本文主要是介绍【STM32】TIM2的PWM:脉冲宽度调制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
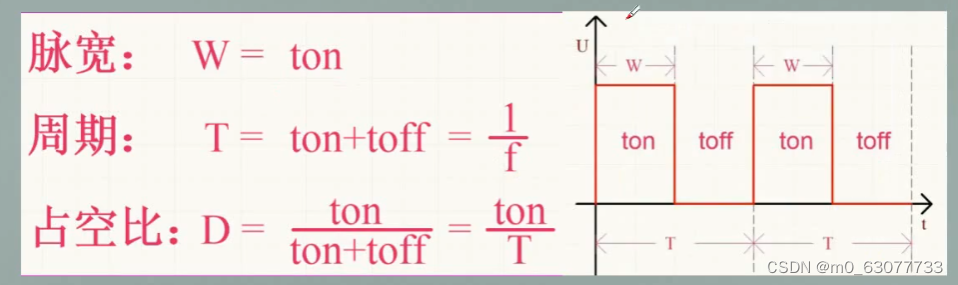
PWM是一种周期固定,脉宽可调整的输出波形。
0.通用寄存器输出
1.捕获/比较通道1的主电路--中间部分

2.捕获/比较通道的输出部分--输出

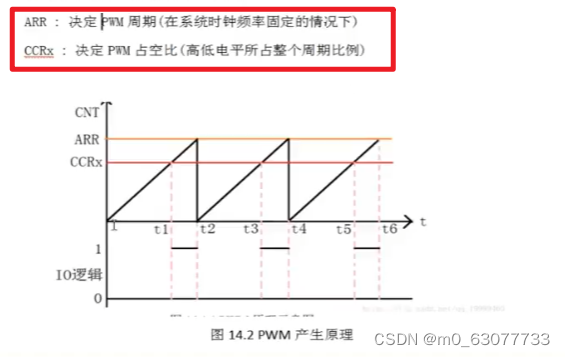
3.通用定时器输出PWM原理

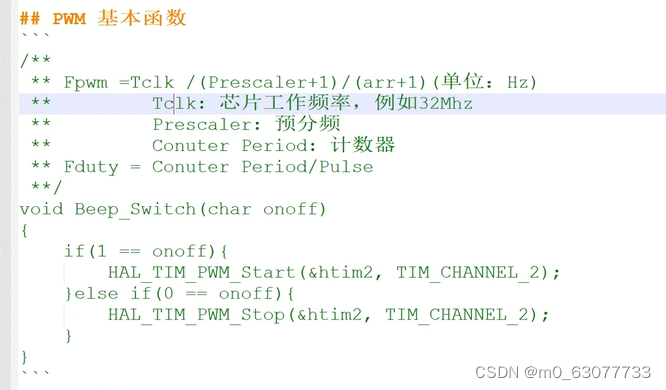
PWM波周期或者频率由ARR(就是要进递增/递减的值)决定,PWM波占空比由CRRx决定。
1.定时器的PWM输出功能介绍

1)通过定时器的中断,在isr中将一个GPIO引脚电平反转,可以实现PWM输出功能【麻烦,设置多】
2)定时器附带专用的PWM输出功能,定时器那边和某一个引脚绑定,然后定时器设置好了之后内部开始+1或者-1,然后时间到了之后不是产生中断,而是直接将绑定的引脚电平反转产生PWM输出。【CPU不参与,效率高】
1.占空比:脉宽(高电平)占总周期的比例
1)可以用来调制脉冲宽度--》脉冲宽度调制
2)占空比的调节,是通过比较值与计数器的大小差距,当两者的关系改变的时,会进行电平反转。


2.PWM频率
频率越大,切换速度越快,时间段越短

3.PWM占空比和周期
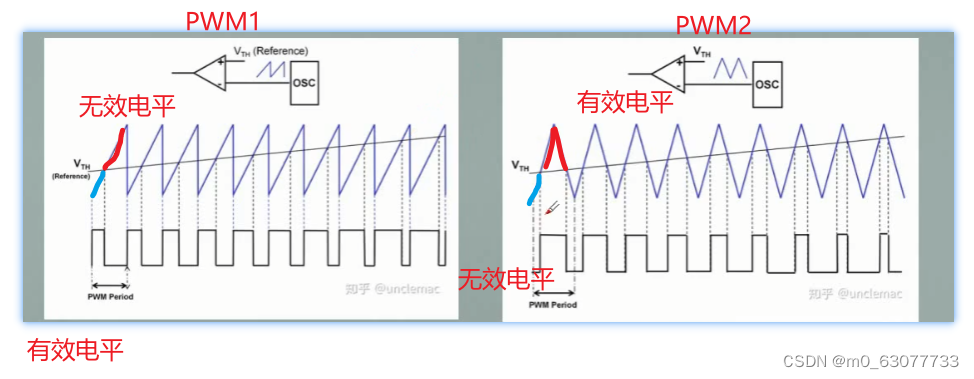
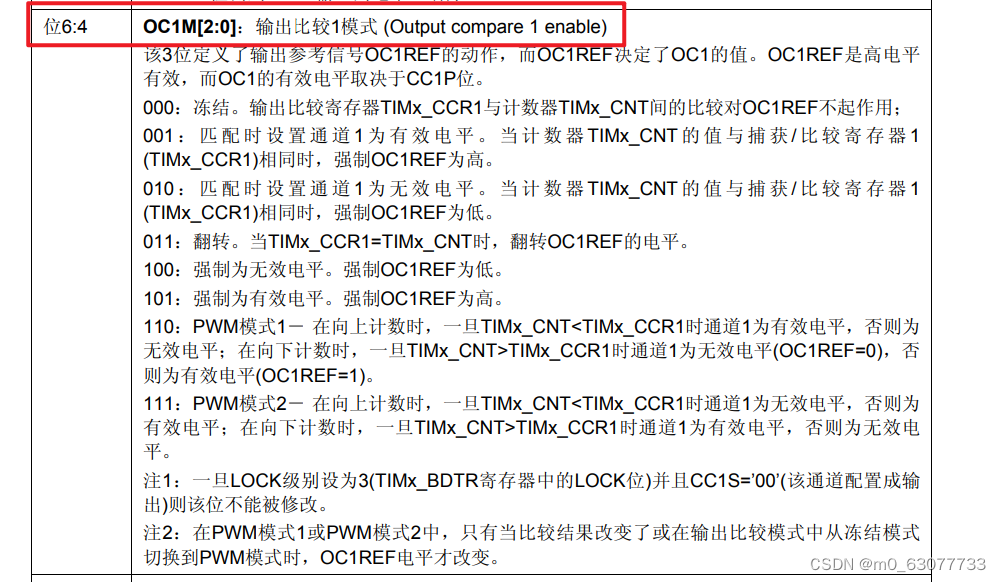
4.PWM1 VS PWM2
2.专用PWM输出的实现原理
1.比较功能
1)所谓的比较原理,设计3个计数有关的寄存器:CMP(比较),CNT(计数器),ARR(存放计数原始值)
定时器有4个输出通道,每一个通道都有一个捕获/比较寄存器,将寄存器值(ARR)和计数器值(CNT)进行比较,通过比较结果输出高低电平,实现PWM信号输出。
高低电平的1和0可以进行设置
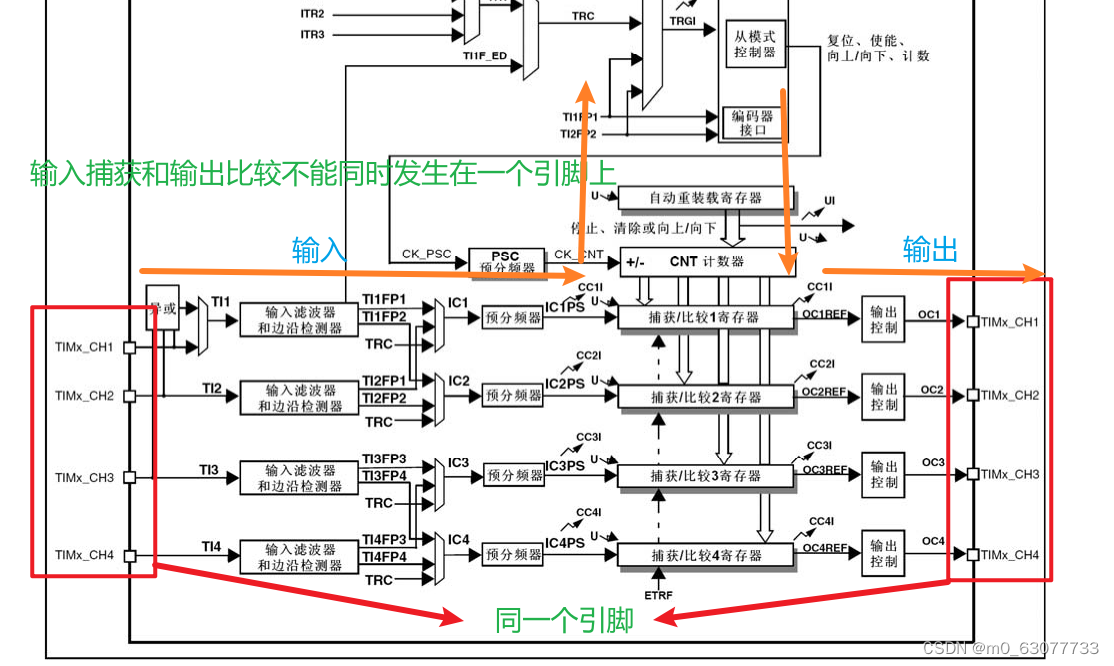
2)在输入捕获/输出比较功能中--都要使用同一个外部引脚
3)每一个定时器只有一个计数器,但是每一个通道都有自己的捕获/比较寄存器,因此对于一个定时器来说,4路输出的PWM频率(周期)都是相同的,而不同通道的占空比可以不同。

2.相关寄存器
1.TIMx_CNT(计数器),TIMx_ARR(自动重装载寄存器),TIMx_CCRn(捕获/比较寄存器)
TIMx_CCRn:是来选择哪一条通道

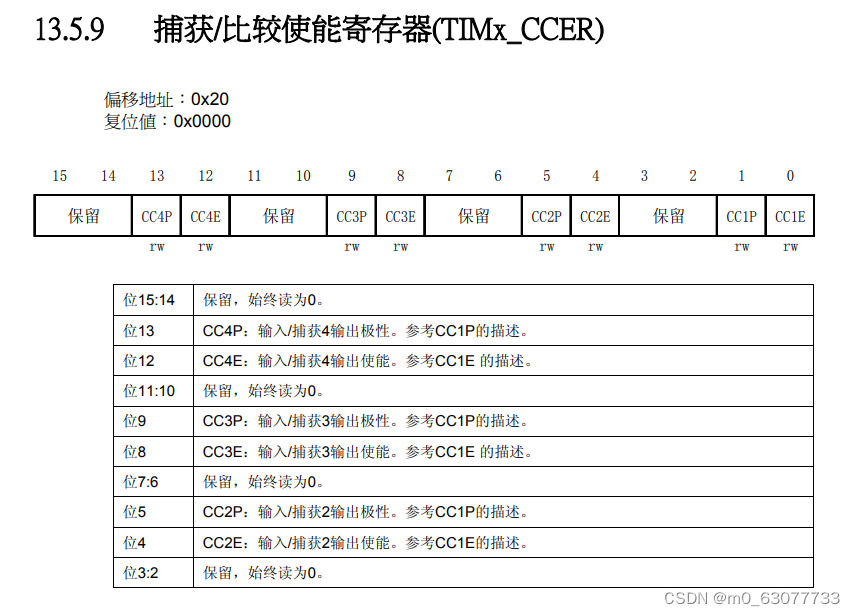
2.CCMR1,CCMR2,CCER:捕获/比较模式寄存器
CCMR1:处理了通道1和通道2
CCMR2:处理了通道3和通道4
CCER:配置要什么电平才是有效的



3.CR1,CR2,PSC
CR1,CR2:使能,开关
PSC:分频功能
3.标准库中相关的API
1.TIM_TimeBaseInit
void TIM_TimeBaseInit(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct)
{uint16_t tmpcr1 = 0;/* Check the parameters */assert_param(IS_TIM_ALL_PERIPH(TIMx)); assert_param(IS_TIM_COUNTER_MODE(TIM_TimeBaseInitStruct->TIM_CounterMode));assert_param(IS_TIM_CKD_DIV(TIM_TimeBaseInitStruct->TIM_ClockDivision));tmpcr1 = TIMx->CR1; if((TIMx == TIM1) || (TIMx == TIM8)|| (TIMx == TIM2) || (TIMx == TIM3)||(TIMx == TIM4) || (TIMx == TIM5)) {/* Select the Counter Mode */tmpcr1 &= (uint16_t)(~((uint16_t)(TIM_CR1_DIR | TIM_CR1_CMS)));tmpcr1 |= (uint32_t)TIM_TimeBaseInitStruct->TIM_CounterMode;}if((TIMx != TIM6) && (TIMx != TIM7)){/* Set the clock division */tmpcr1 &= (uint16_t)(~((uint16_t)TIM_CR1_CKD));tmpcr1 |= (uint32_t)TIM_TimeBaseInitStruct->TIM_ClockDivision;}TIMx->CR1 = tmpcr1;/* Set the Autoreload value *///要计数的值TIMx->ARR = TIM_TimeBaseInitStruct->TIM_Period ;/* Set the Prescaler value *///预分频参数TIMx->PSC = TIM_TimeBaseInitStruct->TIM_Prescaler;if ((TIMx == TIM1) || (TIMx == TIM8)|| (TIMx == TIM15)|| (TIMx == TIM16) || (TIMx == TIM17)) {/* Set the Repetition Counter value */TIMx->RCR = TIM_TimeBaseInitStruct->TIM_RepetitionCounter;}/* Generate an update event to reload the Prescaler and the Repetition countervalues immediately *///预分频器参数的改变TIMx->EGR = TIM_PSCReloadMode_Immediate;
}2.TIM_OC1Init(TIM_OCnInit)
TIM_OCn--->指的使用了哪一个通道
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct)
{uint16_t tmpccmrx = 0, tmpccer = 0, tmpcr2 = 0;/* Check the parameters */assert_param(IS_TIM_LIST8_PERIPH(TIMx));assert_param(IS_TIM_OC_MODE(TIM_OCInitStruct->TIM_OCMode));assert_param(IS_TIM_OUTPUT_STATE(TIM_OCInitStruct->TIM_OutputState));assert_param(IS_TIM_OC_POLARITY(TIM_OCInitStruct->TIM_OCPolarity)); /* Disable the Channel 1: Reset the CC1E Bit */TIMx->CCER &= (uint16_t)(~(uint16_t)TIM_CCER_CC1E);/* Get the TIMx CCER register value */tmpccer = TIMx->CCER;/* Get the TIMx CR2 register value */tmpcr2 = TIMx->CR2;/* Get the TIMx CCMR1 register value */tmpccmrx = TIMx->CCMR1;/* Reset the Output Compare Mode Bits */tmpccmrx &= (uint16_t)(~((uint16_t)TIM_CCMR1_OC1M));tmpccmrx &= (uint16_t)(~((uint16_t)TIM_CCMR1_CC1S));/* Select the Output Compare Mode */tmpccmrx |= TIM_OCInitStruct->TIM_OCMode;/* Reset the Output Polarity level */tmpccer &= (uint16_t)(~((uint16_t)TIM_CCER_CC1P));/* Set the Output Compare Polarity */tmpccer |= TIM_OCInitStruct->TIM_OCPolarity;/* Set the Output State */tmpccer |= TIM_OCInitStruct->TIM_OutputState;if((TIMx == TIM1) || (TIMx == TIM8)|| (TIMx == TIM15)||(TIMx == TIM16)|| (TIMx == TIM17)){assert_param(IS_TIM_OUTPUTN_STATE(TIM_OCInitStruct->TIM_OutputNState));assert_param(IS_TIM_OCN_POLARITY(TIM_OCInitStruct->TIM_OCNPolarity));assert_param(IS_TIM_OCNIDLE_STATE(TIM_OCInitStruct->TIM_OCNIdleState));assert_param(IS_TIM_OCIDLE_STATE(TIM_OCInitStruct->TIM_OCIdleState));/* Reset the Output N Polarity level */tmpccer &= (uint16_t)(~((uint16_t)TIM_CCER_CC1NP));/* Set the Output N Polarity */tmpccer |= TIM_OCInitStruct->TIM_OCNPolarity;/* Reset the Output N State */tmpccer &= (uint16_t)(~((uint16_t)TIM_CCER_CC1NE)); /* Set the Output N State */tmpccer |= TIM_OCInitStruct->TIM_OutputNState;/* Reset the Output Compare and Output Compare N IDLE State */tmpcr2 &= (uint16_t)(~((uint16_t)TIM_CR2_OIS1));tmpcr2 &= (uint16_t)(~((uint16_t)TIM_CR2_OIS1N));/* Set the Output Idle state */tmpcr2 |= TIM_OCInitStruct->TIM_OCIdleState;/* Set the Output N Idle state */tmpcr2 |= TIM_OCInitStruct->TIM_OCNIdleState;}/* Write to TIMx CR2 */TIMx->CR2 = tmpcr2;/* Write to TIMx CCMR1 */TIMx->CCMR1 = tmpccmrx;/* Set the Capture Compare Register value */TIMx->CCR1 = TIM_OCInitStruct->TIM_Pulse; /* Write to TIMx CCER */TIMx->CCER = tmpccer;
}3.TIM_OCInitTypeDef:OC的结构体
typedef struct
{
//选择TIM的模式uint16_t TIM_OCMode; /*!< Specifies the TIM mode.This parameter can be a value of @ref TIM_Output_Compare_and_PWM_modes */
//选择TIM的输出状态uint16_t TIM_OutputState; /*!< Specifies the TIM Output Compare state.This parameter can be a value of @ref TIM_Output_Compare_state */uint16_t TIM_OutputNState; /*!< Specifies the TIM complementary Output Compare state.This parameter can be a value of @ref TIM_Output_Compare_N_state@note This parameter is valid only for TIM1 and TIM8. */
//要进行比较的值uint16_t TIM_Pulse; /*!< Specifies the pulse value to be loaded into the Capture Compare Register. This parameter can be a number between 0x0000 and 0xFFFF */
//输出的极性uint16_t TIM_OCPolarity; /*!< Specifies the output polarity.This parameter can be a value of @ref TIM_Output_Compare_Polarity */uint16_t TIM_OCNPolarity; /*!< Specifies the complementary output polarity.This parameter can be a value of @ref TIM_Output_Compare_N_Polarity@note This parameter is valid only for TIM1 and TIM8. */uint16_t TIM_OCIdleState; /*!< Specifies the TIM Output Compare pin state during Idle state.This parameter can be a value of @ref TIM_Output_Compare_Idle_State@note This parameter is valid only for TIM1 and TIM8. */uint16_t TIM_OCNIdleState; /*!< Specifies the TIM Output Compare pin state during Idle state.This parameter can be a value of @ref TIM_Output_Compare_N_Idle_State@note This parameter is valid only for TIM1 and TIM8. */
} TIM_OCInitTypeDef;1.TIM_OCMode:选择TIM的模式

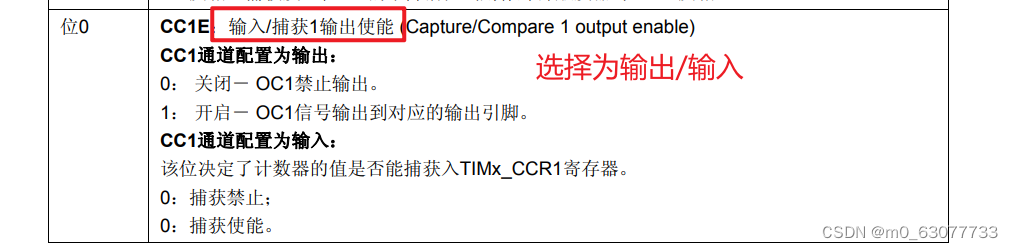
2.TIM_OutputState:选择输出类型
选择输出有效电平类型

3.TIM_Pulse:输入要进行比较的值


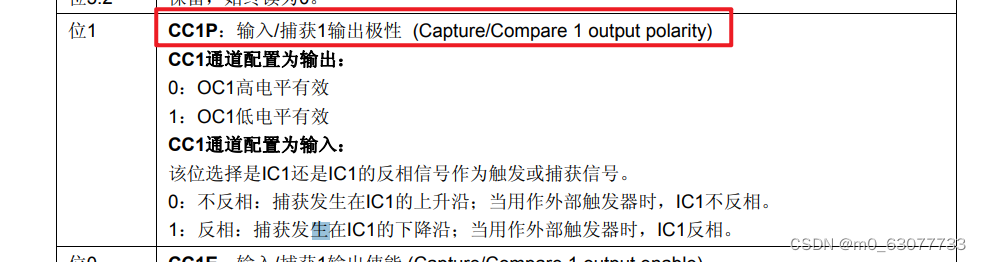
4.TIM_OCPolarity:设置输出极性

4.TIM_OCnPreloadConfig
void TIM_ForcedOC1Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction)
{uint16_t tmpccmr1 = 0;/* Check the parameters */assert_param(IS_TIM_LIST8_PERIPH(TIMx));assert_param(IS_TIM_FORCED_ACTION(TIM_ForcedAction));tmpccmr1 = TIMx->CCMR1;/* Reset the OC1M Bits */tmpccmr1 &= (uint16_t)~((uint16_t)TIM_CCMR1_OC1M);/* Configure The Forced output Mode */tmpccmr1 |= TIM_ForcedAction;/* Write to TIMx CCMR1 register */TIMx->CCMR1 = tmpccmr1;
}5.TIM_OC1PreloadConfig


void TIM_OC1PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload)
{uint16_t tmpccmr1 = 0;/* Check the parameters */assert_param(IS_TIM_LIST8_PERIPH(TIMx));assert_param(IS_TIM_OCPRELOAD_STATE(TIM_OCPreload));tmpccmr1 = TIMx->CCMR1;/* Reset the OC1PE Bit */tmpccmr1 &= (uint16_t)~((uint16_t)TIM_CCMR1_OC1PE);/* Enable or Disable the Output Compare Preload feature */tmpccmr1 |= TIM_OCPreload;/* Write to TIMx CCMR1 register */TIMx->CCMR1 = tmpccmr1;
}6.TIM_ClearOC1Ref
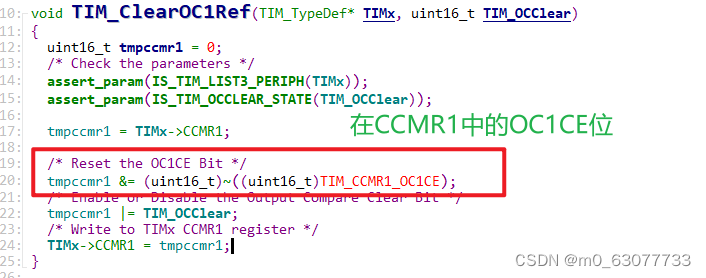

void TIM_ClearOC1Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear)
{uint16_t tmpccmr1 = 0;/* Check the parameters */assert_param(IS_TIM_LIST3_PERIPH(TIMx));assert_param(IS_TIM_OCCLEAR_STATE(TIM_OCClear));tmpccmr1 = TIMx->CCMR1;/* Reset the OC1CE Bit */tmpccmr1 &= (uint16_t)~((uint16_t)TIM_CCMR1_OC1CE);/* Enable or Disable the Output Compare Clear Bit */tmpccmr1 |= TIM_OCClear;/* Write to TIMx CCMR1 register */TIMx->CCMR1 = tmpccmr1;
}7.TIM_OC1PolarityConfig
void TIM_OC1PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity)
{uint16_t tmpccer = 0;/* Check the parameters */assert_param(IS_TIM_LIST8_PERIPH(TIMx));assert_param(IS_TIM_OC_POLARITY(TIM_OCPolarity));tmpccer = TIMx->CCER;/* Set or Reset the CC1P Bit */tmpccer &= (uint16_t)~((uint16_t)TIM_CCER_CC1P);tmpccer |= TIM_OCPolarity;/* Write to TIMx CCER register */TIMx->CCER = tmpccer;
}4.GPIO引脚和PWM的对应关系
STM32F103中文教程及参考手册.pdf · 林何/STM32F103C8 - 码云 - 开源中国 (gitee.com)
在AFIO中进行查找
没有重映像:表示默认接入的io口
完全重映像:如果使用这个则要调用函数进行声明【GPIO_PinRemapConfig】

5.TIM2的专用PWM输出编程实践
1.官方示例代码
我们使用的是TIM3,因为我们复用了GPIOA,所以要去AFIO中去查找TIM3对应的关系

#include "pwm.h"
#include "led.h"//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM1_PWM_Init(u16 arr,u16 psc)
{ GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); // RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外设时钟使能//设置该引脚为复用输出功能,输出TIM1 CH1的PWM脉冲波形GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //TIM_CH1GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80KTIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMxTIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能 TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH1预装载使能 TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器TIM_Cmd(TIM1, ENABLE); //使能TIM1
}
2.代码移植
我们先去查看我们进行操作的TIM2对应应该复用哪一个AFIO引脚

可知TIM2的通道1对于的没有重映像是PA0

#include "stm32f10x.h" // Device header
/**使用TIM2的Channel1,无重映射时对应PA0引脚,在原理图上对应P1.0
*/void pwm_init(void);int main(){pwm_init(); //频率是2Khreturn 0;
}void pwm_init(void)
{GPIO_InitTypeDef GPIO_InitStructure; //声明一个结构体变量,用来初始化GPIOTIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;//声明一个结构体变量,用来初始化定时器TIM_OCInitTypeDef TIM_OCInitStructure;//根据TIM_OCInitStruct中指定的参数初始化外设TIMx/* 开启时钟 */RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);/* 配置GPIO的模式和IO口 */GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出GPIO_Init(GPIOA,&GPIO_InitStructure); // GPA15,// time = CNT/fHz = 9000/72000000s// Fpwm = 1/T = 72000000/9000Hz = 8000Hz = 8KHz//TIM3定时器初始化TIM_TimeBaseInitStructure.TIM_Period = 9000 - 1; //不分频,PWM 频率=72000/900=8Khz//设置自动重装载寄存器周期的值TIM_TimeBaseInitStructure.TIM_Prescaler = 0;//设置用来作为TIMx时钟频率预分频值,100Khz计数频率TIM_TimeBaseInitStructure.TIM_ClockDivision = 0;//设置时钟分割:TDTS = Tck_timTIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM2, & TIM_TimeBaseInitStructure);// 将TIM2的输出引脚进行fll remap到PA15,也就是P3.7//GPIO_PinRemapConfig(GPIO_FullRemap_TIM2, ENABLE);//PWM初始化 //根据TIM_OCInitStruct中指定的参数初始化外设TIMxTIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;//PWM输出使能//TIM_OCInitStructure.TIM_Pulse = 4500 - 1;//TIM_Pulse:设置占空比【占了1/3==3000/9000】TIM_OCInitStructure.TIM_Pulse = 3000 - 1;TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OC1Init(TIM2,&TIM_OCInitStructure);TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable);TIM_Cmd(TIM2,ENABLE);//使能或者失能TIMx外设
}
这篇关于【STM32】TIM2的PWM:脉冲宽度调制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







