本文主要是介绍cruise/matlab联合仿真计算增程式混动四驱。 包含最佳经济性扭矩分配,内燃机功率跟随,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
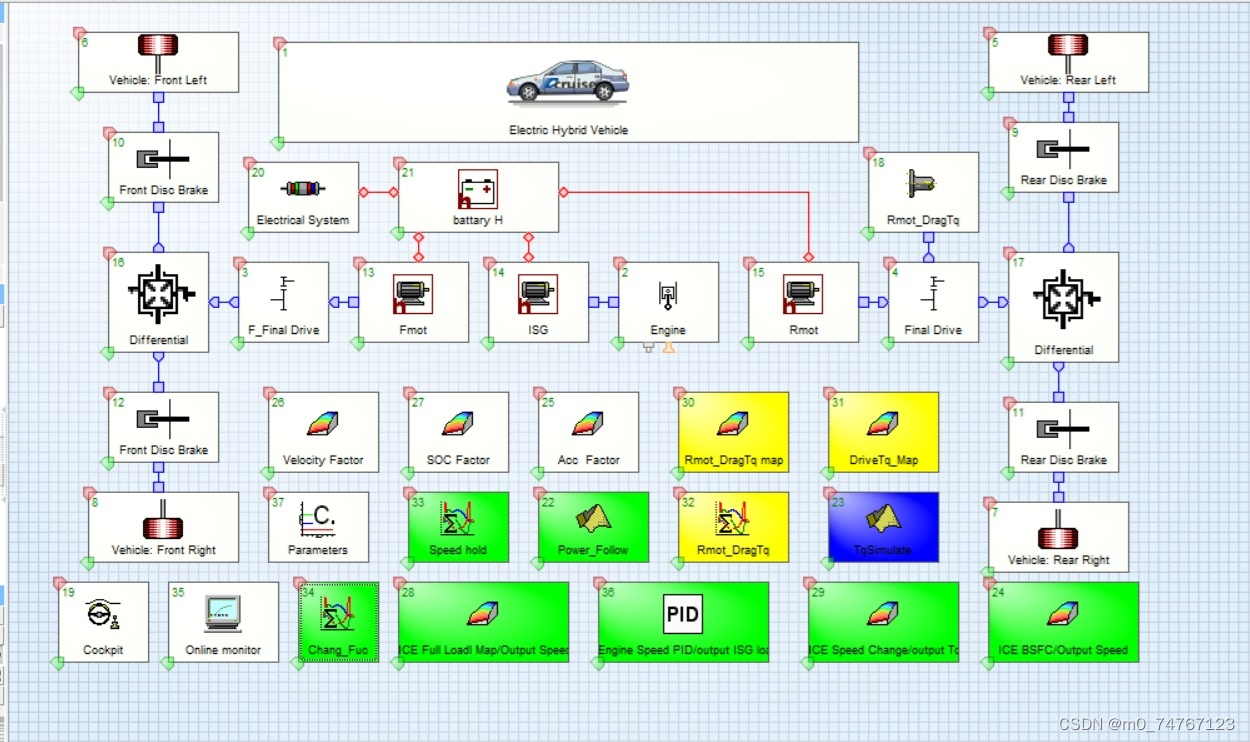
cruise/matlab联合仿真计算增程式混动四驱。
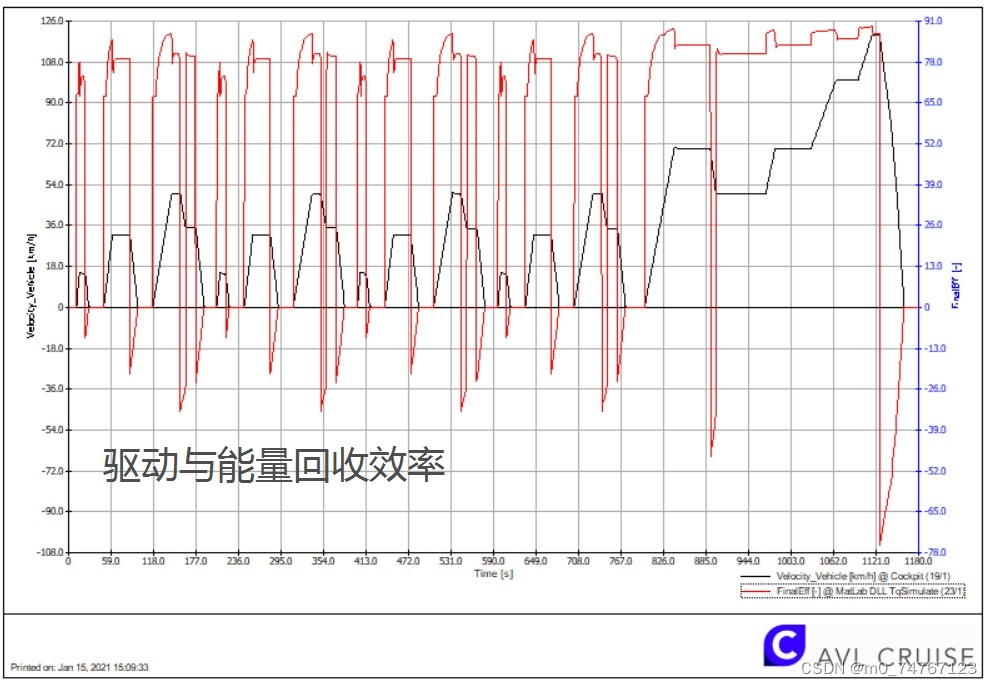
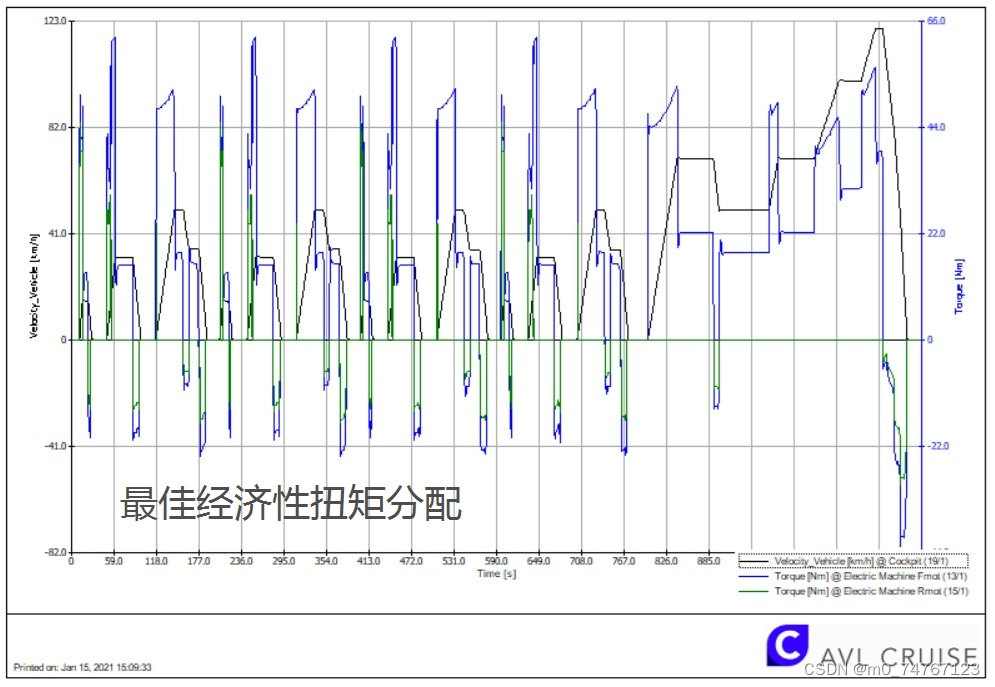
包含最佳经济性扭矩分配,内燃机功率跟随,最佳能量回收策略。
学好该模型,一般的混动都会,都是matlab编辑的策略,会了后不仅仅可以做动力性经济性仿真,还可以初步进入软件策略编写。
ID:171000636006068815 夏天的春天
夏天的春天
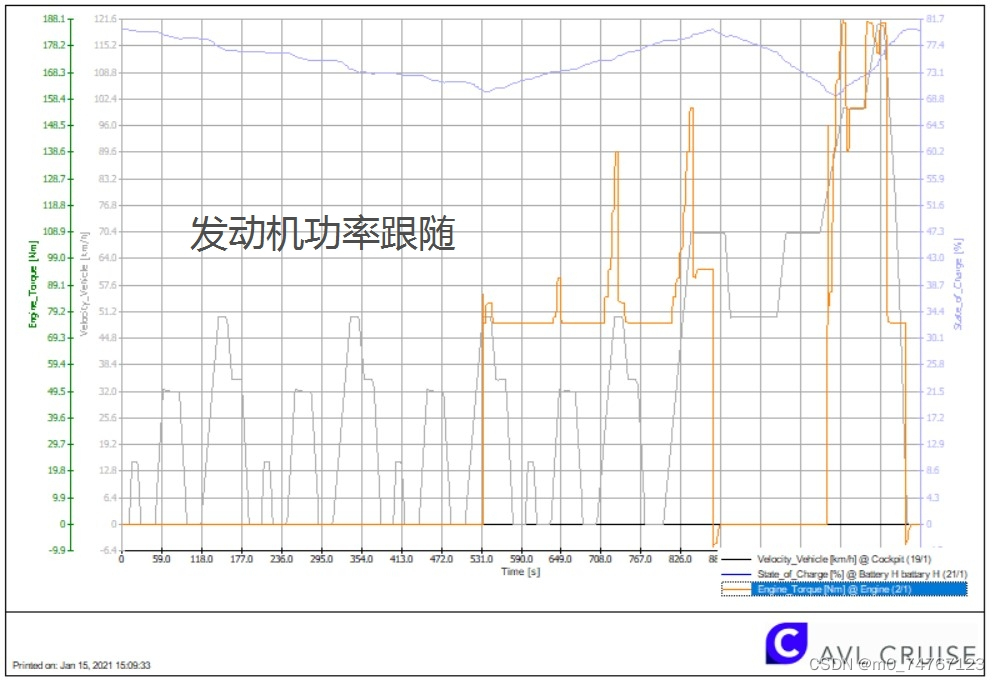
这篇关于cruise/matlab联合仿真计算增程式混动四驱。 包含最佳经济性扭矩分配,内燃机功率跟随的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



