChannelGroup中我们可以配置通道组,如下所示,在RTE端口下,新建一个通道组
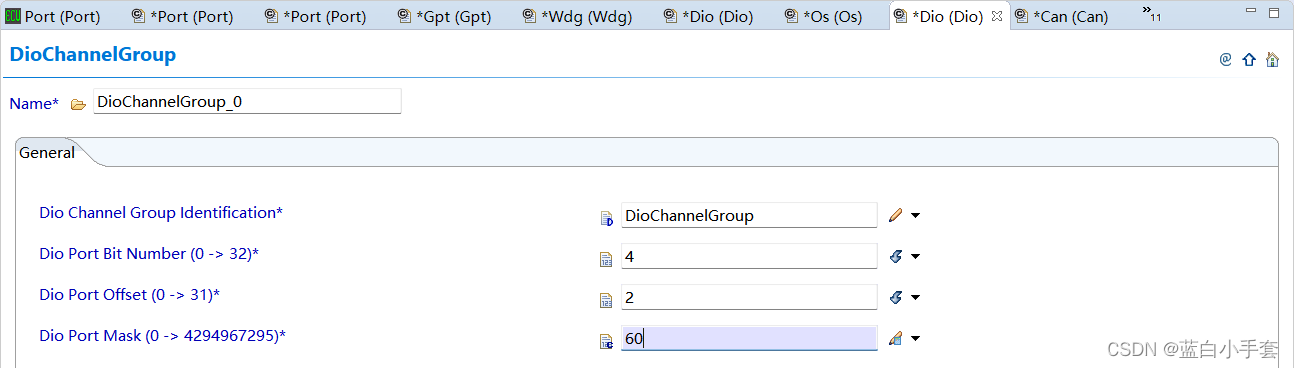
Dio Port Bit Number:通道个数
Dio Port Offset:起始通道号(偏移值)
Dio Port Mask:自动计算即可
如上图所示,我们的通道组配置范围是RTE2~RTE5。
参考资料:
S32K-RM.pdf - NXP
AUTOSAR_MCAL_DIO_UM[1].pdf - NXP
这篇关于【Autosar】MCAL - DIO(NXP - S32K14x)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








